1.本实用新型涉及智能婴儿车领域,具体是一种智能婴儿车控制系统。
背景技术:
2.为了更好的服务社会,使人们获得更好的生活体验,更舒适地培育下一代,最大程度的节约人工陪护成本,各国都在不断地研发各种功能的智能婴儿车。目前所存在的智能婴儿车是在蓝牙婴儿车的基础上,集合一些人工智能技术,使婴儿车能够自动避障、远程操控,自动导航等一系列功能。
3.智能婴儿车融合了大量的自动化技术,通过对外界环境信息的识别和处理,进而发出相应的控制指令,以实现避障、导航等功能。其控制系统不仅要有足够快的处理速度,还要有足够高的正确度,目前常用的控制算法有最优控制算法、模糊控制算法、pid路径跟踪算法和神经网络控制算法等。在实际应用中通常采用多种算法相融合来达到最佳的控制性能。所以现代智能婴儿车整个控制系统发展趋势为模块化、分级控制来达到整体控制的目的。
4.智能婴儿车作为移动机器人的另一种形式,集成了大量的智能机器人技术。婴儿车研究的核心目的是为了为使用者提供方便,所以婴儿车的自主避障问题就是其研究的核心。要实现智能婴儿车的避障就需要不同的传感器对周围环境进行感知。由于智能婴儿车的周围环境是不断变化的所以就要求不同的传感器对周围环境信息进行实时采集传递,所以为了有效的利用这些信息就要对其综合处理、融合。
5.智能婴儿车的人机交互接口必须有科学合理的设计控制界面,不仅要考虑使用者的特殊情况,还要具有操作简单、便捷、合理等一些特点。目前所设计的智能婴儿车中提出多种人机交互方式如:操推杆控制、菜单控制、语音控制等,每种控制方式都有自己独特的优势,所一般在一个控制系统中采用多种控制方式,来适应不同的使用人群。
技术实现要素:
6.本实用新型的目的是提供一种智能婴儿车控制系统,其利用先进低功耗控制芯片、高精度传感器、gps模块、超声波模块、wifi通信模块、摄像模块,实现婴儿车的自动感知、自动避障、无线通信、gps定位、远程监控和操控等多种功能。
7.本实用新型的目的通过以下技术方案实现:
8.一种基于智能婴儿车控制系统,主要由主控芯片、传感器模块、电机驱动模块、人机交互模块、gps模块、wifi通信模块、摄像模块、报警电路、电源电路、时钟电路、复位电路等部分组成。openmv摄像头固定在车体的前方,与元件盒内的控制系统连接;元件盒垂直连接在坐垫下方;推杆电机下方与直流电机底座进行连接,两侧的直流电机底座内安装有两个水平方向的直流电机。
9.进一步的摄像头水平连接在元件盒的正前方,摄像头获取前方信息。
10.进一步的mpu-6050三轴陀螺仪角度传感器与车轮水平连接,角度传感器起定位、
通信、报警作用。
11.进一步的推杆电机通过紧固螺丝分别固定在婴儿车后面两个车轮上。控制婴儿车时采用的是速度闭环和方向闭环,把两边电机的差值作为被控对象进行控制,输入是车身角度,当走直线就按预期值为0进行控制,当你要转弯的时候设定某个角度即可,从而实现电动婴儿车的前进、后退和转向。
12.进一步的操纵杆和按键安装在扶手位置,触摸屏通过螺丝连接在触摸开关右侧。风扇(2)固定在顶棚中心。
13.本实用新型与现有技术相比,具有以下有益效果:
14.通过抗干扰性强的低功耗微处理器stm32f103c8t6对数据进行安全可靠的处理;其操纵方式多样,有操纵杆、按键和触摸屏三种操纵方式,可人为选择;具有gps定位功能,且能将位置信息、婴儿车信息、报警信息通过gprs发送给监护者;具有超远程控制功能,wifi网络覆盖,皆可控制;采用基于模糊控制的避障算法,使婴儿车的自动避障更平滑、精确。
附图说明
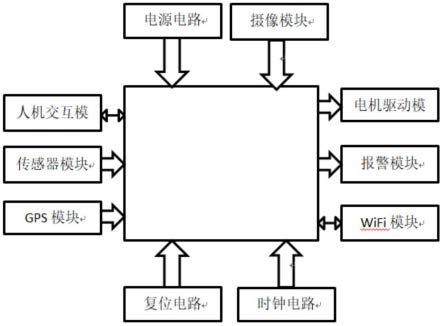
15.图1为:一种智能婴儿车控制系统的总体结构图。
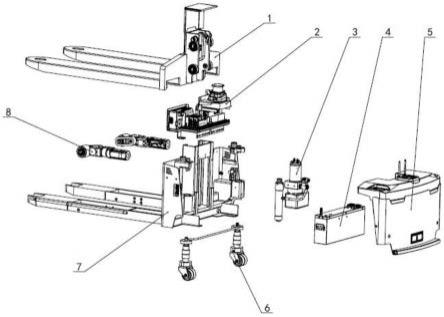
16.图2为:一种智能婴儿车控制系统的婴儿车结构示意图。
17.图3为:一种智能婴儿车控制系统的避障算法原理框图。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
19.如图1所示,本实用新型主要由七个部分组成:主控芯片、传感器模块、人机交互模块、电机驱动模块、gps模块、wifi通信模块、报警模块、摄像模块。
20.在工作过程中,婴儿车使用者可选择不同人机交互方式;传感器模块采集婴儿车自身和外部环境的信息,经主控芯片分析处理后,电机驱动模块控制通过宽窄螺丝连接在两个后车轮上的摇杆电机,从而推动车轮行走;gps模块可获得婴儿车的位置信息;wifi通信模块实现婴儿车和使用者之间短距离的无线通信以及和监护者之间长距离的无线通信,短距离的无线通信主要是用来设置婴儿车相关参数,长距离的无线通信是将位置信息、婴儿车信息、报警信息发送给监护者;角度传感器与车轮水平连接,测量婴儿车的运动过程中的倾斜角度,当婴儿车运动过程中发生倾倒时候,控制器将对智能婴儿车进行紧急制动并进行本地报警,同时wifi通信模块发送报警信息到监护者手机端;超声波传感器采集障碍物的间距,主控芯片利用自动避障算法进行自动避障。
21.如图2所示,图中:1车轮、2触摸开关、3风扇、4直流电机底座、5元件盒、6推杆电机、7摄像头、8扶手左侧。主控芯片和电源电路、复位电路、时钟电路安装在元件盒5内部,组成主控芯片的最小电路;电机驱动模块安装也在元件盒5内部,用来驱动左右车轮1电机;人机交互模块操纵杆和按键安装在扶手8位置;超声波传感器有二个,分别安装在扶手左侧8、座
椅前侧5位置,测量婴儿车距离障碍物的间距,利用避障算法进行自动避障;角度传感器安装在车轮1位置,测量婴儿车的运动过程中的倾斜角度;gps模块、wifi通信模块和报警模块均安装在元件盒5位置,用来定位、通信和报警;摄像头7安装在直流电机底座4位置,读取婴儿车前部信息;推杆电机6安装在后车轮1侧边,用于推动车轮行走;所有模块均通过有线和主控芯片相连,布线时注意隐蔽性,最后主控芯片部分封装起来,其gps模块和wifi通信模块、报警模块可封装在一起固定,在实验过程中,不会出现松动,更加稳定,使实验过程更安全可靠,实验数据更准确。
22.如图3所示,本实用新型的自动避障算法主要是基于模糊控制理论的避障算法,它将超声波传感器采集的婴儿车前进方向的前方、左侧、右侧三个位置的障碍物信息和婴儿车前进目标方向作为输入量,进行模糊推理和解模糊,从而得到婴儿车的转动角度和电机速度来控制电机,实现智能婴儿车的自动避障目的。
23.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
24.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。