技术特征:
1.一种涂胶机器人用胶液自动控制系统,包括外壳(1),其特征在于:所述外壳(1)内部开设有搅拌槽(2),所述外壳(1)顶部设置有电动伸缩杆(3),所述电动伸缩杆(3)顶部焊接有顶盖(4),所述顶盖(4)顶部设置有伺服电机(5),所述伺服电机(5)输出端设置有弹簧伸缩杆(6),所述弹簧伸缩杆(6)一端焊接有旋转轴(7),所述旋转轴(7)外壁设置有搅拌杆(8),所述搅拌杆(8)内部设置有导向槽(9),所述搅拌杆(8)一端设置有滑块(10),所述旋转轴(7)底端设置有刮杆(11),所述旋转轴(7)一端焊接有研磨块(12),所述研磨块(12)外壁开设有研磨槽(13),所述搅拌槽(2)内壁设置有导向环(14),所述外壳(1)底部设置有下料管(15),所述下料管(15)内壁开设有下料槽(16)。2.根据权利要求1所述的一种涂胶机器人用胶液自动控制系统,其特征在于:所述搅拌杆(8)为橡胶材质制成,所述搅拌杆(8)的数量设置为多个,多个所述搅拌杆(8)环形阵列于旋转轴(7)的外壁。3.根据权利要求1所述的一种涂胶机器人用胶液自动控制系统,其特征在于:所述导向槽(9)的数量设置为多个,多个所述导向槽(9)等间距分布于搅拌杆(8)的内部,所述导向槽(9)的纵截面为直角三角形。4.根据权利要求1所述的一种涂胶机器人用胶液自动控制系统,其特征在于:所述研磨槽(13)为螺旋形设置,所述研磨槽(13)的螺纹旋向与下料槽(16)的螺纹旋向相反。5.根据权利要求1所述的一种涂胶机器人用胶液自动控制系统,其特征在于:所述刮杆(11)与搅拌槽(2)滑动连接,所述刮杆(11)的外壁与搅拌槽(2)的内壁贴合,所述刮杆(11)的纵截面为三角形。6.根据权利要求1所述的一种涂胶机器人用胶液自动控制系统,其特征在于:所述导向环(14)与滑块(10)滑动连接,所述导向环(14)为圆弧形设置,所述导向环(14)两侧设置有弧形结构。
技术总结
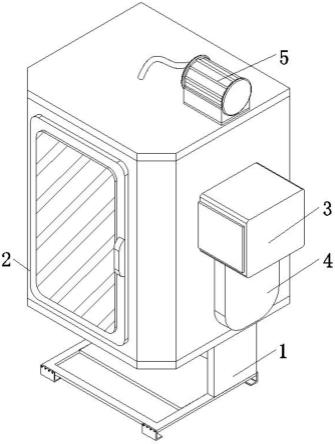
本实用新型公开了一种涂胶机器人用胶液自动控制系统,包括外壳,所述外壳内部开设有搅拌槽,所述外壳顶部设置有电动伸缩杆,所述电动伸缩杆顶部焊接有顶盖,所述顶盖顶部设置有伺服电机,所述伺服电机输出端设置有弹簧伸缩杆,所述弹簧伸缩杆一端焊接有旋转轴,所述旋转轴外壁设置有搅拌杆,所述搅拌杆内部设置有导向槽。本实用新型通过导向环,导向环的两侧设置有弧形结构,使旋转轴在旋转的过程中带动搅拌杆旋转,使搅拌杆带动滑块在导向环的外壁滑动,搅拌杆的两端分别于旋转轴和滑块转动连接,使搅拌杆可以在搅拌槽内不规则旋转,从而可以对胶水上下两层进行搅拌,便于胶水、溶解剂和黏合剂混合,防止胶水出现分层。防止胶水出现分层。防止胶水出现分层。
技术研发人员:逄政
受保护的技术使用者:上海拔山自动化技术有限公司
技术研发日:2021.11.24
技术公布日:2022/7/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。