一种新型空间分布imu的防冲钻孔机器人位姿调节方法
技术领域
1.本发明涉及一种防冲钻孔机器人位姿调节方法,具体为一种基于新型空间分布惯性单元(imu)的防冲钻孔机器人位姿自动调节方法,属于煤矿开采技术领域。
背景技术:
2.煤炭是人类主要使用的能源之一,我国的煤炭储存量大,但在开采过程中因为冲击地压会产生许多危害,而且随着我国煤矿开采深度和强度的加大,冲击地压发生频次和破坏强度也不断增大,因此需要防冲钻孔机器人进行防冲卸压孔的施工以确保开采的安全性。传统的防冲钻孔机器人通常在固定位置进行姿态调节,同时还要人工观察机架的运行情况,从而导致钻孔效率低。为了提高钻孔的效率,实现卸压过程的自动化,防冲钻孔机器人精确的位移与姿态是实现位姿自动调节的基础。
3.运用惯性单元(imu)来解算物体的位移与姿态是目前常用的一种方法,惯性单元是一种通过测量物体三轴姿态角(或角速率)以及加速度的装置,其数据更新率高、短期精度和稳定性好,但是由于所得信息经过积分而产生,定位误差随时间而增大,长期精度差,单个惯性单元效果不佳。
技术实现要素:
4.本发明的目的就在于为了解决上述问题而提供一种新型空间分布imu的防冲钻孔机器人位姿调节方法。
5.本发明通过以下技术方案来实现上述目的:一种新型空间分布imu的防冲钻孔机器人位姿调节方法,包括防冲钻孔机器人,其用于对煤矿的防冲卸压孔进行钻孔施工,且其采用型号为zywl-4000y的钻孔机器人;惯性单元组,其固定安装在所述防冲钻孔机器人上用于预测所述防冲钻孔机器人的位移与姿态并进行实时误差补偿,且其包括正八面体结构架、固定安置在所述正八面体结构架上的惯性单元,且所述惯性单元选用无锡北微传感科技有限公司的bw-imu400型高性能的惯性测量传感器,包含mems加速度计和陀螺仪;其中,所述惯性单元22测量运动载体的姿态参数(横滚角、俯仰角、角速度、加速度)。姿态和角速度偏差通过具有适当增益的6态卡尔曼滤波得到最优估计,适用于运动或震动状态下的倾角测量。通过非线性补偿、正交补偿、温度补偿和漂移补偿等多种补偿,可以大大消除误差源,提高测量精度水平。同时bw-imu400具备数字接口,可以非常方便的集成到用户的系统中,方便实验数据的采集,以能够实时采集防冲钻孔机器人的位移与姿态信息,将数据反馈给上位机,上位机再进行后续操作。
6.其调节方法包括以下步骤:步骤一、多次采集某一时刻惯性单元组的惯性单元的数据,以获得多组数据,输入大量实验数据后得到一个训练好的循环神经网络模型,并设置一个误差阈值,多次重复实
验是为了采集大量实验数据,为训练循环神经网络模型做准备;步骤二、得到训练好的模型之后,在t时刻,将所采集的六路数据进行融合处理,导入到训练好的模型中,得到一个误差值,t时刻采集的是一组新的数据,是为了验证步骤一所训练得到的循环神经网络模型的准确性;步骤三、将所获得的误差值与所设置的误差阈值进行比较,若误差值不大于所设误差阈值,则继续采集下一时刻t 1的数据,并与t时刻的产生的误差进行误差累计,再与所设误差阈值比较,若仍然不大于误差阈值,则继续采集下一时刻t 2的数据进行误差累计,如此循环,直到所产生的累积误差大于所设误差阈值,则结束该循环,进行调整后,再进行下一轮的位姿自动调节,由于防冲钻孔机器人在工作过程中误差随时都在产生,误差阈值的设置就是当误差累积过大时,就要对机器人进行自动调节从而抵消所产生的误差。
7.作为本发明再进一步的方案:所述惯性单元分别位于正八面体结构架的六个顶点处,可以同时采集六组数据。
8.作为本发明再进一步的方案:六个所述惯性单元到正八面体结构架中心位置的距离相同,为1:1:1:1:1:1设置,使每个惯性单元测量数据占比相同,因此按照1:1:1:1:1:1的比例融合处理六路数据,使测量更加准确。
9.作为本发明再进一步的方案:所述惯性单元组位于防冲钻孔机器人的重心位置处。
10.作为本发明再进一步的方案:所述步骤一中,将数据导入循环神经网络进行训练,以得到预测模型,这样做可以使所训练出来的模型更加可靠,预测防冲钻孔机器人的位移与姿态更加准确并进行实时误差补偿,从而实现防冲钻孔机器人位移与姿态的自动调节,提高钻孔效率,实现卸压过程的自动化。
11.本发明的有益效果是:将采集的六组数据进行融合处理,并导入循环神经网络进行训练,得到预测模型,这样做可以使所训练出来的模型更加可靠,预测防冲钻孔机器人的位移与姿态更加准确并进行实时误差补偿,从而实现防冲钻孔机器人位移与姿态的自动调节,提高钻孔效率,实现卸压过程的自动化。
附图说明
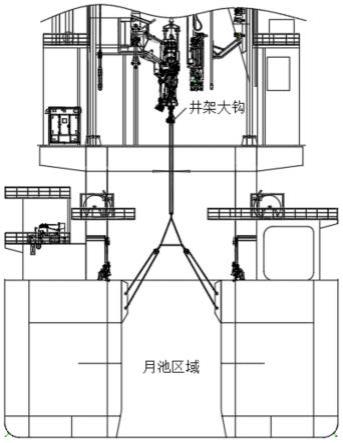
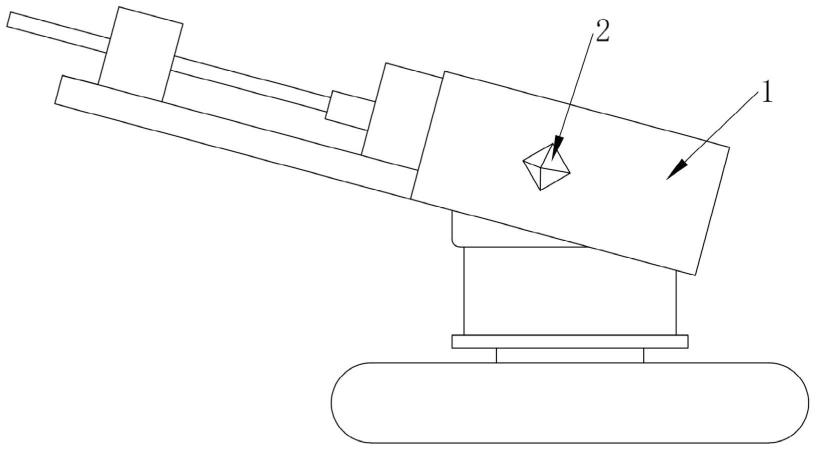
12.图1为本发明防冲钻孔机器人结构示意图;图2为本发明惯性单元分布结构示意图;图3为本发明防冲钻孔机器人位姿自动调节流程示意图。
13.图中:1、防冲钻孔机器人,2、惯性单元组,21、正八面体结构架,22、惯性单元。
具体实施方式
14.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
15.实施例一请参阅图1~3,一种新型空间分布imu的防冲钻孔机器人位姿调节方法,包括
防冲钻孔机器人1,其用于对煤矿的防冲卸压孔进行钻孔施工,且其采用型号为zywl-4000y的钻孔机器人;惯性单元组2,其固定安装在所述防冲钻孔机器人1上用于预测所述防冲钻孔机器人1的位移与姿态并进行实时误差补偿,且其包括正八面体结构架21、固定安置在所述正八面体结构架21上的惯性单元22,且所述惯性单元22选用无锡北微传感科技有限公司的bw-imu400型高性能的惯性测量传感器,包含mems加速度计和陀螺仪。
16.在本发明实施例中,所述惯性单元22分别位于正八面体结构架21的六个顶点处,可以同时采集六组数据。
17.在本发明实施例中,六个所述惯性单元22到正八面体结构架21中心位置的距离相同,为1:1:1:1:1:1设置,使每个惯性单元22测量数据占比相同,因此按照1:1:1:1:1:1的比例融合处理六路数据,使测量更加准确。
18.在本发明实施例中,所述惯性单元组2位于防冲钻孔机器人1的重心位置处。
19.实施例二请参阅图3,一种新型空间分布imu的防冲钻孔机器人位姿调节方法,其调节方法包括以下步骤:步骤一、多次采集某一时刻惯性单元组2的惯性单元22的数据,以获得多组数据,输入大量实验数据后得到一个训练好的循环神经网络模型,并设置一个误差阈值,多次重复实验是为了采集大量实验数据,为训练循环神经网络模型做准备,因为理论上足够多的样本可以训练出来很好的循环神经网络模型;步骤二、得到训练好的模型之后,在t时刻,将所采集的六路数据进行融合处理,导入到训练好的模型中,得到一个误差值,t时刻采集的是一组新的数据,是为了验证步骤一所训练得到的循环神经网络模型的准确性,不可能完全没有误差,因此是有误差值存在的;步骤三、将所获得的误差值与所设置的误差阈值进行比较,若误差值不大于所设误差阈值,则继续采集下一时刻t 1的数据,并与t时刻的产生的误差进行误差累计,再与所设误差阈值比较,若仍然不大于误差阈值,则继续采集下一时刻t 2的数据进行误差累计,如此循环,直到所产生的累积误差大于所设误差阈值,则结束该循环,进行调整后,再进行下一轮的位姿自动调节,由于防冲钻孔机器人在工作过程中误差随时都在产生,误差阈值的设置就是当误差累积过大时,就要对机器人进行自动调节从而抵消所产生的误差。目的就是使防冲钻孔机器人在工作过程中位移与姿态产生偏差可以进行自动调节,消除所产生的误差。
20.在本发明实施例中,所述步骤一中,将数据导入循环神经网络进行训练,以得到预测模型,这样做可以使所训练出来的模型更加可靠,预测防冲钻孔机器人的位移与姿态更加准确并进行实时误差补偿,从而实现防冲钻孔机器人位移与姿态的自动调节,提高钻孔效率,实现卸压过程的自动化。
21.实施例三选用的惯性单元(imu)为bw-imu400型,可以测量运动载体的姿态参数(横滚角、俯仰角、角速度、加速度),设置六个惯性单元的设备号为0x01、0x02、0x03、0x04、0x05和 0x06,将构成惯性单元组的六个惯性传感单元的信号线全部接到转换器,转换器同过usb接口与上位机连接,进而实现数据的传输。
22.通过上位机采集惯性单元的数据,并将采集出来的数据进行融合处理,将融合后的数据导入解算算法进行位姿解算,输出防冲钻孔机器人的位移与姿态参数,将实验数据保存。重复此过程,获得大量实验数据。
23.将所获得的实验数据导入循环神经网络进行训练,使用训练有素的神经网络对上述解算算法输出防冲钻孔机器人的位移与姿态误差进行预测,根据神经网络预测的误差,进一步对防冲钻孔机器人位移与姿态的解算误差进行补偿,得到更加精确的防冲钻孔机器人位移与姿态参数,从而进行自动位姿调节。
24.设计多个惯性单元采集数据并进行融合处理,采集大量实验数据,同时将数据导入循环神经网络进行训练,得到预测模型。将新的数据代入得到的预测模型,对防冲钻孔机器人的位移与姿态进行实时误差补偿,从而实现防冲钻孔机器人位移与姿态的自动调节。
25.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
26.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。