1.本发明涉及卫星导航技术领域。具体而言,涉及一种应用卫星定位的无路径导航算法与系统。
背景技术:
2.随着人类对地球土地的开发和利用越加频繁,覆盖的范围在近年大幅上升,人们对于在未知土地上的移动交通规划的需求也随之大幅上升。然而在大部分未建设道路或者道路系统不成熟的区域内进行路径规划是不现实的,并且随着土路的不断发展,已知的路径亦会迅速失效,从而浪费大量规划导航路径的时间和人力成本。随着近年卫星定位的技术提升以及计算机图形运算技术的发展,利用卫星定位以及对未规划路径区域的导航功能成为了人们对于新开发区域的交通导航的一种解决方案。若能够对未规划路径的区域进行实时的导航实现临时路径的演示与即时提供临时导航方案,则可以大大提升人们在未知领域的交通移动能力。
3.查阅相关已公开的技术方案,公开号为cn102944247b的技术方案通过卫星图像演算通行区间内部的多个区域的天气预测状况,从而规划行动路径避开天气恶劣的路段,提高主体在移动过程的安全性和通行效率;公开号为us9594380b2的技术方案公开了一种适用于割草机等自动化设备进行无路径自主移动的路径规划方法和记录方法,通过由设置于设备上的360度全景拍摄装置识别运行区间以及未涉足区间,从而指导设备的运行路径完整地覆盖目标区域;公开号为jp2017003440a的技术方案通过分析用户的喜好分析用户的期望行动路线,从而优化路径的设计以提高用户的满意程度。以上技术方案皆部分或全部依赖于现有已探明的路径,亦面对完全无记录路径的应用场景则缺少了导航能力。
技术实现要素:
4.本发明的目的在于,提供本发明涉及一种应用卫星定位的无路径导航算法与系统;该导航算法适用于无现有路径的未知野外环境中进行移动导航;其中包括先由本导航系统获取移动主体的行动能力,以保证获取的导航路径适用于所述移动主体的行动;其次通过卫星信息处理模块基于卫星遥感图像对地面特征的分析,配合设置于移动主体的地面信息获取模块对近距离地面的实时分析,确定多个适合于移动主体的行动区间,从行动区间中进一步通过随机采样一致性算法迭代获得多个优化的线段模型,从而形成多段可连续连接的短途路径,同时计算适合的移动速度,指导移动主体向目标点移动。
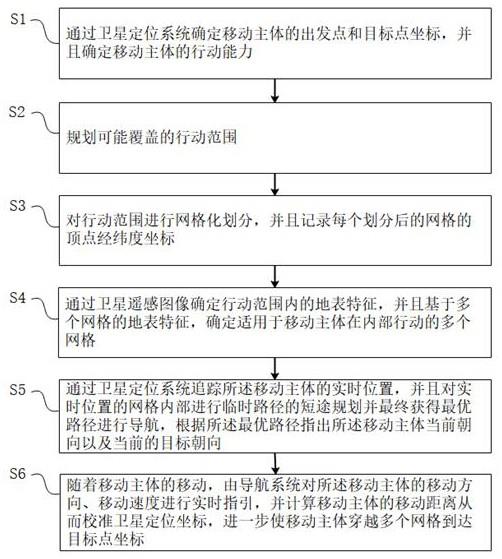
5.本发明采用如下技术方案:一种应用卫星定位的无路径导航算法,所述导航算法包括以下步骤:s1:通过卫星定位系统确定移动主体的出发点和目标点坐标,并且确定移动主体的行动能力;s2:规划可能覆盖的行动范围;s3:对行动范围进行网格化划分,并且记录每个划分后的网格的顶点经纬度坐标;
s4:通过卫星遥感图像确定行动范围内的地表特征,并且基于多个网格的地表特征,确定适用于移动主体在所述行动范围内的多个网格;s5:通过卫星定位系统追踪所述移动主体的实时位置,并且对实时位置的网格内部进行临时路径的短途规划并最终获得最优路径进行导航,根据所述最优路径指出所述移动主体当前朝向以及当前的目标朝向;s6:随着移动主体的移动,由导航系统对所述移动主体的移动方向、移动速度进行实时指引,并计算移动主体的移动距离从而校准卫星定位坐标,进一步使移动主体穿越多个网格到达目标坐标;其中,步骤s5包括以下子步骤,用于规划网格内的临时路径:s501:基于移动主体的行动能力,从网格内选择适合移动主体的多个行动区间;s502:从任意两个所述行动区间内,使用随机采样一致性的算法,进行随机采样,各选择一个坐标点子集建立线段模型;s503:计算一个线段模型中落入任意一个所述行动区间中的像素点的数量,从而检验该线段模型的正确性;s504:通过多次重复步骤s502以及步骤s503的采样计算进行线段模型的迭代,获取任意两个行动区间中最优的一个线段模型作为临时路径,从而获得多个连接任意两个行动区间的临时路径;s505:基于优先条件,从多个连接任意两个行动区间的临时路径中最终选取一个作为最优路径;可选地,移动主体的所述行动能力信息包括以下一项或一项以上的信息:移动主体的左右两侧轮距、额定移动速度、额定载荷、当前载荷、越野移动等级、涉水移动等级、最高续航里程、当前剩余续航里程;可选地,网格的所述地表特征包括区域内的刚度特征和摩擦特征,并通过以下一项或一项以上的地理特征进行估算:浸水程度、灌木植被占比、沙质土占比、高程方差;进一步的,在步骤s5中,对临时路径的短途规划,包括确定该临时路径从当前网格与即将进入的下一个网格的交界位置;可选地,所述优先条件包括基于路程最短条件、时间最短条件、风险最低条件,计算符合以上三项条件中的一项的临时路径作为最优路径;可选地,包括一种应用所述导航算法的导航系统;所述导航系统包括:存储模块,用于存储移动主体的行动能力数据、卫星定位数据以及临时路径规划数据,进一步包括存储所述导航算法所需要涉及的控制方法和数据处理的步骤;移动能力获取模块,被配置为用于获取所述移动主体的预设行动能力以及实时行动能力数据;卫星信息处理模块,被配置为获取行动范围的卫星遥感图像,并通过分析卫星遥感图像从而确定行动范围的地表特征;地面信息获取模块,被配置采集移动主体的周边环境从而确定由卫星遥感图像所分析的地表特征的准确度量,并反馈准确度量到所述卫星信息处理模块,从而校正行动范围的地表特征;路径运算模块,被配置为基于所述卫星信息处理模块和地面信息获取模块的分析
数据,以及基于移动主体的行动能力,获取一个目标区域的临时路径;可选地,所述地面信息获取模块包括采用一个设置于移动主体上方的激光雷达对移动主体的正前方以及两侧方面的地面信息进行扫描,并生成地面环境点云信息;所述路径运算模块包括根据地面环境点云信息,分析移动主体当前周围地面环境的地表特征。
6.本发明所取得的有益效果是:1. 本发明的导航算法可通过基于移动主体的移动能力,例如采用越野车或者采用家用车进行野外区域穿越时,规划适当的移动路径,避免了由于移动主体穿越能力不足发生意外,同时也为行动能力强的移动主体提供更高效的路径方案;2. 本发明的导航算法结束卫星遥感图像与地面成像设备的分析,基于卫星遥感图像实现宏观层面的大范围考量,再结合地面数据对地表特征作具体判断,能实时优化卫星信息处理模块的地表特征算法,并且实时对短途路径进行快速迭代更新;3. 本发明的导航系统适用于人工控制的各种移动器械,同时亦适用于自动化控制的移动装置,例如无人驾驶车辆或者移动式机器人;4. 本发明的导航算法以及预警系统,其硬件模块以及装置采用模块化设计和配合,后期可通过软件、硬件进行灵活优化和变更,节省了大量后期维护升级成本。
附图说明
7.从以下结合附图的描述可以进一步理解本发明。图中的部件不一定按比例绘制,而是将重点放在示出实施例的原理上。在不同的视图中,相同的附图标记指定对应的部分。
8.图1为本发明所述导航算法的步骤示意图;图2为本发明实施例中通过确定出发点和目标点规划行动范围以及划分网格的示意图;图3为本发明实施例中进行线段模型规划的示意图;图4为本发明实施例中进行临时路径规划的示意图;图5为本发明实施例中采用激光雷达扫描装置对周边环境进行扫描的示意图。
9.附图中标号说明:10-出发点;20-目标点;30-临时导航开始点;30a-第一线段模型;30b-第二线段模型;30c-第三线段模型;31-临时导航目标点;301-软泥土地块;302-岩面地块;310-第一网格;311-第二网格;312-第三网格;321-第一行动区间;322-第二行动区间;323-第三行动区间;40a-第一临时路径;40c-第三临时路径。
具体实施方式
10.为了使得本发明的目的技术方案及优点更加清楚明白,以下结合其实施例,对本发明进行进一步详细说明;应当理解,此处所描述的具体实施例仅用于解释本发明 ,并不用于限定本发明。对于本领域技术人员而言,在查阅以下详细描述之后,本实施例的其它系统.方法和/或特征将变得显而易见。旨在所有此类附加的系统、方法、特征和优点都包括在本说明书内.包括在本发明的范围内,并且受所附权利要求书的保护。在以下详细描述描述了所公开的实施例的另外的特征,并且这些特征根据以下将详细描述将是显而易见的。
11.本发明实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图
所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或组件必须具有特定的方位或以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
12.实施例一:如附图1所示,一种应用卫星定位的无路径导航算法,所述导航算法包括以下步骤:s1:通过卫星定位系统确定移动主体的出发点和目标点坐标,并且确定移动主体的行动能力;s2:规划可能覆盖的行动范围;s3:对行动范围进行网格化划分,并且记录每个划分后的网格的顶点经纬度坐标;s4:通过卫星遥感图像确定行动范围内的地表特征,并且基于多个网格的地表特征,确定适用于移动主体在所述行动范围内的多个网格;s5:通过卫星定位系统追踪所述移动主体的实时位置,并且对实时位置的网格内部进行临时路径的短途规划并最终获得最优路径进行导航,根据所述最优路径指出所述移动主体当前朝向以及当前的目标朝向;s6:随着移动主体的移动,由导航系统对所述移动主体的移动方向、移动速度进行实时指引,并计算移动主体的移动距离从而校准卫星定位坐标,进一步使移动主体穿越多个网格到达目标坐标;其中,步骤s5包括以下子步骤,用于规划网格内的临时路径:s501:基于移动主体的行动能力,从网格内选择适合移动主体的多个行动区间;s502:从任意两个所述行动区间内,使用随机采样一致性的算法,进行随机采样,各选择一个坐标点子集建立线段模型;s503:计算一个线段模型中落入任意一个所述行动区间中的像素点的数量,从而检验该线段模型的正确性;s504:通过多次重复步骤s502以及步骤s503的采样计算进行线段模型的迭代,获取任意两个行动区间中最优的一个线段模型作为临时路径,从而获得多个连接任意两个行动区间的临时路径;s505:基于优先条件,从多个连接任意两个行动区间的临时路径中最终选取一个作为最优路径;可选地,移动主体的所述行动能力信息包括以下一项或一项以上的信息:移动主体的左右两侧轮距、额定移动速度、额定载荷、当前载荷、越野移动等级、涉水移动等级、最高续航里程、当前剩余续航里程;可选地,网格的所述地表特征包括区域内的刚度特征和摩擦特征,并通过以下一项或一项以上的地理特征进行估算:浸水程度、灌木植被占比、沙质土占比、高程方差;进一步的,在步骤s5中,对临时路径的短途规划,包括确定该临时路径从当前网格与即将进入的下一个网格的交界位置;可选地,所述优先条件包括基于路程最短条件、时间最短条件、风险最低条件,计算符合以上三项条件中的一项的临时路径作为最优路径;
可选地,包括一种应用所述导航算法的导航系统;所述导航系统包括:存储模块,用于存储移动主体的行动能力数据、卫星定位数据以及临时路径规划数据,进一步包括存储所述导航算法所需要涉及的控制方法和数据处理的步骤;移动能力获取模块,被配置为用于获取所述移动主体的预设行动能力以及实时行动能力数据;卫星信息处理模块,被配置为获取行动范围的卫星遥感图像,并通过分析卫星遥感图像从而确定行动范围的地表特征;地面信息获取模块,被配置采集移动主体的周边环境从而确定由卫星遥感图像所分析的地表特征的准确度量,并反馈准确度量到所述卫星信息处理模块,从而校正行动范围的地表特征;路径运算模块,被配置为基于所述卫星信息处理模块和地面信息获取模块的分析数据,以及基于移动主体的行动能力,获取一个目标区域的临时路径;可选地,所述地面信息获取模块包括采用一个设置于移动主体上方的激光雷达对移动主体的正前方以及两侧方面的地面信息进行扫描,并生成地面环境点云信息;所述路径运算模块包括根据地面环境点云信息,分析移动主体当前周围地面环境的地表特征;其中,在一种实施方式中,包括采用基于gps全球定位系统、北斗卫星定位系统、伽利略卫星定位系统、格洛纳斯卫星定位系统等基于卫星定位系统获取移动主体在地球上的绝对坐标定位;优选地,所述移动主体上安装有卫星信号接收机,其主要功能是能够捕获到按一定卫星截止角所选择的待测卫星,并跟踪这些卫星的运行;当接收机捕获到跟踪的卫星信号后,即可测量出接收天线至卫星的伪距离和距离的变化率,解调出卫星轨道参数等数据;根据这些数据,接收机中的微处理计算机就可按定位解算方法进行定位计算,计算出用户所在地理位置的经纬度、高度、速度、时间等信息;接收机硬件和机内软件以及定位系统数据的后处理软件包构成完整的用户卫星定位设备。卫星信号接收机的结构分为天线单元和接收单元两部分;接收机一般采用机内和机外两种直流电源;设置机内电源的目的在于更换外电源时不中断连续观测;在用机外电源时机内电池自动充电;关机后,机内电池为随机存储器供电,以防止数据丢失;进一步的,所述接收机的定位数据包括存储于所述存储模块中,并且可由其他导航系统的模块进行调用和读取;如附图2所示,所述卫星信息处理模块通过卫星定位系统进行移动主体的定位,获取移动主体当前的坐标,具体可以为经纬度坐标,或者可以为其他定位标定系统的坐标;将当前移动主体的定位作为出发点10;另一方面,由移动主体的控制用户,通过将目标点20输入所述导航系统;从而,根据出发点坐标和目标点坐标,可以划定一可能覆盖的行动范围;在一种实施方式中,将出发点和目标点以线段连接,并以该连接线段作为一矩形的对角线,并且将该矩形按比例进行扩充,从而获得一矩形的行动范围;在一种实施方式中,将该连接线段的中点作为矩形的几何中心,并画出一正四边形作为行动范围;进一步的,所述卫星信息处理模块获取该行动范围的卫星遥感图像,并且对行动范围以网格化划分为多个网格,如附图2所示;进一步的,所述移动能力获取模块需要获取该移动主体的移动能力参数,所述导
航算法需要考虑移动主体的移动能力,从而作出适合的导航指引规划;例如在一些情况,移动主体为普通型车辆,其轮胎尺寸为17英寸或18英寸规格,排气管位于车辆后方,最高涉水深度不超过38cm;并且轮胎为一般防滑轮胎,可以适应于一般的涉水区域以及沙土地;其最高时速为150公里/小时,额定载荷为2000kg;另外在一些情况,移动主体可以为越野型卡车,具有8个大尺寸轮胎并且可以达到1米以上的涉水深度,额定载荷为5吨,并且当前已经满载;另外在一些情况,移动主体可以为四足或六足的移动机器人,其具有可涉足80cm以上水深并且具备穿越沼泽区域,然而其移动速度为5公里/小时;基于各类型的移动主体,其移动能力各有优势和劣势部分,所述移动能力获取模块包括对移动主体的移动能力进行量化,并获取移动能力的数值e=[e1,e2
……
en],其中e1,e2
……
en为多个体现移动能力的项目,例如速度、载何、涉水深度等,根据实际情况进行选择和划分;并且优先地,通过对各项移动能力的项目进行数据归一化处理,获得具有相同量纲和数值范围的多个数值;另一方面,所述卫星信息处理模块根据行动范围的卫星遥感图像作进一步的地表特征分析;地表特征的分类就是利用计算机通过对遥感图像中各类地物的光谱信息和空间信息进行分析、选择特征,将图像中各个像元按照某种规则或算法划分不同的类别,然后获得遥感图像中与实际地物的对应信息,从而实现图像的分类;遥感图像计算机分类的依据是遥感图像像素的相似度;常使用距离和相关系数来衡量相似度;优选地,分类方法包括:监督分类、非监督分类法;其中,监督分类方法首先根据类别的经验知识,确定判别模型和相应的判别准则;利用一定数量的已知类别的样本(即训练样本)的观测值确定判别函数中待定参数,建立地表特征判别模型,然后将未知类别的样本的观测值代入判别模型,再依据判别准则对该样本的所属类别作出判定;而非监督分类的理论依据是,遥感图像上的同类地物在相同表面结构特征、植被覆盖、光照等条件下,应当具有相同或近似的光谱特征,从而表现出某种内在相似性,归属于同一个光谱空间区域;不同的地物,光谱信息特征不同,归属不同的光谱空间区域;通过对行动范围的地表特征分析,获取行动范围内每个网格中具有的地表特征,从而进行下一步导航路径的规划;进一步如附图3所示,移动主体当前所在临时导航开始点30需要到临时导航目标点31;其中,所在的行动范围包括4个网格,从卫星遥感图像中分析,行动范围中包括软泥土地块301,以及岩面地块302,其余地表均为草地或干旱硬地;基于移动主体的行动能力判断,在一种实施情况中,移动主体不适合进行软泥土地块301的穿越,因此,将软泥土地块301排除在采样的范围外,并在第一网格310中排除软泥土地块301的部分,余下区间作为行动区间,其中则包括第一行动区间321,第二行动区间322以及第三行动区间323;进一步的,使用随机采样一致性方法,在三个行动区间中,各选择一个坐标子集,并选择每个坐标子集中包括的至少一个点与所在临时导航开始点30进行连线,获得至少三个线段模型30a、30b、30c;并通过计算该线段模型包括在行动区间内的像素点的数量,计算该线段模型的正确性;
例如从附图3可知,其中第二线段模型30b由于穿过了软泥土地块301,因此第二线段模型30b包括在行动区间内的像素点的数量将较少,而第一线段模型30a和第三线段模型30c则大部分包含在行动区间内部;以附图3为例,仅列出一个示意性的计算原理例子;在真实的实施方式中,行动区间的划分方式将基于移动主体的移动能力以及卫星遥感图像的地表特征分析精度作更精细的实施操作;进一步的,需要考虑移体主体的横向宽度的通过性,因此将一个临时路径作为中心线规划为于该临时路径的左右两侧的各一个线段模型,并以该两段线段模型作为临时路径的左右边界,允许移体主体可以从左右边界中的空间中移动;如附图4所示,由第一线段模型30a规划得第一临时路径40a,由第三线段模型30c规划得第三临时路径40c;其中第一临时路径40a更趋向于进入第三网格312,而第三临时路径40c则更趋向于进入第二网格311;进一步的,基于所述优先条件,例如路径最短条件,在第一临时路径40a和第三临时路径40c中最终选择一条作为最优路径开始移动;进一步的,将一段最优路径的终点作为下一个出发点,考虑后续临时路径的连接以及规划。
[0013]
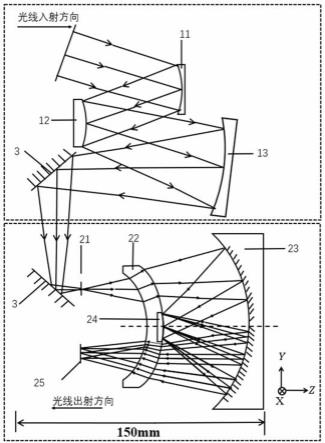
实施例二:本实施例应当理解为至少包含前述任意一个实施例的全部特征,并在其基础上进一步改进;进一步的,卫星遥感图像存在一定缺陷,例如分辨率不足、通过光谱特性的地表特征分类准确程度一般等;因此,本实施例中,包括通过设置于移动主体上的地面信息获取模块,对地表特征数据作进一步采集和分析;在一种实施方式中,地面信息获取模块包括配置有激光雷达的扫描装置,对移动主体周围的环境作进一步判断和分析,包括将地面信息获取模块和卫星信息获取模块的数据进行结合分析;如附图5所示,为采用激光雷达扫描装置,对移动主体正前方向的地表特征进行扫描后,获得点云图像数据;这些点云数据通过激光雷达向地面发射激光信号,并收集和记录地面反射的激光信号;此后,所述地面信息获取模块通过联合解算、偏差校正,便可以计算出这些点云的准确空间信息;其中,每一个点云都具备空间坐标信息,因此每个点云都具备空间描述能力;并以两点成线,三点成面,四点成体,通过点云信息可以明确了解地表空间上物体或地表形状的坐标信息,还可以计算它们之间的长度、面积、体积、角度等信息;在一些实施方式中,包括通过获得的地面点云图像,进一步解析卫星遥感图像中判断为灌木丛的区域是否包括有乔木丛,从而更正将灌木丛标记为行动区间的漏洞;在一些实施方式中,包括通过地面点云图像,了解地表上是否存在大量凹凸岩石地面,或者存在大量坑洼地带,使得移动主体以当前的移动能力无法通过,并反馈到所述导航系统中,重新规划临时路径;在一些实施方式中,包括通过地面点云图像,判断路面的平整情况或者是否具有明显障碍物,从而指导移动主体是否可以提高移动速度或者进行缓慢前进;在一些实施方式中,包括判断移动主体正前方环境的高程方差,确认继续前进是
否会遇见陡坡或者有急坠危险;在一些实施方式中,包括由地面信息获取模块通过对当前区域的地表特征分析,向所述卫星信息处理模块提供更多参考数据,用于调整优化其分析地表特征的计算参数或者计算模型,从而实现更为准确的卫星遥感图像分析结果。
[0014]
实施例三:本实施例应当理解为至少包含前述任意一个实施例的全部特征,并在其基础上进一步改进;为进一步向分析获得更为准确的地表特征,所述地面信息获取模块包括采用rgb图像传感器获取当前地面信息,并通过深度学习方式,建立地表特征分析模型,使该地表特征分析模型可以结合卫星遥图图像数据,从而实现更为准确的地表特征分类;其中,初步对地表特征的分类可以划分为七大类,包括:草地、土石地、岩石地、冰面、浅水、柏油路、大型障碍,并包括七大类中的混合类型;进一步的,包括对以上七大类地型进行进一步细分,例如青草地、枯草地、疏松沙地、陆上水洼、脏冰面、光滑岩石等类型;进一步的,建立对地型分类的神经网络,并进行神经网络的训练,用于加强对地型进行分类的语义分割功能;其中,该神经网络包括对获取的图像进行采样处理,即对具有大量特征数据的图像进行缩小,例如进行池化、卷积等操作;其中,对输入的原始分辨率图像同时进行n=63、f=3、p=1、s=2的卷积,f=2、p=0、s=2的最大池化和f=2、p=0、s=2的平均池化;其中,卷积操作中的参数在通过多次模型学习过程中进行迭代从而实现学习优化,用于提取图像的某些低级别特征;平均池化可以提取图像中属于池化核窗口部分的平均特征;最大池化可以提取图像中属于池化核窗口部分的最大像素值,也就是直接选取该窗口内最具代表性的像素;通过这三种操作,可以分别从不同的实现深度对原始分辨率图像的信息特征进行提取;进一步的,包括对图像中的地表特征进行几何纹理识别,用于分辨地表的纹理特征;进一步的,包括对图像中的上下文信息进行感知研究,即通过识别图像中某类型的周围环境,包括该类型与其他类型在同一张图像上的共存性、空间位置关系等,从而使神经网络能够考虑待分类的地表所处的环境,提高场景特征的解析能力;其中,上下文信息包括日光照射条件、时间条件、天气条件等;该部分上下文信息,包括可以从卫星信息获取模块以及更多的信息渠道进行获取;进一步的,可以对地表表面的机械特征实施进一步识别,包括使用sobel算子对图像上的地表部分进行卷积运算,从而获得地表图像中像素的变化程度,进一步推算地表的粗糙程度;进一步的,包括对地表表面的光学特征进行识别,包括地表图像呈现的颜色、光泽度、透明度等信息,从而辅助判断地表类型;通过建立地表特征分析模型,使所述导航系统可以获得更为精确的行动区间信息,从而进一步实现更高效和安全的导航路径规划。
[0015]
在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述或记载的部分,可以参见其它实施例的相关描述。
[0016]
虽然上面已经参考各种实施例描述了本发明,但是应当理解,在不脱离本发明的范围的情况下,可以进行许多改变和修改。也就是说上面讨论的方法,系统和设备是示例。各种配置可以适当地省略,替换或添加各种过程或组件。例如,在替代配置中,可以以与所描述的顺序不同的顺序执行方法,和/或可以添加,省略和/或组合各种部件。而且,关于某些配置描述的特征可以以各种其他配置组合,如可以以类似的方式组合配置的不同方面和元素。此外,随着技术发展其中的元素可以更新,即许多元素是示例,并不限制本公开或权利要求的范围。
[0017]
在说明书中给出了具体细节以提供对包括实现的示例性配置的透彻理解。然而,可以在没有这些具体细节的情况下实践配置例如,已经示出了众所周知的电路,过程,算法,结构和技术而没有不必要的细节,以避免模糊配置。该描述仅提供示例配置,并且不限制权利要求的范围,适用性或配置。相反,前面对配置的描述将为本领域技术人员提供用于实现所描述的技术的使能描述。在不脱离本公开的精神或范围的情况下,可以对元件的功能和布置进行各种改变。
[0018]
综上,其旨在上述详细描述被认为是例示性的而非限制性的,并且应当理解,以上这些实施例应理解为仅用于说明本发明而不用于限制本发明的保护范围。在阅读了本发明的记载的内容之后,技术人员可以对本发明作各种改动或修改,这些等效变化和修饰同样落入本发明权利要求所限定的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。