1.本发明涉及农业机具,具体为一种小型整杆甘蔗联合收割机。
背景技术:
2.目前,规模化的甘蔗收割主要采用机械程度高的大型切段式甘蔗联合收割机,其结构庞大,整机重量大、价格昂贵,作业损失率高,杂质多,浪费比较大,甘蔗时效性短,蔗农无法承受损失,作业时常碾压烂甘蔗根部,影响第二年甘蔗出芽率,在小田块无法作业。
技术实现要素:
3.针对现有技术的不足,本发明所要解决的技术问题是提出了一种适应大、小蔗田作业且损失小的小型整杆甘蔗联合收割机。
4.能够解决上述技术问题的小型整杆甘蔗联合收割机,其技术方案包括基于四轮底盘行走单元设置的甘蔗收割传输单元、有叶蔗杆横向喂入单元、有叶蔗杆剥叶单元和无叶蔗杆收集单元,所不同的是:
5.1、所述甘蔗收割传输单元设于四轮底盘行走单元的前部一侧,包括左、右斜置的搅龙,左、右搅龙后部的底部中间设有圆盘割刀,所述圆盘割刀的后侧设有斜置的提升输送链,所述提升输送链的后侧设有前、后向的导向槽,所述导向槽上方的左、右搅龙之间设有左、右的传输夹持链。
6.2、所述有叶蔗杆横向喂入单元设于导向槽的后侧,包括左、右设置且自内而外转动的输送齿盘,对应于左、右输送齿盘于四轮底盘行走单元的后部设有有叶蔗杆托架,所述有叶蔗杆托架与左、右传输夹持链之间设有有叶蔗杆扶架,左、右输送齿盘之间的上方设有由左、右护蔗导杆形成的锥形落料口。
7.3、所述有叶蔗杆剥叶单元包括左、右的有叶蔗杆剥叶装置,各有叶蔗杆剥叶装置设于对应输送齿盘的外侧,包括由传动机构带动而前、后往复运动的剥叶器,所述传动机构包括安装于剥叶传动链上的横向悬臂,所述剥叶器通过活动关节安装于横向悬臂上,所述剥叶器包括夹持有叶蔗杆的垂直夹持链、水平夹持链和活动夹持链,夹持链组的前、后分别设有内、外对称布置且上、下往复运动的至少一把“u”型剥叶刀;所述活动夹持链设于由拉伸弹簧ⅳ回位的开合机构上,所述开合机构上设有被开关压板按压的开关杆。
8.4、所述无叶蔗杆收集单元包括左、右的无叶蔗杆收集斗,各无叶蔗杆收集斗设于对应剥叶器运行路径的下方。
9.进一步,所述传动机构的一种结构包括安装于内、外的剥叶传动链上的横向悬臂,所述横向悬臂的臂体上设有滚动配合在上、下导轨之间的滚轮,所述剥叶器通过活动关节安装于横向悬臂上。
10.进一步,各输送齿盘外侧的前部设有将有叶蔗杆快速向外拨送的弹射器。
11.进一步,各无叶蔗杆收集斗的外侧铰装并由拉伸弹簧ⅰ回位在水平位置。
12.常规的,所述四轮底盘行走单元前部的另一侧设有驾驶驱动控制单元。
13.本发明的有益效果:
14.1、本发明小型整杆甘蔗联合收割机适用性广,不仅适用于小田,也完全能够胜任于大田里的甘蔗收割,其结构合理,体积小,重量轻。
15.2、采用本发明技术,减少了损失率,减轻了作业人员的劳动强度,不影响甘蔗发芽率,提高了产量,增加了农民收入。
16.3、本发明结构中的核心部件为有叶蔗杆剥叶单元,采用多把“u”型剥叶刀顺着蔗杆来剥掉甘蔗叶子,可控制剥叶深度,有效保证不割伤蔗杆,无论甘蔗直径大小及歪斜都可以进行正常剥叶,使收获的甘蔗更干净。
附图说明
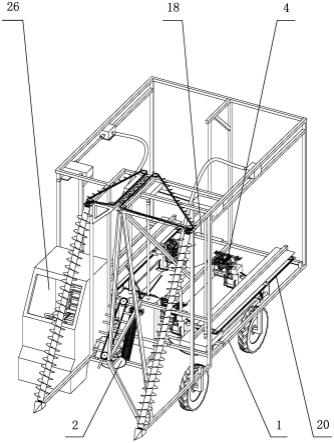
17.图1为本发明一种实施方式的第一视角轴测图。
18.图2为图1实施方式的第二视角轴测图。
19.图3为图1实施方式的第三视角轴测图。
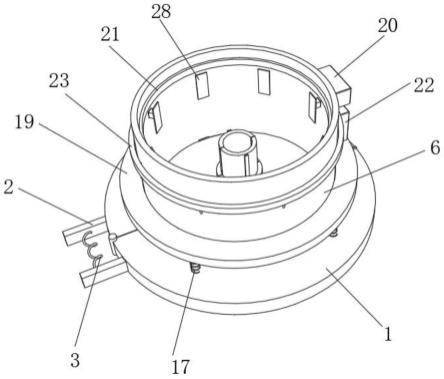
20.图4为图1实施方式中甘蔗收割传输单元的轴测图。
21.图5为图1实施方式中蔗杆横向喂入单元和蔗杆剥叶单元的组合结构示意图。
22.图6为图5中蔗杆横向喂入单元的结构示意图。
23.图7为图5中蔗杆剥叶单元的轴侧图。
24.图8为图7中蔗杆剥叶单元的主视图。
25.图9为图1实施方式中蔗杆收集单元的轴侧图。
26.图号标识:1、四轮底盘行走单元;2、甘蔗收割传输单元;3、有叶蔗杆横向喂入单元;4、有叶蔗杆剥叶单元;5、无叶蔗杆收集单元;6、搅龙;7、圆盘割刀;8、提升输送链;9、传输夹持链;10、导向槽;11、输送齿盘;11-1、拨蔗齿;12、有叶蔗杆;13、垂直夹持链;14、水平夹持链;15、活动夹持链;16、“u”型剥叶刀;17、无叶蔗杆收集斗;18、有叶蔗杆托架;19、有叶蔗杆扶架;20、剥叶传动链;21、横向悬臂;22、滚轮;23、活动关节;24、弹射器;25、拉伸弹簧ⅰ;26、驾驶驱动控制单元;27、传动箱ⅰ;28、辅助输送链;29、护蔗导杆;30、拉伸弹簧ⅱ;31、传动箱ⅱ;32、支架;33、开合机构;34、升降杆;35、升降架;36、曲柄连杆机构;37、无叶蔗杆;38、锥形落料口;39、拉伸弹簧ⅲ;40、开关压板;41、开关杆;42、拉伸弹簧ⅳ。
具体实施方式
27.下面结合附图所示实施方式对本发明的技术方案作进一步说明。
28.本发明小型整杆甘蔗联合收割机,包括四轮底盘行走单元1,所述四轮底盘行走单元1的前部右侧设有驾驶驱动控制单元26,四轮底盘行走单元1的前部左侧设有甘蔗收割传输单元2,所述甘蔗收割传输单元2后侧的四轮底盘行走单元1上设有有叶蔗杆横向喂入单元3,对应于有叶蔗杆横向喂入单元3于四轮底盘行走单元1上设有有叶蔗杆剥叶单元4,对应于有叶蔗杆剥叶单元4于四轮底盘行走单元1上设有无叶蔗杆收集单元5,如图1、图2、图3所示。
29.所述甘蔗收割传输单元2包括搅龙6、圆盘割刀7、提升输送链8和传输夹持链9,左、右对称的搅龙6斜向设置,其前端低而后端高,左、右位置的传输夹持链9(水平直角状)设于左、右搅龙6高端之间的后侧,各传输夹持链9包括横向段(左、右向)和纵向段(前、后向),所
述圆盘割刀7设于传输夹持链9的左、右横向段之间的下方且平齐于左、右搅龙6的低端,所述提升输送链8斜向设置且位置对应在传输夹持链9的左、右纵向段之间,提升输送链8的前下端处于圆盘割刀7后侧,提升输送链8的后上端处于传输夹持链9的左、右纵向段的后部,提升输送链8的右侧设有斜向设置的辅助输送链28,如图4所示。
30.所述有叶蔗杆横向喂入单元3基于传动箱ⅰ27设置,所述传动箱ⅰ27设于提升输送链8后侧,传动箱ⅰ27顶部的凹口作为导向槽10对位在提升输送链8的后上端,有叶蔗杆横向喂入单元3包括左、右对称安装于传动箱ⅰ27后端面上的左、右输送齿盘11,左、右输送齿盘11上方的传动箱ⅰ27后端面上设有左、右对称的护蔗导杆29,左、右护蔗导杆29形成处于左、右输送齿盘11之间上方的锥形落料口38,各输送齿盘11上圆周均布开设有拨蔗齿11-1,左、右输送齿盘11自内而外反向转动,左、右输送齿盘11上错位的拨蔗齿11-1交替于锥形落料口38下方自下而上转动,对应于各输送齿盘11转动方向的外侧设有安装于传动箱ⅰ27后端面上的弹射器24,如图4、图5、图6所示。
31.对应于左、右输送齿盘11于四轮底盘行走单元1的后部设有左、右向的有叶蔗杆托架18,所述传输夹持链9的左、右纵向段的后端与叶蔗杆托架18之间设有有叶蔗杆扶架19,所述有叶蔗杆扶架19的前端与左、右纵向段的后端连接,有叶蔗杆扶架19的后端与有叶蔗杆托架18相离,如图2、图3所示。
32.所述有叶蔗杆剥叶单元4包括左、右对称的剥叶器,各剥叶器对应于各输送齿盘11上弹射器24的弹射位置设置,对应于各剥叶器设有传动机构带动剥叶器前、后向往复运动,所述传动机构包括左、右向的横向悬臂21(自外向内悬伸),所述横向悬臂21的臂体上安装有设于上、下导轨之间的滚轮22,所述滚轮22外侧的横向悬臂21的臂体安装在内、外的剥叶传动链20上,所述剥叶器通过活动关节23安装于横向悬臂21的内端上,剥叶器与横向悬臂21之间设有将剥叶器回位的拉伸弹簧ⅱ30,如图5、图7、图8所示。
33.所述剥叶器包括通过支架32安装于传动箱ⅱ31上的夹持链组和剥叶刀组,所述传动箱ⅱ31通过活动关节23安装于横向悬臂21上,所述夹持链组包括下方位置固定的垂直夹持链13(主动链)、内侧的位置固定的水平夹持链14(主动链)和外侧安装于开合机构33上的活动夹持链15(从动链),所述活动夹持链15在开合机构33控制下转向、转离垂直夹持链13和水平夹持链14;两套剥叶刀组分别设于夹持链组的前、后方,各套剥叶刀组包括左、右对称布置的双排“u”型剥叶刀16,每侧各“u”型剥叶刀16的尾部铰装于同侧的升降杆34上并通过拉伸弹簧ⅲ39回位,左、右倾斜对位的“u”型剥叶刀16的前端相对并处于夹持链组中央夹持部位的上方或下方,左、右升降杆34设置在升降架35上,所述升降架35在曲柄连杆机构36带动下作上、下往复运动;所述开合机构33上设有用于被按压的开关杆41,所述开关杆41通过拉伸弹簧ⅳ42回位,与开关杆41对位于传动箱ⅰ27的背面上设有开关压板40,如图5、图7、图8所示。
34.所述有叶蔗杆剥叶单元4包括左、右对称的无叶蔗杆收集斗17,左、右无叶蔗杆收集斗17分别设于左、右剥叶器运动路径的下方,各无叶蔗杆收集斗17的外侧铰装并通过拉伸弹簧ⅰ25回位在水平位置,如图9所示。
35.所述甘蔗收割传输单元2的工作原理为:
36.收割机前进时,左、右绞龙6把倾斜、倒伏的甘蔗扶正,连同直立的甘蔗一起喂入,先是左、右传输夹持链9把甘蔗夹持住并往后面拨送,随即圆盘割刀7切断甘蔗根部,被切断
的有叶蔗杆12随圆盘割刀7的转动而进入到提升输送链8上,在辅助输送链28的协助下,有叶蔗杆12往后上方升移到一定高度时,有叶蔗杆12的根部通过导向槽10进入锥形落料口38,左、右传输夹持链9继续运行把有叶蔗杆12的尾部顺着有叶蔗杆扶架19放倒至有叶蔗杆托架18上。
37.所述有叶蔗杆横向喂入单元3的工作原理为:
38.倒下的有叶蔗杆12根部通过锥形落料口38下落而搁置在一侧的输送齿盘11的一个向上转动的拨蔗齿11-1内(下一根下落的有叶蔗杆12根部通过锥形落料口38下落而搁置在另一侧输送齿盘11的一个向上转动的拨蔗齿11-1中),随着输送齿盘11的向外转动,有叶蔗杆12被向左或向右横向传送,当有叶蔗杆12被传送至输送齿盘11外侧并即将滑出拨蔗齿11-1时,对应的弹射器24发生作用而将有叶蔗杆12的根部快速向对应的剥叶器拨喂。
39.所述弹射器24包括活动压杆、加速器复位弹簧、活动压杆复位弹簧和安装于输送齿盘11上圆周均布的控制杆(数量与拨蔗齿11-1的齿数一致),所述活动压杆由销轴安装于传动箱ⅰ27的后端面并由安装于输送齿盘11上的多根控制杆控制,输送齿盘11每旋转一周,弹射器24击发多次,从而保证有效地向剥叶器快速、准确地投喂有叶蔗杆12。
40.所述有叶蔗杆剥叶单元4的工作原理为:
41.所述输送齿盘11通过弹射器24向剥叶器投喂有叶蔗杆12时,对应的剥叶器在剥叶传动链20的带动下向前运动至投喂位置,开合机构33的开关杆41被开关压板40按压而将活动夹持链15向外打开,投喂的有叶蔗杆12进入由垂直夹持链13、水平夹持链14和活动夹持链15构成的的夹持工位,剥叶传动链20启动带动剥叶器向后运动,开合机构33的开关杆41离开开关压板40,拉伸弹簧ⅳ42回位将活动夹持链15向内关闭而与垂直夹持链13、水平夹持链14将有叶蔗杆12的根部夹持住,与此同时,垂直夹持链13和水平夹持链14同时启动运行且运行速度与剥叶传动链20的运行速度一致,因而在剥叶器向后移动的过程中,有叶蔗杆12的位置基本保持不动;与此同时,所述曲柄连杆机构36启动并通过升降架35带动多把“u”型剥叶刀16围绕着有叶蔗杆12快速地上、下摆动,伴随着夹持链组的移动,从而完成自有叶蔗杆12的根端向尾部的剥叶工作。
42.随着剥叶的进程,蔗杆的根部方向逐渐下垂而斜向弯曲蔗杆,此时连接横向悬臂21与传动箱ⅱ31的活动关节23发挥作用,使剥叶器可以摆动一定幅度而适应蔗杆的歪斜而顺利完成剥叶作业,当剥叶器向后剥叶至蔗杆的三分之二处时,夹持链组带动蔗杆尾部向外离开有叶蔗杆托架18。
43.所述无叶蔗杆收集单元5的运行方式为:
44.工作时,剥叶器剥净的无叶蔗杆37直接落到无叶蔗杆收集斗17内,无叶蔗杆37堆积到一定数量时,由于重心位置发生变化,无叶蔗杆收集斗17内的无叶蔗杆37会自动集中倾倒于地面上而等待后续的收集装车,清空无叶蔗杆37后,拉伸弹簧ⅰ25将无叶蔗杆收集斗17复原到初始位置。
45.本发明的作业流程步骤为:
46.1、收割机前进时,左、右绞龙6把倾斜、倒伏的甘蔗扶正,连同直立的甘蔗一起按图1所示的箭头方向喂入。
47.2、先由左、右传输夹持链9把甘蔗往后面拨送,随即圆盘割刀7切断甘蔗根部,被切断的有叶蔗杆12随圆盘割刀7转动进入提升输送链8,当有叶蔗杆12往后升移到一定高度
时,即有叶蔗杆12的根部通过导向槽10进入到锥形落料口38时,左、右传输夹持链9将有叶蔗杆12推倒,有叶蔗杆12的尾部顺着有叶蔗杆扶架19向后倒在有叶蔗杆托架18上。
48.3、有叶蔗杆12的根部通过锥形落料口38进入一输送齿盘11的拨蔗齿11-1内,输送齿盘11向外转动并配合弹射器24而迅速将有叶蔗杆12的根部拨进对应剥叶器的夹持链组的夹持位内,夹持链组夹紧有叶蔗杆12后启动并跟随剥叶器向有叶蔗杆12的尾部移动,夹持链组运行的线速度与剥叶器移动的线速度相同,从而保证了剥叶器在从前往后移动的过程中,它所夹持的有叶蔗杆12处于一个相对固定的位置,剥叶刀组在升降架35和拉伸弹簧ⅲ39的作用下高速上、下摆动于蔗杆上而进行剥叶。
49.4、剥叶器沿着有叶蔗杆12剥叶并行走到尾部时,由于有叶蔗杆12尾部较嫩脆弱,经受不了剥叶刀组的上、下碰撞而自然脱落,剥干净叶子的无叶蔗杆37掉落到下面的无叶蔗杆收集斗17内,无叶蔗杆37于无叶蔗杆收集斗17内堆积到一定数量时,由于重心位置发生变化,无叶蔗杆收集斗17内的无叶蔗杆37全部自动集中倾倒于地面上,等待后续的收集装车。
50.5、剥叶完毕后,剥叶器向前运行回位,重复作业流程步骤3、4,对下一根投喂的有叶蔗杆12进行剥叶和收集。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。