1.本发明涉及智能设备领域,尤其涉及一种智能导盲手杖。
背景技术:
2.目前在盲人的外出活动中,起到最大作用的就是导盲犬,再有就是一些可以帮助盲人探测到前方障碍物的智能拐杖。针对导盲犬来说,资源稀缺并且价格昂贵,训练导盲犬也要花费大量的时间和精力;另外现有的智能拐杖只能保证盲人对前方障碍物的探测,无法做到使盲人独自安全地通过马路。
3.现有导盲技术的缺点包括:首先导盲犬的价格稀缺且昂贵,训练导盲犬也要花费大量的时间和精力;其次现有的智能拐杖功能不齐全,大部分的智能拐杖只能探测盲人身边的障碍物,通过语音提醒来告知盲人前方障碍物的位置,并没有针对盲人过马路来识别红绿灯的装置,无法对盲人的出行做到全方位的保障。
技术实现要素:
4.有鉴于现有技术的上述缺陷,本发明提供一种智能导盲手杖,通过红外双目摄像头、毫米波雷达配合5g通信技术实现了盲人智能导航。
5.本发明提供了一种智能导盲手杖,其特征在于包括:
6.手杖杆,其底部为伸缩式结构;
7.手杖手柄,沿横向设置在所述手杖杆的顶端;所述手杖手柄的前端安装有双目红外摄像头以及毫米波雷达;所述手杖手柄的内部设置有卫星定位模块以及控制模块;
8.所述控制模块用于将卫星定位模块的定位信息、所述双目红外摄像头的红外图像以及毫米波雷达的检测结果上传至服务器;
9.所述服务器被配置为通过红外图像识别手杖手柄前方的红绿灯,并识别红绿灯的亮灯情况以及剩余亮灯时间;并通过毫米波雷达识别障碍物;所述服务器根据红绿灯亮灯情况、剩余亮灯时间以及障碍物识别结果生成语音提示发送至使用者的骨传导耳机。
10.本发明的进一步改进在于:所述手杖杆的最末节由电动缸进行驱动伸缩;其伸缩控制按钮位于手杖杆的顶端侧面。
11.本发明的进一步改进在于:所述手杖杆的顶部设置有充电接口。
12.本发明的进一步改进在于:所述控制模块通过5g网络与所述服务器通信连接。
13.本发明提供的装置具有以下技术效果:本发明从盲人出行安全的角度出发,设计了一款不仅可以探测盲人前方障碍物,而且可以识别出红绿灯的状态的装置。目的在于使盲人出行更加安全。本发明操作便捷,仅仅通过手杖头部的两个按钮就可以实现手杖的伸长以及功能的启动。除了盲人之外,色盲色弱等群体也可以使用,增加他们独自出行的安全系数,不仅可以减少训练导盲犬的资源,而且使盲人的家属更加轻松。方便了家人生活的同时,也保障了盲人出行的安全。
附图说明
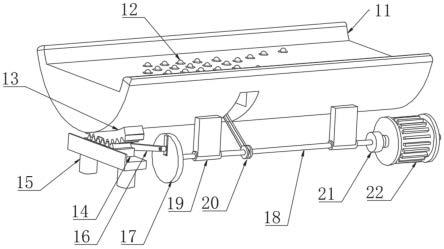
14.图1为智能导盲手杖的立体视图;
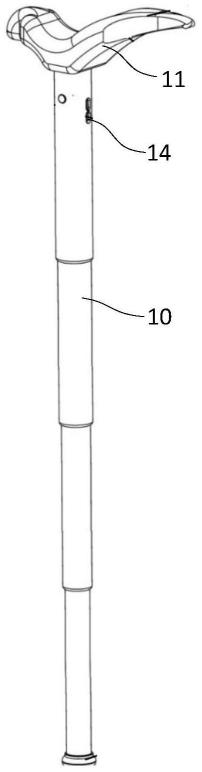
15.图2为智能导盲手杖的另一立体视图。
具体实施方式
16.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
17.如图1、2所示,本发明的实施例提供一种智能导盲手杖,其包括:
18.手杖杆10,其底部为伸缩式结构;
19.手杖手柄11,沿横向设置在手杖杆10的顶端;手杖手柄11的前端安装有双目红外摄像头12以及毫米波雷达13;手杖手柄11的内部设置有卫星定位模块以及控制模块;
20.控制模块用于将卫星定位模块的定位信息、双目红外摄像头12的红外图像以及毫米波雷达13的检测结果上传至服务器;
21.服务器被配置为通过红外图像识别手杖手柄11前方的红绿灯,并识别红绿灯的亮灯情况以及剩余亮灯时间;并通过毫米波雷达13识别障碍物;服务器根据红绿灯亮灯情况、剩余亮灯时间以及障碍物识别结果生成语音提示发送至使用者的骨传导耳机。
22.在一些实施例中,手杖杆的最末节由电动缸进行驱动伸缩;其伸缩控制按钮位于手杖杆10的顶端侧面。
23.在一些实施例中,手杖杆10的顶部设置有充电接口14。
24.在一些实施例中,控制模块通过5g网络与服务器通信连接。
25.在具体实施过程中,手杖杆10的顶部设有两个控制按钮,一个用来控制手杖的伸缩,另一个控制整个手杖的功能启动。双目红外摄像头12放置在整个装置的最上端,用来获取盲人周围的环境图像;毫米波雷达放置在装置内部,通过可透过电磁波的复合材料防护罩进行保护。
26.服务器利用卷积神经网络进行图像比对,从而识别出图像当中的红绿灯。毫米波雷达进行盲点检测,防止盲人与障碍物发生碰撞。同时配合高精地图,及时探测道路情况以及红绿灯的位置,并测出盲人与红绿灯之间的距离。最后通过骨传导耳机的方式告知盲人前方红绿灯的状态,从而判断是否可以穿过马路。另外手杖不仅配有相应的充电口,而且手杖的头部配有太阳能电池板,不仅在阴雨天进行充电口充电,而且可以在晴天利用太阳能来补充装置的电量,做到减少电能的消耗,绿色环保。
27.图像采集与处理:由于空气状况、日照变化、电磁等干扰,同时会受到噪声以及盲人行走时手杖的晃动的影响,会使采集到的图像变得模糊,因此在图像采集过程中我们采用双目红外摄像头。通过双目红外摄像头实时捕获盲人周围的环境图像,利用5g低延时、高速率、广传播的特点,将获取的图像经5g上传到云端服务器中,通过5g上传进行云计算,可以做到即时性,使盲人在行进过程中对于突发情况做到及时的反应。由于红绿灯的样式繁多复杂,因此我们通过卷积神经网络,用训练与学习的方法,采集出红绿灯的样本并存储,
进行特征标记后存入训练集。由于红绿灯外框基本为黑色,灰度值变化不大,用边缘跟踪的方法寻找出红绿灯的外围边框,再将样品的长度和宽度进行10等分,构成一个10*10均匀小区域,对于每一个小区域内的黑像素个数进行统计,除以该小区域的面积总数,所得值超过一个阈值标定为1,未超过的小区域标定为0,通过与样本目标对比,标定红绿灯以及各个灯的位置并标记存储坐标。
28.无线探测与测距:通过多个毫米波雷达传感器,用于盲点检测,防止盲人与障碍物之间的碰撞,同时当识别出红绿灯时,通过高精地图来识别路况,进一步确定红绿灯的位置,并通过毫米波雷达传感器来测出盲人与红绿灯之间的距离,从而实现对于红绿灯的定位,并标记处各个灯的位置。通过大量的实践计算,取出马路一边与另一边红绿灯的距离,当毫米波雷达检测的距离接近实践测试值时,会通过骨传导的方式告知盲人即将穿过马路。
29.识别红绿灯状态:利用双摄红外摄像头获取盲人周围的环境图像,从图像中取出红绿灯的图案,用这些图案构建深度学习模型。当识别出盲人前方的红绿灯时,将拍摄的红绿灯图像与深度学习模型中的图像进行比对,由于视角的差异,每一个图像的信号灯位置可能都不一样,深度学习模型也会在一定程度上扩大识别范围,确保红绿灯可以被真正的识别到。当匹配到高度相似的图像时,就可以判断出红绿灯此时是红色还是绿色,最后将所分析的结果调用为所分析结果相对应的语音数据。在深度学习模块中,我们将红绿灯的计时图像也纳入到学习模块中进行训练,当红绿灯进入倒计时的时候,会将所分析的时间结果以及毫米波雷达探测的道路宽度进行计算,从而计算出此时通过马路需要的最小速度。经过实际调查,正常盲人的行走速度大约为0.5m/s,再将所求出的最小速度与正常盲人的速度进行对比。当所求速度小于盲人速度时,语音提示为“可以前进”;当所求速度大于盲人速度时,语音提示为“还需等待”,最后将所计算的结果通过语音播报的方式告知盲人,从而避免盲人在穿过马路的过程中,绿灯突然变成红灯的危险情况。由于马路上的噪音很大,有可能导致语音提示不清楚,因此我们通过骨传导的方式将分析结果语音播报给盲人,让盲人做到即停即走,保障其出行安全。
30.(1)目前在针对盲人导盲的措施中具有两大类:一种是导盲犬,另一种是导盲杖。然而导盲犬的价格昂贵并且需要投入大量时间和精力去训练,无形之中给盲人以及盲人的家属造成相对应的麻烦。另外现有的导盲杖只能做到道路障碍物的识别,对于盲人出行的安全无法做到全方位的保障。本发明采用较低的成本,通过采用5g、卷积神经网络、毫米波雷达探测等技术全方位地解决了盲人的出行安全。
31.(2)本发明采用了5g技术,通过5g的高速率传输,将采取的道路信息图像及时上传到云端服务器,从而快速分析出图像中的红绿灯,高效地实现了图像的传输,做到了即时性。
32.(3)在现有的颜色判别模块中,会受到空气状况、日照变化、电磁等干扰,同时会受到噪声以及盲人行走时手杖的晃动的影响,会使采集到的图像变得模糊,导致识别的结果不够真实,但是本发明巧妙地使用深度学习模块,通过采集红绿灯的样本进行存储,进行特征标记并存入训练集,最后不断地对所获取的图像进行比对,使之能准确地识别出红绿灯的状态,并且通过测量的道路宽度以及识别出红绿灯的时间,求出此时通过马路的最小速度,再与盲人的速度进行比对,从而告知盲人是否能通过马路,进而保障盲人的出行安全。
33.本发明实用性高,除了盲人之外,色盲色弱人群同样可以使用;操作简单,仅仅通过手杖的手柄处的两个按钮,就可以实现手杖的伸长以及功能的启动。在盲人出行的时候,不再需要家人陪同,也不需要导盲犬的指引,可以通过这一导盲手架,进行障碍物的检测和红绿灯状态的判断,从而实现盲人的安全出行。不仅可以跟现有的导盲杖一样可以测出前方是否具有障碍物,而且还可以探测出红绿灯的状态,并且通过测量的道路宽度以及识别出红绿灯的时间,求出此时通过马路的最小速度,再与盲人的速度进行比对,进而告知此时是否能够通过马路。通过毫米波雷达探测做到及时的对道路情况做出反应,保障盲人能够安全通过马路。另外在手杖配有充电口的同时,还配有太阳能电池板,做到节约能源,绿色环保。
34.上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。