1.本发明属于导航技术领域,具体涉及一种复杂环境下的高精度定位方法。
背景技术:
2.随着经济技术的发展和人们生活水平的提高,定位和导航服务已经广泛应用于人们的生产和生活当中,给人们的生产和生活带来了无尽的便利。因此,保证定位和导航的精确性,就成为了研究人员的研究重点。
3.目前,在实际应用中,实际环境存在许多弱gnss(global navigation satellite system,全球导航卫星系统)信号或无gnss信号的区域,比如隧道、高架、车库等;在这些区域,如果单纯使用纯gnss定位,则定位系统无法实时提供高精度的定位结果。因此,目前一般采用融合多种传感器的综合定位方式,来保证实时定位的鲁棒性和高可靠性。
4.但是,目前的多源融合定位方法,一般都存在部分缺陷:目前采用的vio(visual-inertial odometry,视觉-惯性轨迹法)与gnss融合的方法,在无gnss信号区域,定位系统退化为纯vio系统,由于地面载体近似平面,单目vio系统会出现额外的不可观自由度,导致定位漂移;此外,目前的vio与gnss的融合多以松耦合或半紧组合为主,在复杂环境下无法提供高鲁棒的定位结果。
技术实现要素:
5.本发明的目的在于提供一种可靠性高、精确性好且鲁棒性好的复杂环境下的高精度定位方法。
6.本发明提供的这种复杂环境下的高精度定位方法,包括如下步骤:s1. 获取gnss传感器、vison视觉传感器、sins惯性传感器和wheel轮式里程计的原始观测数据,并对传感器数据进行预处理和同步;s2. 根据获取的传感器数据,进行vison/sins/wheel联合动态初始化;s3. 根据步骤s2的初始化结果,将视觉传感器数据、惯性传感器数据、轮式里程计数据与gnss传感器数据进行对齐;s4. 构建惯性传感器和轮式里程计的预积分模型;s5. 基于构建的预积分模型,将gnss原始观测残差、视觉残差、惯性预积分模型、轮式里程计模型和平面约束进行聚合,构建非线性残差模型;s6. 实时求解构建的非线性残差模型,完成复杂环境下的高精度定位。
7.所述的步骤s1,具体包括如下步骤:gnss传感器的原始观测数据包括卫星星历数据、载波相位原始观测数据、gnss基站差分数据、实时模糊度解算数据和多普勒原始观测数据;vison视觉传感器的原始观测数据为摄像头实时传输的灰度图像数据;sins惯性传感器的原始观测数据为imu输出数据;wheel轮式里程计的原始观测数据为车辆实时的左右轮转速数据;对gnss原始观测数据进行预处理,剔除异常数据;然后基于pps授时系统,对四种传感器数据进行时间同步。
8.所述的步骤s2,具体包括如下步骤:a. 在滑窗中,利用纯视觉sfm(structure from motion,运动恢复结构)方法,计算得到相对尺度的相机位姿和特征点坐标;b. 根据步骤a得到的计算结果,标定陀螺仪的零漂值;c. 根据视觉、imu和轮式里程计的初始化速度、重力加速度和尺度因子,构建初始化向量;d. 利用当地的实际重力加速度,对步骤c构建的初始化向量进调整,并恢复到真实尺度并对齐,最终得到精确的局部世界坐标系下的初始化结果。
9.所述的步骤c,具体包括如下步骤:根据视觉、imu和轮式里程计的初始化速度、重力加速度和尺度因子,构建待初始化量为,其中为第k帧的imu坐标系下的速度,为第c0帧的重力加速度,s为尺度因子;然后,在滑窗中连续两帧满足如下方程1:然后,在滑窗中连续两帧满足如下方程1:然后,在滑窗中连续两帧满足如下方程1:式中为imu的位置预积分量;为c0相对第k帧imu的旋转;为第k帧imu相对c0帧的位置;为两帧之间的时间间隔;为第k帧imu相对c0帧的旋转;为imu的速度预积分量;为轮式里程计的预积分量;为第k帧odom相对c0帧的旋转;为第k帧odom相对c0帧的位置;为第k帧odom的速度;将方程1写成待优化量的线性表达式,然后转换成求解线性最小二乘,得到最优的初始化量,完成速度、重力加速度和尺度因子的初始化。
10.所述的步骤s3,具体包括如下步骤:a. 基于载波相位双差模型,计算得到粗略的锚点位置;b. 根据vison/sins/wheel联合动态初始化的结果、多普勒观测值和卫星的速度,计算得到enu坐标系与局部世界坐标系之间的偏航角;c. 根据vison/sins/wheel联合动态初始化的结果,对齐局部世界坐标系与全局ecef坐标系,完成对锚点位置的精调。
11.所述的步骤a,具体包括如下步骤:求解以下模型,计算得到全局ecef坐标系中的粗略锚点位置:
式中为接收机与基站对第i颗卫星的载波相位观测之差与第j颗卫星的载波相位观测之差的差值;为载波波长;为基站对卫星i的观测矢量;b
ur
为接收机当前位置与基站位置的相对偏差,为待求解的量;为第i颗卫星与第j颗卫星观测的整周模糊度的差值;n为滑窗的大小;k为滑窗序号;m为第k个滑窗中载波相位原始观测量数目;为马氏范数。
12.所述的步骤b,具体包括如下步骤:求解以下模型,计算得到偏航角:求解以下模型,计算得到偏航角:式中为接收机频漂;为载波波长;fd为多普勒原始观测量;为接收机对卫星i的观测矢量;为第i颗卫星的速度;为局部世界坐标系到enu坐标系的转换关系;为局部世界坐标系到enu坐标系的转换关系;vw为局部世界坐标系下的载体速度;为第i颗卫星的频漂;n为滑窗的大小;k为滑窗序号;m为第k个滑窗中载波相位原始观测量数目;为马氏范数;yaw为偏航角。
13.所述的步骤c,具体包括如下步骤:求解以下模型,计算得到精确的锚点位置,完成局部世界坐标系与全局ecef坐标系的对齐:式中为锚点的粗略坐标;为基站对卫星i的观测矢量;为载波波长;为局部世界坐标系到ecef坐标系的转换关系;pw为局部世界坐标系下的载体位置;为基站的坐标;为第i颗卫星与第j颗卫星观测的整周模糊度的差值;为接收机与基站对第i颗卫星的载波相位观测之差与第j颗卫星的载波相位观测之差的差值;n为滑窗的
大小;k为滑窗序号;m为第k个滑窗中载波相位原始观测量数目;为马氏范数。
14.所述的步骤s4,具体包括如下步骤:根据imu预积分模型,计算得到两帧之间imu预积分量模型如下:两帧之间imu预积分量模型如下:两帧之间imu预积分量模型如下:两帧之间imu预积分量模型如下:式中为位置预积分量;bk为k时刻的imu;为t时刻相对于bk的旋转量;为加速度计的输出值;b
at
为加速度计的零漂;na为加速度计的高斯白噪声;为角速度计的输出值;为角速度计的零漂;为角速度计的高斯白噪声;为t时刻相对于bk的旋转量;tk为k时刻;为速度预积分量;为旋转预积分量;表示叉积。
15.根据线速度和角速度建模,得到轮式里程计的预积分模型如下:根据线速度和角速度建模,得到轮式里程计的预积分模型如下:式中为位置预积分量;ok为k时刻的odom;为t时刻相对于ok的旋转量;为线速度;nv为线速度的高斯白噪声;为旋转预积分量;为偏航角速度;为偏航角速度的高斯白噪声;为t时刻相对于ok的旋转。
16.所述的步骤s5,具体包括如下步骤:采用如下算式作为非线性残差模型:
式中x为待优化的估计量;为边缘化后的先验信息;r
p
为边缘化残差;h
p
为边缘化更新矩阵;为马氏距离;n为残差约束数量;为传感器测量值的残差函数;当传感器为sins惯性传感器时,取值为:式中为位置增量;为速度增量;为角度增量;为加速度计bias增量;为角速度计bias增量;为局部世界坐标到第k帧imu的旋转;为第k帧imu在局部世界坐标下的位置;为第k帧imu在局部世界坐标系下的速度;为两帧之间的时间间隔;gw为重力加速度;为位置预积分量;为速度预积分量;为第k帧imu坐标到局部世界坐标的旋转量;为旋转预积分量;为四元素的虚部;为第k帧的加速度零漂;为第k帧陀螺仪的零漂;为四元素乘法;当传感器为wheel轮式里程计时,取值为:
式中为位置增量;为角度增量;为局部世界坐标到第k帧odom的旋转;为第k帧轮速里程计在局部世界坐标下的位置;为第k帧轮速里程计在局部世界坐标系下的;为位置预积分量;为第k帧轮速里程计坐标到局部世界坐标的旋转量;为旋转预积分量;当传感器为vision视觉传感器时,取值为:式中为第j个相机坐标系路标点的归一化相机坐标;为第j个相机坐标系下路标点三维坐标;x
cj
、y
cj
和z
cj
的计算公式为,式中为相机与imu坐标系的旋转参数,为局部世界坐标到第j帧imu的旋转,为第i帧 imu到局部世界坐标系的旋转量,为相机到imu的旋转,为逆深度值,为相机与imu的平移参数,为第i帧imu在局部世界坐标系的坐标,为局部世界坐标系与第j帧imu平移,为imu与相机坐标系的平移参数;当传感器为gnss传感器时,取值为:
式中为载波波长;为第i颗卫星的观测矢量;为接收机的ecef坐标;为第i颗卫星与第j颗卫星观测的整周模糊度的差值;为接收机与基站对第i颗卫星的载波相位观测之差与第j颗卫星的载波相位观测之差的差值;为基准站的ecef坐标,且,为局部世界坐标系到enu坐标系的转换关系;为局部世界坐标系到enu坐标系的转换关系,为第k帧imu坐标在局部世界坐标系下的位置,为锚点坐标;需要随机平面约束因子时,取值为:式中为设定的矩阵,且;为odom到imu坐标系的旋转量;为imu在局部世界坐标系的姿态;为局部世界坐标系到虚拟平面的旋转量;e3为设定的矩阵,且;为imu在局部世界坐标系的位置;为odom到imu坐标系的平移量;为roll角度;为pitch角度;为的高斯噪声,为局部世界坐标到虚拟平面的高度值。
17.本发明提供的这种复杂环境下的高精度定位方法,通过创新的定位方法流程设计以及创新的多传感器融合计算过程,不仅实现了复杂环境下的高精度定位过程,而且本发明方法的可靠性高、精确性好且鲁棒性好。
附图说明
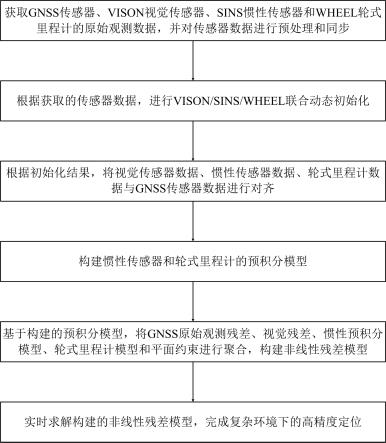
18.图1为本发明的方法流程示意图。
19.图2为本发明实施例中的现有高精度定位轨迹与真值轨迹的对比示意图。
20.图3为本发明实施例中的本发明定位轨迹与真值轨迹的对比示意图。
21.图4为本发明实施例中的现有高精度定位方法和本发明方法在x方向上的误差对比示意图。
22.图5为本发明实施例中的现有高精度定位方法和本发明方法在y方向上的误差对
比示意图。
23.图6为本发明实施例中的现有高精度定位方法和本发明方法在z方向上的误差对比示意图。
具体实施方式
24.如图1所示为本发明的方法流程示意图:本发明提供的这种复杂环境下的高精度定位方法,包括如下步骤:s1. 获取gnss传感器、vison视觉传感器、sins惯性传感器和wheel轮式里程计的原始观测数据,并对传感器数据进行预处理和同步;具体包括如下步骤:gnss传感器的原始观测数据包括卫星星历数据、载波相位原始观测数据、gnss基站差分数据、实时模糊度解算数据和多普勒原始观测数据;vison视觉传感器的原始观测数据为摄像头实时传输的灰度图像数据;sins惯性传感器的原始观测数据为imu输出数据;wheel轮式里程计的原始观测数据为车辆实时的左右轮转速数据;对gnss原始观测数据进行预处理,剔除异常数据;然后基于pps授时系统,对四种传感器数据进行时间同步;s2. 根据获取的传感器数据,进行vison/sins/wheel联合动态初始化;具体包括如下步骤:a. 在滑窗中,利用纯视觉sfm(structure from motion,运动恢复结构)方法,计算得到相对尺度的相机位姿和特征点坐标;b. 根据步骤a得到的计算结果,标定陀螺仪的零漂值;c. 根据视觉、imu和轮式里程计的初始化速度、重力加速度和尺度因子,构建初始化向量;具体包括如下步骤:根据视觉、imu和轮式里程计的初始化速度、重力加速度和尺度因子,构建待初始化量为,其中为第k帧的imu坐标系下的速度,为第c0帧的重力加速度,s为尺度因子;然后,在滑窗中连续两帧满足如下方程1:然后,在滑窗中连续两帧满足如下方程1:然后,在滑窗中连续两帧满足如下方程1:式中为imu的位置预积分量;为c0相对第k帧imu的旋转;为第k帧imu相对c0帧的位置;为两帧之间的时间间隔;为第k帧imu相对c0帧的旋转;为imu的速度预积分量;为轮式里程计的预积分量;为第k帧odom相对c0帧的旋转;
为第k帧odom相对c0帧的位置;为第k帧odom的速度;将方程1写成待优化量的线性表达式,然后转换成求解线性最小二乘,得到最优的初始化量,完成速度、重力加速度和尺度因子的初始化;d. 利用当地的实际重力加速度,对步骤c构建的初始化向量进调整,并恢复到真实尺度并对齐,最终得到精确的局部世界坐标系下的初始化结果;s3. 根据步骤s2的初始化结果,将视觉传感器数据、惯性传感器数据、轮式里程计数据与gnss传感器数据进行对齐;具体包括如下步骤:a. 基于载波相位双差模型,计算得到粗略的锚点位置;具体包括如下步骤:求解以下模型,计算得到全局ecef坐标系中的粗略锚点位置:式中为接收机与基站对第i颗卫星的载波相位观测之差与第j颗卫星的载波相位观测之差的差值;为载波波长;为基站对卫星i的观测矢量;b
ur
为接收机当前位置与基站位置的相对偏差,为待求解的量;为第i颗卫星与第j颗卫星观测的整周模糊度的差值;n为滑窗的大小;k为滑窗序号;m为第k个滑窗中载波相位原始观测量数目;为马氏范数;b. 根据vison/sins/wheel联合动态初始化的结果、多普勒观测值和卫星的速度,计算得到enu坐标系与局部世界坐标系之间的偏航角;具体包括如下步骤:求解以下模型,计算得到偏航角:求解以下模型,计算得到偏航角:式中为接收机频漂;为载波波长;fd为多普勒原始观测量;为接收机对卫星i的观测矢量;为第i颗卫星的速度;为局部世界坐标系到enu坐标系的转换关系;为局部世界坐标系到enu坐标系的转换关系;vw为局部世界坐标系下的载体速度;为第i颗卫星的频漂;n为滑窗的大小;k为滑窗序号;m为第k个滑窗中载波相位原始观测量数目;为马氏范数;yaw为偏航角;c. 根据vison/sins/wheel联合动态初始化的结果,对齐局部世界坐标系与全局
ecef坐标系,完成对锚点位置的精调;具体包括如下步骤:求解以下模型,计算得到精确的锚点位置,完成局部世界坐标系与全局ecef坐标系的对齐:式中为锚点的粗略坐标;为基站对卫星i的观测矢量;为载波波长;为局部世界坐标系到ecef坐标系的转换关系;pw为局部世界坐标系下的载体位置;为基站的坐标;为第i颗卫星与第j颗卫星观测的整周模糊度的差值;为接收机与基站对第i颗卫星的载波相位观测之差与第j颗卫星的载波相位观测之差的差值;n为滑窗的大小;k为滑窗序号;m为第k个滑窗中载波相位原始观测量数目;为马氏范数;s4. 构建惯性传感器和轮式里程计的预积分模型;具体包括如下步骤:根据imu预积分模型,计算得到两帧之间imu预积分量模型如下:根据imu预积分模型,计算得到两帧之间imu预积分量模型如下:根据imu预积分模型,计算得到两帧之间imu预积分量模型如下:根据imu预积分模型,计算得到两帧之间imu预积分量模型如下:式中为位置预积分量;bk为k时刻的imu;为t时刻相对于bk的旋转量;为加速度计的输出值;b
at
为加速度计的零漂;na为加速度计的高斯白噪声;为角速度计的输出值;为角速度计的零漂;为角速度计的高斯白噪声;为t时刻相对于bk的旋转量;tk为k时刻;为速度预积分量;为旋转预积分量;表示叉积;根据线速度和角速度建模,得到轮式里程计的预积分模型如下:
式中为位置预积分量;ok为k时刻的odom;为t时刻相对于ok的旋转量;为线速度;nv为线速度的高斯白噪声;为旋转预积分量;为偏航角速度;为偏航角速度的高斯白噪声;为t时刻相对于ok的旋转;s5. 基于构建的预积分模型,将gnss原始观测残差、视觉残差、惯性预积分模型、轮式里程计模型和平面约束进行聚合,构建非线性残差模型;具体包括如下步骤:采用如下算式作为非线性残差模型:式中x为待优化的估计量;为边缘化后的先验信息;r
p
为边缘化残差;h
p
为边缘化更新矩阵;为马氏距离;n为残差约束数量;为传感器测量值的残差函数;当传感器为sins惯性传感器时,取值为:式中为位置增量;为速度增量;为角度增量;为加速度计
bias增量;为角速度计bias增量;为局部世界坐标到第k帧imu的旋转;为第k帧imu在局部世界坐标下的位置;为第k帧imu在局部世界坐标系下的速度;为两帧之间的时间间隔;gw为重力加速度;为位置预积分量;为速度预积分量;为第k帧imu坐标到局部世界坐标的旋转量;为旋转预积分量;为四元素的虚部;为第k帧的加速度零漂;为第k帧陀螺仪的零漂;为四元素乘法;当传感器为wheel轮式里程计时,取值为:式中为位置增量;为角度增量;为局部世界坐标到第k帧odom的旋转;为第k帧轮速里程计在局部世界坐标下的位置;为第k帧轮速里程计在局部世界坐标系下的;为位置预积分量;为第k帧轮速里程计坐标到局部世界坐标的旋转量;为旋转预积分量;当传感器为vision视觉传感器时,取值为:式中为第j个相机坐标系路标点的归一化相机坐标;为第j个相机坐标系下路标点三维坐标;x
cj
、y
cj
和z
cj
的计算公式为,式中为相机与imu坐标
系的旋转参数,为局部世界坐标到第j帧imu的旋转,为第i帧 imu到局部世界坐标系的旋转量,为相机到imu的旋转,为逆深度值,为相机与imu的平移参数,为第i帧imu在局部世界坐标系的坐标,为局部世界坐标系与第j帧imu平移,为imu与相机坐标系的平移参数;当传感器为gnss传感器时,取值为:式中为载波波长;为第i颗卫星的观测矢量;为接收机的ecef坐标;为第i颗卫星与第j颗卫星观测的整周模糊度的差值;为接收机与基站对第i颗卫星的载波相位观测之差与第j颗卫星的载波相位观测之差的差值;为基准站的ecef坐标,且,为局部世界坐标系到enu坐标系的转换关系;为局部世界坐标系到enu坐标系的转换关系,为第k帧imu坐标在局部世界坐标系下的位置,为锚点坐标;需要随机平面约束因子时,取值为:式中为设定的矩阵,且;为odom到imu坐标系的旋转量;为imu在局部世界坐标系的姿态;为局部世界坐标系到虚拟平面的旋转量;e3为设定的矩阵,且;为imu在局部世界坐标系的位置;为odom到imu坐标系的平移量;为roll角度;为pitch角度;为的高斯噪声,为局部世界坐标到虚拟平面的高度值;
具体实施时,n取值是否就是5,n=1~5时,分别对应于imu残差因子、轮式里程计残差因子、视觉重投影残差因子、载波相位双差测量因子和随机平面约束因子;s6. 实时求解构建的非线性残差模型,完成复杂环境下的高精度定位。
25.以下结合一个实施例,对本发明的复杂环境高境地定位方法进行进一步说明:本实例基于小觅d1000-ir-120相机和自研卫星信号接收机采集图像、imu、gnss原始观测量,基于网络tcp方式接收gnss差分数据,基于odb方式接收车载轮速里程计数据,图像数据接收频率为30hz,只用左目数据,imu数据接收频率为200hz,gnss原始观测量和差分数据接收频率为1hz,轮速里程计数据接收频率为30hz,所有数据已经过相关工具同步处理并发布成ros格式。将硬件安装好标定好后,围绕楼栋密集区域的复杂环境和车库录制30分钟左右数据,并基于本发明方法与现有高精度定位方法进行对比。图2为现有高精度定位轨迹与真值轨迹对比情况,图中,1号轨迹为真值,2号轨迹为高精度定位结果;图3为本发明的定位轨迹与真值轨迹对比情况,图中,1号轨迹为真值,3号轨迹为本发明的定位结果。从图2中可以明显看到,采用现有的高精度定位方法定位时,轨迹1和轨迹2依旧存在部分区段有明显的分离痕迹,表明定位结果并不令人满意;而在图3中,采用本发明方法进行定位时,轨迹1和轨迹3几乎一直处于重叠状态,因此表明本发明方法的精度确实较高。
26.分别将现有高精度定位方法和本发明方法的坐标值,与真值相减得到x/y/z方向上的误差值,图4为高精度定位方法和本发明方法在x方向上的误差对比情况,图5为高精度定位方法和本发明方法在y方向上的误差对比情况,图6为高精度定位方法和本发明方法在z方向上的误差对比情况,从图可以看出,基于本发明的定位方法的误差值在x、y、z方向上都远远小于现有高精度定位方法,说明基于本发明的定位方法能大幅提升在复杂环境下的定位精度。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。