1.本发明涉及车载光伏设备领域,尤其涉及一种新型的光伏能量存储控制方法及其车载遮阳棚。
背景技术:
2.目前,房车市场在我国快速发展,由于房车的特殊用途及市场定位,房车的对电能的需求远大于一般汽车,但因蓄电池技术瓶颈以及地域限制,房车常常面临着用电紧张的困境。光伏发电利用半导体的光电效应将太阳能转换为电能供负载使用。由于光伏发电绿色、环保且不受地域限制等优点,其广泛应用于汽车、通信以及交通领域,能够缓解房车用电紧张的状况,但光伏发电存在间歇性且利用效率不高的问题制约了光伏设备在商业上的推广与应用。因此,发展应用于房车的光伏设备对于解决房车用电紧张的问题具有重要的意义。
3.现有能量储存控制方法多基于pid控制,pid控制作为一种经典控制算法,存在动态响应慢、超调大、带宽窄等问题,而在房车能量储存与使用中,光伏发电的间歇性与负载的即插即用涉及系统的动态过程。因此,采用基于pid控制器的方案存在许多局限。
技术实现要素:
4.为了解决上述技术问题,本发明的目的是提供一种新型的光伏能量存储控制方法及其车载遮阳棚,该方法能够大大减少控制器的计算量,提高控制效率,该车载遮阳棚具有较高的便利性和可行性。
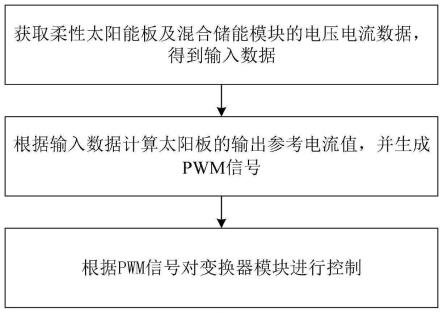
5.本发明所采用的第一技术方案是:一种新型的光伏能量存储控制方法,包括以下步骤:
6.获取柔性太阳能板及混合储能模块的电压电流数据,得到输入数据;
7.根据输入数据计算太阳板的输出参考电流值,并生成pwm信号;
8.根据pwm信号对变换器模块进行控制。
9.进一步,所述基于最大功率点跟踪控制方法,对输入数据进行处理,得到pwm信号这一步骤,其具体包括:
10.根据输入数据计算柔性太阳能板的输出功率并定义系统误差;
11.根据实际需求和光伏电池的输出曲线得到触发条件;
12.在光伏控制器中,判断到系统误差符合触发条件,mppt控制器工作,更新输出电流参考值信号并由模型预测控制器计算得到pwm信号,判断到系统误差不符合触发条件,mppt控制器不工作,保持上一时刻的输出电流参考值信号并由模型预测控制器计算得到pwm信号;
13.在混合储能系统控制器中,判断到系统误差符合触发条件,模型预测控制器工作,更新输出电流参考值信号并由滞环控制器计算得到pwm信号,判断到系统误差不符合触发条件,模型预测控制器不工作,保持上一时刻的输出电流参考值信号,由滞环控制器计算得
到pwm信号。
14.进一步,光伏控制器的触发条件表示如下:
[0015][0016]
上式中,e
pv,i
(k)表示光伏控制系统误差,p表示输出功率,ui表示第i个太阳能板的输出电压,t表示环境温度,λ表示调节因子。
[0017]
进一步,混合储能系统控制器触发条件表示如下:
[0018]
||e
hess
(t)||≤αγ-1
||x(t)||
[0019]
上式中,||ehess(t)||和||x(t)||为相应变量的范数,α和γ为κ类函数。
[0020]
本发明所采用的第二技术方案是:一种车载遮阳棚,包括卷轴、柔性太阳能板、遮阳布、变换器模块和混合储能模块,所述卷轴与遮阳布连接,所述遮阳布的下表面设置有可伸缩的金属屈臂,所述遮阳布的上表面安装有柔性太阳能板,所述柔性太阳能板与变换器模块连接,所述变换器模块与混合储能模块连接。
[0021]
进一步,所述卷轴包括转轴、安装板、金属外壳和蜗轮,所述转轴与遮阳布的固定端相连接,所述安装板固定安装在汽车的外侧,所述金属外壳与安装板连接,所述金属外壳的内部设有放置仓,所述蜗轮安装在金属外壳的侧面。
[0022]
进一步,所述柔性太阳能板包括防水接线口和柔性太阳能电池组件,所述防水接线口将柔性太阳能电池组件串并联后与变换器相连。
[0023]
进一步,所述变换器模块包括单电感-多输入单输出boost变换器、双向变换器、控制器和传感器,所述单电感-多输入单输出boost变换器的输入端与太阳能板连接,所述单电感-多输入单输出boost变换器的输出端与负载连接,所述控制器的输入端与传感器的输出端连接,所述控制器的输出端分别与单电感-多输入单输出boost变换器的输入端和双向变换器的输入端相连。
[0024]
进一步,所述混合储能模块包括蓄电池、电容和负载,所述蓄电池通过双向变换器与负载连接,所述电容通过双向变换器与负载连接。
[0025]
本发明的有益效果是:本发明在车载式遮阳棚上设置柔性太阳能板,极大地增大了光照面积,提高了蓄电池的充电功率,且易于收纳放置、操作简单可行,通过采用单电感、多输入单输出的电路拓扑结构,大大减少了元件的数量,从而降低成本;此外,该新型最大功率点跟踪控制(mppt)方法可降低柔性太阳能板局部遮挡对光伏设备发电功率的不利影响,有效减少输出功率波动,并能够大大减少控制器的计算量,提高控制效率。
附图说明
[0026]
图1是本发明一种新型的光伏能量存储控制方法的步骤流程图;
[0027]
图2是本发明一种车载遮阳棚的结构示意图;
[0028]
图3是本发明具体实施例的部分电路示意图;
[0029]
图4是本发明具体实施例光伏控制器的流程框图;
[0030]
图5是本发明具体实施例混合储能控制器的流程框图;
[0031]
附图说明:1、安装板;2、通槽;3、金属外壳;4、卷轴;5、扣环;6、金属屈臂;7、柔性太阳能板;8、遮阳布;10、支撑杆;11、蜗轮;12、蓄电池;13、电容。
具体实施方式
[0032]
下面结合附图和具体实施例对本发明做进一步的详细说明。对于以下实施例中的步骤编号,其仅为了便于阐述说明而设置,对步骤之间的顺序不做任何限定,实施例中的各步骤的执行顺序均可根据本领域技术人员的理解来进行适应性调整。
[0033]
参照图1,本发明提供了一种新型的光伏能量存储控制方法,该方法包括以下步骤:
[0034]
s1、获取柔性太阳能板及混合储能模块的电压电流数据,得到输入数据;
[0035]
s2、根据输入数据计算太阳板的输出参考电流值,并生成pwm信号;
[0036]
s2.1、根据输入数据计算柔性太阳能板的输出功率并定义系统误差;
[0037]
具体地,通过传感器测量各块柔性太阳能板输出端的电压u和电流i,计算得到此时柔性太阳能板的输出功率p=ui,定义此时系统误差:
[0038][0039]
因为最大功率点处故
[0040][0041]
s2.2、根据实际需求和光伏电池的输出曲线得到触发条件;
[0042]
具体地,光伏控制器器触发条件表示如下:
[0043][0044]
上式中,e
pv,i
(k)表示光伏控制系统误差,p表示输出功率,ui表示第i个太阳能板的输出电压,t表示环境温度,λ表示调节因子。
[0045]
单电感-多输入单输出boost变换器的离散时间状态空间方程为:
[0046][0047][0048][0049]
其中,ts为系统的采样时间;u
out
,i
out
为单电感-多输入单输出boost变换器输出电压、电流;l为单电感的大小;c为滤波电容大小;q为单电感-多输入单输出boost变换器的开关状态;为单电感-多输入单输出boost变换器的输入电压,qj,vj分别为太阳能板的各自的开关器件的开关状态和输出电压。
[0050]
根据移相平均滤波器的思想,对离散时间状态空间方程多次迭代计算可得u
out
(k m),u
out
(k 2m)
…uout
(k nm)。其中n,m为自然数,此处取n=5,m=3;设计评价函数为:
[0051]
混合储能系统离散时间状态空间模型为:
[0052][0053]
其中:
[0054][0055]
设计评价函数为:j2(k,x)=u(k)
t
ru(k) (y(k)-y
*
)
t
g(y(k)-y
*
) j(k 1,ax bu)
[0056]
其中v
bat
、v
sc
表示蓄电池、超级电容的电压,i
batref
、i
scref
、i
dcbus
分别表示蓄电池、超级电容以及直流侧的电流参考值,i
lastbatref
、i
lastscref
分别表示蓄电池、超级电容上一时刻的电流参考值,r、g矩阵表示权重矩阵。
[0057]
事件触发控制器用于减少不必要的计算量,与光伏发电系统类似,设计另一个事件触发控制器来减少模型预测控制的计算量,它的设计过程如下所示:
[0058]ehess
(t)=x(t)-x(ti)
[0059][0060]
其中,x(t)为混合储能系统当前时刻的观测量,x(ti)为上一次事件触发时混合储能系统的观测量,t
et
为事件触发控制器预设的采样时间。
[0061]
根据事件触发控制理论,为保证控制系统的输入状态稳定,误差e
hess
(t)需要满足:
[0062]
||e
hess
(t)||≤αγ-1
||x(t)||
[0063]
其中||e
hess
(t)||和||x(t)||为相应变量的范数,α和γ为κ类函数。
[0064]
由混合储能系统离散时间状态空间方程可得:
[0065][0066]
||a1x(t)|| ||b1u(t)||=||a1x(ti)-a1e
hess
(t)|| ||b1u(ti)||≤||a1e
hess
(t)|| ||a1x(ti)|| ||b1u(ti)||≤||a1||||e
hess
(t)|| ||a1x(ti)|| ||b1u(ti)||
[0067]
通过定义ψ(t)=||e
hess
(t)|| (||a1x(ti)|| ||b1u(ti)||)||a1||-1
,可得到:
[0068][0069]
注意到e
hess
(ti)=0,因此ψ(ti)=(||a1x(ti)|| ||b1u(ti)||)||a1||-1
[0070][0071]
故可得到如下不等式:
[0072][0073]
最终得到混合储能系统的触发条件为:
[0074]
其中系数λ、t
et
可被用于调节平衡系统表现性能与计算量。
[0075]
s2.3、在光伏控制器中,判断到系统误差符合触发条件,mppt控制器工作,更新输
出电流参考值信号并由模型预测控制器计算得到pwm信号,判断到系统误差不符合触发条件,mppt控制器不工作,保持上一时刻的输出电流参考值信号并由模型预测控制器计算得到pwm信号;
[0076]
s2.4、在混合储能系统控制器中,判断到系统误差符合触发条件,模型预测控制器工作,更新输出电流参考值信号并由滞环控制器计算得到pwm信号,判断到系统误差不符合触发条件,模型预测控制器不工作,保持上一时刻的输出电流参考值信号,由滞环控制器计算得到pwm信号。
[0077]
具体地,事件触发控制器采集电流电压信号,通过计算比较系统误差与所设计的触发条件决定是否触发模型预测控制器。若达到触发条件,则模型预测控制器开始工作,更新控制器的输出信号;若未能达到触发条件,则模型预测控制器被挂起,控制器的输出信号与上一时刻的输出信号保持一致,从而达到减少控制器计算量的目的。
[0078]
迭代学习控制器采用pd型迭代学习控制律,即:
[0079]un 1
(k)=un(k) k
pen
(k) kd(e
n 1
(k)-en(k))
[0080]en 1
(k)=i
dcbusref
(k)-i
dcbus
(k),
[0081][0082][0083]
其中g
p
,gd分别为比例学习增益和微分学习增益,一般情况下gd比g
p
大几个数量级。
[0084]
具体地,迭代学习控制器属于混合储能控制器的一部分,用来计算可维持混合储能系统直流侧电压稳定的直流电流参考值。迭代学习控制器包括pid控制器及迭代学习律两部分,直流母线侧电压参考值与直流母线侧电压实际值相减得到系统误差e(k),经过限幅处理后,经过迭代学习律计算,得到输出u
k,ilc
,而pid控制器的输出为u
k,pid
,最后得到迭代学习控制器的输出为uk=u
k,pid
u
k,ilc
,本例中uk为直流母线侧电流参考值i
dcbusref
。
[0085]
s3、根据pwm信号对变换器模块进行控制。
[0086]
具体地,柔性太阳能板及混合储能模块的电压电流数据通过传感器实时传输到控制器,控制器根据相应的控制算法对输出电压电流数据进行在线处理后得到pwm信号,控制器的信号输出端将pwm信号传输到各个变换器的信号输入端。
[0087]
如图2所示,一种车载遮阳棚,包括卷轴4、柔性太阳能板7、遮阳布8、变换器模块和混合储能模块,所述卷轴4与遮阳布8连接,所述遮阳布8的下表面设置有可伸缩的金属屈臂6,所述卷轴4包括转轴、安装板1、金属外壳3和蜗轮12,所述转轴与遮阳布8的固定端相连接,所述安装板1固定安装在汽车的外侧,所述金属外壳3与安装板1连接,所述金属外壳3的内部设有放置仓,所述蜗轮12安装在金属外壳3的侧面,所述遮阳布8的上表面安装有柔性太阳能板7,所述柔性太阳能板7与变换器模块连接,所述变换器模块与混合储能模块连接。
[0088]
具体地,所述放置仓用于存放柔性太阳能板7及遮阳布8,使用时,使用者在地面上利用摇杆对蜗轮的扣环5进行旋转,柔性太阳能板7与遮阳布8从通槽2中滑出至完全展开状态。此过程中,安装在金属外壳3下方的金属屈臂6由收纳时的折叠状态逐渐伸直对遮阳布8进行支撑。另外,为缓解金属屈臂6的支撑压力,延长其使用寿命,待遮阳布8完全展开后,支
撑杆10安装在遮阳布8的活动侧的两角进行支撑。
[0089]
进一步作为优选实施例,所述柔性太阳能板包括防水接线口和柔性太阳能电池组件,所述防水接线口将柔性太阳能电池组件串并联后与变换器相连。
[0090]
进一步作为优选实施例,参照图2,该电路图包括混合储能模块与变换器模块,所述变换器模块包括单电感-多输入单输出boost变换器、双向变换器、控制器和传感器,所述单电感-多输入单输出boost变换器的输入端与太阳能板连接,所述单电感-多输入单输出boost变换器的输出端与负载连接,所述控制器的输入端与传感器的输出端连接,所述控制器的输出端分别与单电感-多输入单输出boost变换器的输入端和双向变换器的输入端相连,所述混合储能模块包括蓄电池13、电容14和负载,所述蓄电池13通过双向变换器与负载连接,所述电容14通过双向变换器与负载连接。
[0091]
具体地,混合储能模块用于提高直流侧的电能质量,蓄电池13具有高能量密度、低功率密度的特点,所述电容14为超级电容,具有高功率密度、低能量密度的特点。蓄电池13和超级电容14通过变换器与直流侧相连,直流侧电压为72v,蓄电池13及超级电容14的额定电压均为36v。该房车太阳能遮阳棚处于收纳状态时,负载用电全由混合储能模块提供。在房车太阳能遮阳棚工作时,产生的电能先供给直流侧负载,缺额(或盈余)功率由混合储能模块补足(或吸收)。由于负载跳变及光伏发电功率波动而出现直流侧功率波动时,控制器通过电流电压数据计算出当前直流侧功率缺额或盈余部分,并将不匹配的功率部分按照控制规则分配给混合储能模块,混合储能模块中的蓄电池响应波动功率中的低频功率部分,而超级电容则响应波动功率中的高频功率部分,从而保持直流侧电压的稳定,提高供电质量。
[0092]
参照图4,单电感-多输入单输出boost变换器的占空比与各自的电流参考值有关,电流参考值由控制器根据各个太阳能板的电流电压情况,由最大功率跟踪法计算得到;实际电流需经过移动平均滤波器(moving average filter,maf)处理后与电流参考值相减得到误差值;与直流侧相连的变换器的占空比由模型预测控制器计算得到。其中,i
ref,1
,i
ref,2
…iref,n-1
为各柔性太阳能板的输出电流参考值;i1,i2…in-1
为各柔性太阳能板的输出电流实际值;q1,q2…qn
为各多输入端口的占空比,q
′
与q为两个互补的开关器件的占空比。
[0093]
参照图4,该混合储能模块控制器包括事件触发控制器、模型预测控制器、迭代学习控制器以及滞环控制器。事件触发控制器用于减少模型预测控制器的计算次数;迭代学习控制器产生直流侧参考电流值;模型预测控制器产生蓄电池与超级电容的输出电流参考值;滞环控制器将实际输出电流与电流参考值进行比较产生控制信号。
[0094]
参照图5,该混合储能模块控制器包括事件触发控制器、模型预测控制器、迭代学习控制器以及滞环控制器。事件触发控制器用于减少模型预测控制器的计算次数;迭代学习控制器产生直流侧参考电流值;模型预测控制器产生蓄电池与超级电容的输出电流参考值;滞环控制器将实际输出电流与电流参考值进行比较产生pwm信号。
[0095]
迭代学习控制器包括pid控制器及迭代学习律两部分,直流母线侧电压参考值与直流母线侧电压实际值相减得到系统误差e(k),经过限幅处理后,经过迭代学习律计算,得到输出u
k,ilc
,而pid控制器的输出为u
k,pid
,最后得到迭代学习控制器的输出为uk=u
k,pid
u
k,ilc
,本例中uk为直流母线侧电流参考值i
dcbusref
。
[0096]
为保证多块太阳能板能够同时工作在各自的最大功率点附近,应用单电感-多输
入单输出boost变换器。各太阳能板的输出端与单电感-多输入单输出boost变换器的输入端相连,单电感-多输入单输出boost变换器的输出端连接直流侧负载。各个太阳能板的输出电流电压数据通过传感器传输到控制器的输入端,控制器通过最大功率点跟踪的控制方法计算出各个输入端口的电流参考值,并以此计算相应的开关器件的占空比,得到的占空比经过脉冲宽度调制后得到的开关控制信号输出至各个变换器的输入端。
[0097]
下面对本发明的工作过程进行详细描述:(1)房车停放时,使用手摇杆连接房车遮阳棚的蜗轮装置后,旋转手摇杆使遮阳布与柔性太阳能板从滑槽口滑出至完全展开。(2)房车遮阳棚布置完成后,在太阳照射情况下,柔性太阳能板开始工作,输出电流电压经过传感器传输到控制器。控制器根据电压电流数据计算得到各太阳能板的输出电流参考值,经过pi环节、逻辑处理得到占空比,占空比经过脉冲宽度调制后得到开关信号,所得开关信号通过控制器的信号输出端传输到各变换器的信号接收端对开关器件的开通关断进行控制,从而获得最大的光伏发电功率。光伏发电的电能将直接供给直流侧负载使用。(3)由于光照强度、温度等环境因素变化的不确定性,光伏发电功率会发生波动。在运行过程中,控制器通过收集光伏发电的电压电流、直流侧电压电流、蓄电池的电压电流和荷电状态(soc)以及超级电容的电压电流和soc等数据进行处理后得到对各个变换器的控制信号。其控制规则为:直流侧功率盈余,即光伏发电功率大于当前负载功率时,盈余功率的低频部分将由蓄电池吸收,高频部分将由超级电容吸收,反之亦然。因此,直流侧的功率不匹配的问题得以解决,从而能够保持直流侧电压的稳定。
[0098]
上述方法实施例中的内容均适用于本实施例中,本实施例所具体实现的功能与上述方法实施例相同,并且达到的有益效果与上述方法实施例所达到的有益效果也相同。
[0099]
以上是对本发明的较佳实施进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做作出种种的等同变形或替换,这些等同的变形或替换均包含在本技术权利要求所限定的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。