1.本实用新型涉及自动控制领域,具体涉及一种涂胶机器人用胶液自动控制系统。
背景技术:
2.自动控制是指在没有人直接参与的情况下,利用外加的设备或装置,使机器、设备或生产过程的某个工作状态或参数自动地按照预定的规律运行,自动控制是相对人工控制概念而言的,其中在涂胶机器人中需要通过自动控制系统对装有胶水的罐体内的胶水进行均匀搅拌,使胶水可以充分的融合在一起。
3.但是其在实际使用时,由于胶水具有一定的粘连性,在胶水内放入其他溶解液或黏合剂时,溶解液和黏合剂不能与胶水充分融合,同时搅拌之后的胶水容易堵塞出料口造成涂胶机器人无法正常工作。
4.因此,发明一种涂胶机器人用胶液自动控制系统来解决上述问题很有必要。
技术实现要素:
5.本实用新型的目的是提供一种涂胶机器人用胶液自动控制系统,通过导向环,导向环的两侧设置有弧形结构,使旋转轴在旋转的过程中带动搅拌杆旋转,使搅拌杆带动滑块在导向环的外壁滑动,搅拌杆的两端分别于旋转轴和滑块转动连接,使搅拌杆可以在搅拌槽内不规则旋转,从而可以对胶水上下两层进行搅拌,便于胶水、溶解剂和黏合剂混合,防止胶水出现分层,以解决技术中的上述不足之处。
6.为了实现上述目的,本实用新型提供如下技术方案:一种涂胶机器人用胶液自动控制系统,包括外壳,所述外壳内部开设有搅拌槽,所述外壳顶部设置有电动伸缩杆,所述电动伸缩杆顶部焊接有顶盖,所述顶盖顶部设置有伺服电机,所述伺服电机输出端设置有弹簧伸缩杆,所述弹簧伸缩杆一端焊接有旋转轴,所述旋转轴外壁设置有搅拌杆,所述搅拌杆内部设置有导向槽,所述搅拌杆一端设置有滑块,所述旋转轴底端设置有刮杆,所述旋转轴一端焊接有研磨块,所述研磨块外壁开设有研磨槽,所述搅拌槽内壁设置有导向环,所述外壳底部设置有下料管,所述下料管内壁开设有下料槽。
7.优选的,所述搅拌杆为橡胶材质制成,所述搅拌杆的数量设置为多个,多个所述搅拌杆环形阵列于旋转轴的外壁。
8.优选的,所述导向槽的数量设置为多个,多个所述导向槽等间距分布于搅拌杆的内部,所述导向槽的纵截面为直角三角形。
9.优选的,所述研磨槽为螺旋形设置,所述研磨槽的螺纹旋向与下料槽的螺纹旋向相反。
10.优选的,所述刮杆与搅拌槽滑动连接,所述刮杆的外壁与搅拌槽的内壁贴合,所述刮杆的纵截面为三角形。
11.优选的,所述导向环与滑块滑动连接,所述导向环为圆弧形设置,所述导向环两侧设置有弧形结构。
12.在上述技术方案中,本实用新型提供的技术效果和优点:
13.1、通过导向环,导向环的两侧设置有弧形结构,使旋转轴在旋转的过程中带动搅拌杆旋转,使搅拌杆带动滑块在导向环的外壁滑动,搅拌杆的两端分别于旋转轴和滑块转动连接,使搅拌杆可以在搅拌槽内不规则旋转,从而可以对胶水上下两层进行搅拌,便于胶水、溶解剂和黏合剂混合,防止胶水出现分层;
14.2、通过研磨槽,由于胶水之间会相互粘连,胶水进入到下料管之后被研磨块外壁的研磨槽进行切割,使胶水之间相互分离,防止涂胶机器人使用的胶水堵塞下料管。
附图说明
15.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
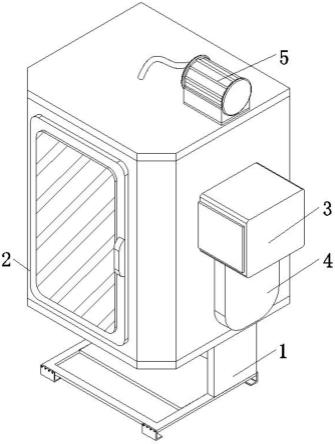
16.图1为本实用新型的立体图;
17.图2为本实用新型的立体剖面图;
18.图3为本实用新型的研磨块立体图;
19.图4为本实用新型的搅拌杆立体图。
20.附图标记说明:
21.1、外壳;2、搅拌槽;3、电动伸缩杆;4、顶盖;5、伺服电机;6、弹簧伸缩杆;7、旋转轴;8、搅拌杆;9、导向槽;10、滑块;11、刮杆;12、研磨块;13、研磨槽;14、导向环;15、下料管;16、下料槽。
具体实施方式
22.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面将结合附图对本实用新型作进一步的详细介绍。
23.本实用新型提供了如图1-4所示的一种涂胶机器人用胶液自动控制系统,包括外壳1,所述外壳1内部开设有搅拌槽2,所述外壳1顶部设置有电动伸缩杆3,所述电动伸缩杆3顶部焊接有顶盖4,所述顶盖4顶部设置有伺服电机5,所述伺服电机5输出端设置有弹簧伸缩杆6,所述弹簧伸缩杆6一端焊接有旋转轴7,所述旋转轴7外壁设置有搅拌杆8,所述搅拌杆8内部设置有导向槽9,所述搅拌杆8一端设置有滑块10,所述旋转轴7底端设置有刮杆11,所述旋转轴7一端焊接有研磨块12,所述研磨块12外壁开设有研磨槽13,所述搅拌槽2内壁设置有导向环14,所述外壳1底部设置有下料管15,所述下料管15内壁开设有下料槽16。
24.进一步的,在上述技术方案中,所述搅拌杆8为橡胶材质制成,所述搅拌杆8的数量设置为多个,多个所述搅拌杆8环形阵列于旋转轴7的外壁,所述导向槽9的数量设置为多个,多个所述导向槽9等间距分布于搅拌杆8的内部,所述导向槽9的纵截面为直角三角形,搅拌杆8可以对放入到搅拌槽2内的胶水进行搅拌,在搅拌杆8旋转的过程中,搅拌杆8带动导向槽9旋转,使导向槽9对胶水进行分割,使胶水之间不会相互粘连造成溶解剂或粘合剂无法进入到胶水内部。
25.进一步的,在上述技术方案中,所述研磨槽13为螺旋形设置,所述研磨槽13的螺纹旋向与下料槽16的螺纹旋向相反,通过研磨槽13和下料槽16可以对下料管15内的胶水进行
分割,防止胶水堵塞下料管15。
26.进一步的,在上述技术方案中,所述刮杆11与搅拌槽2滑动连接,所述刮杆11的外壁与搅拌槽2的内壁贴合,所述刮杆11的纵截面为三角形,通过刮杆11可以对附着在搅拌槽2底部的胶水进行分离,防止胶水附着在搅拌槽2的内部。
27.进一步的,在上述技术方案中,所述导向环14与滑块10滑动连接,所述导向环14为圆弧形设置,所述导向环14两侧设置有弧形结构,通过导向环14可以使搅拌杆8在旋转过程中可以上下移动,使搅拌槽2内的胶水可以均匀混合。
28.本实用工作原理:
29.参照说明书附图1-4,当需要对涂胶机器人的胶水进行混合时,自动控制系统启动电动伸缩杆3,然后将胶水的原材料倒入到搅拌槽2的内部,然后顶盖4与外壳1贴合对搅拌槽2进行密封,然后顶盖4在向下移动的过程中对弹簧伸缩杆6进行挤压,启动伺服电机5,使伺服电机5的输出端带动弹簧伸缩杆6旋转,弹簧伸缩杆6带动旋转轴7旋转,然后旋转轴7带动外壁的搅拌杆8旋转,使搅拌杆8带动滑块10在导向环14的外壁滑动,由于导向环14的外壁设置有两个弯折折结构,并且滑块10的两端分别于旋转轴7和滑块10转动连接,可以使滑块10垂直方向摆动,对搅拌槽2内的上层和下层的胶水进行搅拌;
30.参照说明书附图1-4,然后旋转轴7带动刮杆11对搅拌槽2底部内壁的胶水进行刮取,防止胶水粘连,然后搅拌完成的胶水进入到下料管15内,旋转轴7带动研磨块12旋转,研磨块12旋转带动研磨槽13,使研磨槽13与下料管15内的下料槽16之间相互摩擦,从而对胶水进行切割,防止胶水之间相互粘连,造成胶水堵塞下料管15,便于将胶水传说到涂胶机器人的出胶端,并且在胶水搅拌的过程中会有较为刺鼻的味道,在顶盖4底部设置有吸附棉,可以对胶水中的异味进行吸附。
31.以上只通过说明的方式描述了本实用新型的某些示范性实施例,毋庸置疑,对于本领域的普通技术人员,在不偏离本实用新型的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本实用新型权利要求保护范围的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。