1.本技术涉及农业机械技术领域,具体涉及一种套袋装置。
背景技术:
2.在水果或蔬菜的培育过程中,为解决防虫、防菌以及减少农药残留等问题,通常会在水果或蔬菜的果实在生长或成熟期间在果实上套设育果袋。
3.套袋作业通常包括取袋、张袋和套袋三个步骤,由于目前的套袋作业全部由人工操作,导致套袋作业费时费力而且效率低下。
技术实现要素:
4.本技术的目的是提供一种套袋装置,以解决现有套袋作业费时费力且效率低下的问题。
5.本技术的技术方案为:
6.套袋装置,包括用于存放育果袋的储袋机构;以及
7.取张袋机构,所述取张袋机构对应于所述储袋机构设置,用于获取所述储袋机构中的所述育果袋,并控制所述育果袋张袋。
8.优选的,所述储袋机构包括用于容纳所述育果袋的储袋空间,所述储袋空间开设有取袋口;
9.所述取张袋机构设置在所述储袋空间开设所述取袋口的一侧;
10.所述取张袋机构包括取张袋支架、设于所述取张袋支架上的至少一个第一吸附件以及第一驱动件,所述第一驱动件控制所述取张袋支架带动所述第一吸附件移入或移出所述取袋口。
11.优选的,所述第一吸附件沿所述套袋装置的x轴方向分布在所述取张袋机构的中间,所述第一吸附件用于吸附所述育果袋靠近所述取张袋机构的一面;
12.所述取张袋机构还包括设置在所述第一吸附件两侧的至少一对第二吸附件,所述第二吸附件位于所述取张袋支架和所述储袋机构之间,用于吸附所述育果袋背离所述取张袋机构的一面。
13.优选的,所述取张袋机构还包括顶袋结构,所述顶袋结构靠近所述第二吸附件设置,所述顶袋结构的端部沿所述z轴方向超过所述第二吸附件,且所述顶袋结构在所述y轴方向的距离小于所述第二吸附件之间的距离;
14.所述顶袋结构与所述第二吸附件固定在条形支架上,所述条形支架沿所述x轴方向跨越所述取袋口。
15.优选的,所述取张袋机构还包括打底结构,所述打底结构包括沿y轴方向设置在所述储袋机构两侧的打底臂、设于所述打底臂前端的打底杆、用于驱动所述打底臂的第二驱动件以及用于控制所述打底臂复位的第一复位件;
16.所述打底杆沿所述z轴方向延伸,所述第二驱动件用于驱动所述打底臂克服所述
第一复位件的作用力,使所述打底杆沿所述y轴方向相互靠拢,以推动所述育果袋的两侧面。
17.优选的,所述第一吸附件用于吸附所述育果袋的靠近所述取张袋机构的一面的第一位置,所述第一位置位于所述育果袋宽度方向的中垂线上,且所述第一位置与所述育果袋底部的最近距离为1/2至7/8的张袋距离;
18.所述第二吸附件用于吸附所述育果袋的背离取张袋机构的一面的第二位置,所述第二位置和所述第一位置分别与所述育果袋侧面的距离之和大于所述张袋距离,且所述第二位置与所述育果袋底部的最近距离为1/2至7/8的张袋距离;
19.所述打底杆用于接触所述育果袋的侧面的第三位置,所述第三位置距离所述育果袋底部为1/4至6/5的张袋距离;
20.所述张袋距离为所述育果袋张袋后,所述育果袋的靠近所述取张袋机构的一面和远离所述取张袋机构的一面之间的距离。
21.优选的,所述第一驱动件包括皮带传动结构和第一电机,所述皮带传动结构沿所述z轴方向设置,且与所述取张袋支架固定连接;所述第一电机通过驱动所述皮带传动结构带动所述取张袋支架移动;
22.所述第二驱动件为推拉式电磁铁,所述推拉式电磁铁安装在所述打底臂的后方。
23.优选的,所述套袋装置还包括封口机构,所述封口机构包括沿所述套袋装置的y轴方向设于所述储袋机构两侧的封口支撑板、沿所述y轴方向设于所述储袋机构两侧的封口臂、安装在所述封口臂前端的折叠杆;
24.所述封口支撑板可相对于所述储袋机构前后移动,用于沿所述套袋装置的z轴方向支撑起所述育果袋的一面;
25.所述封口臂用于带动所述折叠杆靠近所述封口支撑板以及带动所述折叠杆和所述封口支撑板后移;
26.所述折叠杆可转动的安装在所述封口臂上,包括沿所述y轴方向延伸的翻折部;所述翻折部沿所述z轴方向支撑起所述育果袋的另一面,并带动所述育果袋的另一面翻折至所述封口支撑板远离所述育果袋的一面。
27.优选的,所述封口臂通过第一铰接结构和第二铰接结构安装在所述套袋装置上;
28.所述第一铰接结构位于封口臂的后端,由相互配合的第一铰接柱和第一铰接孔构成;所述第二铰接结构位于第一铰接结构和折叠杆之间,由相互配合的第二铰接柱和第二铰接孔构成;
29.所述第一铰接孔包括转动限位部以及位于所述转动限位部后方的移动限位部;所述转动限位部用于限制所述封口臂带动所述折叠杆靠近所述封口支撑板,移动限位部和所述第二铰接孔用于限制所述封口臂带动所述折叠杆和所述封口支撑板后移;
30.所述封口臂的前端还设有挡块,所述挡块于所述折叠杆靠近所述封口支撑板时,所述挡块抵接于所述封口支撑板前端;
31.所述封口支撑板上设有第二复位件,所述第二复位件用于驱动所述封口支撑板前移。
32.优选的,所述封口机构还包括用于驱动所述封口臂的第三驱动件以及用于驱动所述折叠杆的第四驱动件;所述第三驱动件为固定在所述封口臂上方的第二电机,所述第三
驱动件通过第一牵引绳连接至所述封口臂的前部;
33.所述第四驱动件为固定在所述封口臂后端的推拉式电磁铁,所述第四驱动件通过第二牵引绳与所述折叠杆上固定的转动块连接;
34.所述封口臂上还设有第三复位件和第四复位件;所述第三复位件用于控制所述封口臂的前端远离封口支撑板,所述第四复位件用于驱动所述封口臂前移;
35.所述折叠杆上还设有第五复位件,所述第五复位件用于控制所述折叠杆保持翻折前的状态。
36.优选的,所述套袋装置还包括限位锁紧机构,所述限位锁紧机构包括铰接在所述封口支撑板后方的锁紧块以及安装在所述锁紧块上的第六复位件,所述第六复位件用于在所述封口支撑板后移时,驱动所述锁紧块的前端伸入到所述封口支撑板上的锁紧口中。
37.优选的,所述限位锁紧机构还包括与所述锁紧块联动的解锁块以及安装在所述锁紧块上的第七复位件;
38.所述解锁块铰接在所述锁紧块的后方;所述第七复位件用于驱动所述解锁块的后端与所述取张袋机构发生干涉;所述取张袋机构获取所述储袋机构中的所述育果袋的同时,通过所述解锁块带动所述锁紧块的前端移出所述锁紧口。
39.本技术在套袋装置中设置取张袋机构,并利用取张袋机构完成取袋和张袋的操作,能够节省人力且提高工作效率。本技术通过将取张袋机构和储袋机构沿z轴方向设置,使取张袋支架上的第一吸附件能够直接伸入到储袋机构中完成取袋操作,相较于利用传送带输送育果袋的传统取袋装置,本技术能够避免出现卡袋或同时传送多个袋子的情况。并且本技术仅在取张袋支架与储袋机构之间增加一组第二吸附件,即可使取张袋机构实现张袋操作,其结构简单,且无需占用额外的安装空间,能够有效减小体积,减轻重量、降低成本。
40.本技术的封口机构将封口支撑板与折叠杆设计可前后移动的结构,利用折叠杆配合封口支撑板对育果袋进行一次封口操作后,通过控制折叠杆与封口支撑板后移,使封口机构能够对育果袋进行两次甚至多次折叠,以保证封口的牢固性。
附图说明
41.图1是为育果袋的结构示意图。
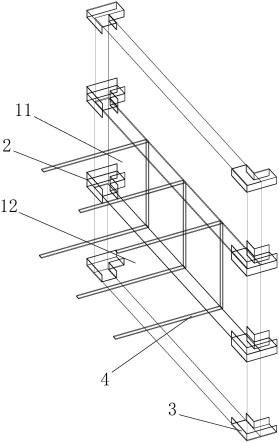
42.图2是套袋装置在初始状态下的结构示意图。
43.图3是储袋机构中的活动板的结构示意图。
44.图4是取张袋机构与壳体的装配结构示意图。
45.图5是取张袋机构卸下顶袋结构后的结构示意图。
46.图6是打底机构的结构示意图。
47.图7是取张袋机构在壳体的结构示意图。
48.图8是取张袋机构的部分结构示意图。
49.图9是封口臂的内部结构示意图。
50.图10是限位锁紧机构的结构示意图。
51.图11是第一次封口过程中封口支撑板与折叠杆靠拢时的结构示意图。
52.图12是第一次封口过程中折叠杆向后翻转时的结构示意图。
53.图13是第二次封口过程中折叠杆和封口支撑板后移时的结构示意图。
54.图14是第二次封口过程中折叠杆向后翻转时的结构示意图。
55.图中,壳体10、套袋口11、第一铰接孔12、转动限位部121、移动限位部122、第二铰接柱13、储袋空间21、活动板22、挡板23、推板24、锁紧开关25、把手26、取张袋机构30、取张袋支架31、第一平行架311、第二平行架312、第一吸附件32、第二吸附件33、条形支架34、顶袋结构35、打底结构36、打底臂361、打底杆362、第二驱动件363、第一驱动件37、第一电机371、皮带传动结构372、导向结构38、封口支撑板40、压板401、锁紧口402、封口臂41、第一铰接柱411、第二铰接孔412、挡块413、折叠杆42、第三驱动件43、第一牵引绳431、第四驱动件44、第二牵引绳441、转动块 442、锁紧块50、第三牵引绳501、解锁块51。
具体实施方式
56.需要说明的是,如图1和图2所示,为了方便描述,本公开的实施例的附图中设置有坐标系xyz,x轴、y轴、z轴的具体指示方向如图2中的坐标系所示。其中,x轴的方向代表套袋装置及其零部件的前后方向,即在套袋装置放置有育果袋的状态下,育果袋的长度方向,y轴的方向代表套袋装置及其零部件的两侧方向,即在套袋装置放置有育果袋的状态下,育果袋的宽度方向;z轴的方向代表套袋装置及其零部件的竖向,即套袋装置放置有育果袋时,育果袋的展开方向。
57.本技术中,套袋装置及其零部件的“前”、“前端”、“前部”等方位词为轴的正方向,“后”、“后端”、“后部”等方位词为x的负方向。
58.如图2至图4所示,本技术提供了一种套袋装置,包括壳体10以及位于壳体10内的储袋机构和取张袋机构30。在本实施例中,壳体10在前端开设有供果实伸入的套袋口11。
59.具体的,如图2至图4所示储袋机构包括呈盒状的储袋空间21,用于存储育果袋;储袋空间21沿z轴方向(即套袋装置中放入育果袋时,育果袋的展开方向)开设有取袋口,取张袋机构30通过取袋口完成取袋操作。
60.储袋空间21的底部设置有活动板22,活动板22铰接在壳体10上,使活动板22能够相对于壳体10以铰接端为轴转动。当活动板21被打开,即活动板21相对于储袋空间21转动,并在壳体10的底部形成开口,以便于向储袋空间21中添加育果袋。
61.在本实施例中,活动板22的后端铰接在壳体10上,活动板22的前端通过锁紧开关25 与壳体10的前端面连接,具体的,本实施例中的锁紧开关25优选用卡扣。为方便操作,在活动板22上还设有把手26。如图3所示,为方便对活动板22上的育果袋进行限位,在活动板22的后部及两侧还设有挡板23。另外,活动板22上还设有推板24,推板24用于推动育果袋靠近取袋口,以方便取张袋机构30与育果袋接触。
62.如图4和图5所示,本技术的取张袋机构30与储袋机构沿z轴方向(即套袋装置中放入育果袋时,育果袋的展开方向)分布,具体地,取张袋机构30位于储袋机构开设取袋口的一侧。取张袋机构30包括取张袋支架31,取张袋支架31可在第一驱动件37的作用下,沿z 轴方向靠近或远离储袋机构的储袋空间21的取袋口。在本实施例中,如图5所示,取张袋支架31上设有第一吸附件32;在取张袋支架31靠近储袋机构时,第一吸附件32能够经取袋口伸入到储袋机构内部,并吸附于育果袋朝向取张袋机构30的一面。
63.在本实施例中,第一吸附件32设置在取张袋机构沿y轴方向的中间位置,且沿x轴
方向分布。取张袋机构30至少包括一个设置在取张袋支架31上的第一吸附件32,本实施例的第一吸附件32相对于育果袋宽度的中垂线方向分布。具体的,本实施例中取张袋机构30包括有两个第一吸附件32,当两个第一吸附件32与育果袋接触时,其位于后方的第一吸附件 32的边缘与育果袋底部为1/2至7/8的张袋距离,位于前方的第一吸附件32与育果袋的接触位置为靠近育果袋的开口的位置。需要说明的是,本实施例将第一吸附件32与育果袋的接触位置定义为育果袋的第一位置,当第一吸附件32的数量至少为2个时,位于最后方的第一吸附件32的边缘与育果袋底部的距离为1/2至7/8的张袋距离,即第一位置与育果袋底部的最近距离为1/2至7/8的张袋距离;当第一吸附件32的数量只有一个时,该第一吸附件的边缘距离育果袋底部为1/2至7/8的张袋距离。育果袋的张袋距离为育果袋张袋后时,育果袋朝向取张袋机构30的一面与育果袋背离取张袋机构30的一面的距离。
64.具体的,如图5所示,取张袋支架31呈梯形的框架状,具体包括沿x轴方向呈前后分布第一平行架311和第二平行架312以及用于连接第一平行架311和第二平行架312的两根倾斜架。在本实施例中,第一平行架311位于前方,用于安装第一吸附件32,第二平行架312 用于连接第一驱动件37。两个第一吸附件32通过与第一平行架311在xy轴平面上相垂直的支架与第一平行架311固定连接。需要说明的是,本技术的取张袋支架31的结构并不限于本实施例中描述的框架状,取张袋的形状和第一吸附件32的安装方式均可按照实际需求作适应性改变。
65.在本实施例中,取张袋机构30还包括第二吸附件33,第二吸附件33安装在储袋机构与取张袋支架31之间,用于吸附育果袋背离取张袋机构30的面。为方便描述,本实施例将育果袋朝向取张袋机构30的面简称为育果袋的第一面,将育果袋的背离取张袋机构30的面简称为育果袋的第二面。
66.在本实施例中,取张袋机构30包括沿y轴方向对称分布在第一吸附件32两侧的至少一对第二吸附件33,且第二吸附件33位于取张袋机构30与储袋机构之间,使第二吸附件33 能够与育果袋的第二面接触,并吸附育果袋的第二面。
67.具体的,取张袋机构30具有一对第二吸附件33,为保证第二吸附件33配合第一吸附件 32使育果袋成功张袋。第二吸附件33的边缘与育果袋侧面的距离加上第一吸附件32的边缘与育果袋侧面的距离需大于育果袋的张袋距离,且第二吸附件33的边缘与所述育果袋底部的距离为1/2至7/8的张袋距离。
68.本实施例将该第二吸附件33与育果袋的接触位置定义为育果袋的第二位置,即第二位置和第一位置分别与育果袋侧面的距离之和大于张袋距离。需要说明的是,由于本实施例中只有一对第二吸附件33,该第二吸附件33的边缘与育果袋底部的距离即为第二位置与纸袋底部的最近距离。当第二吸附件33的数量为至少两对时,位于最后方的一对第二吸附件33的边缘与育果袋侧面的距离为1/2至7/8的张袋距离,即第二位置与所述育果袋底部的最近距离为1/2至7/8的张袋距离。
69.本实施例中的两个第二吸附件33固定安装在两个条形支架34上。其中,两个条形支架 34沿x轴方向跨越储袋机构的储袋空间21的取袋口,两个条形支架34之间留有间距供第一吸附件32穿过。在本实施例中,第一吸附件32和第二吸附件33优选采用吸盘。
70.为了便于理解本技术的技术方案,现具体描述本实施例中的套袋装置的取袋过程及张袋过程。
71.在取袋过程中,首先通过第一驱动件37控制取张袋支架31向储袋机构靠近,取张袋支架31上的第一吸附件32先从两个第二吸附件33之间穿过,再穿过储袋机构的取袋口并伸入到储袋机构内部;然后利用取张袋支架31上的第一吸附件32与育果袋的第一面接触,并吸附住育果袋;最后控制取张袋支架31远离储袋机构,使育果袋跟随第一吸附件32依次穿过取袋口和两个第二吸附件33,并移动到取张袋支架31与第二吸附件33之间。
72.在育果袋从两个第二吸附件33之间穿过时,育果袋在两条形支架34的干涉下发生弹性变形,育果袋的中部向上拱起,育果袋的两侧相互靠拢,从而保证育果袋能够穿过两个条形支架34;当育果袋穿过两个条形支架34后,育果袋的两侧向外伸展而恢复平整状态。
73.在张袋过程中,首先通过第一驱动件37控制取张袋支架31带着育果袋朝向第二吸附件 33方向移动,同时第二吸附件33吸附住育果袋的第二面;然后控制取张带机构远离第二吸附件33,从而使育果袋张开。
74.本技术通过将取张袋机构30和储袋机构沿z轴方向(即套袋装置中放入育果袋时,育果袋的展开方向)设置,使取张袋支架31上的第一吸附件32能够直接伸入到储袋机构中完成取袋操作。相较于利用传送带输送育果袋的传统取袋装置,本技术利用吸盘直接吸取育果袋,能够避免出现卡袋或者出现同时传送多个育果袋的情况。并且本技术仅在取张袋支架31与储袋机构之间增加一对第二吸附件33,即可使取张袋机构30实现张袋操作,其结构简单,且无需占用额外的安装空间,能够有效减小体积,减轻重量、降低成本。
75.由于育果袋通常为纸袋或无纺布袋,当第一吸附件32沿x轴方向吸附住育果袋中间时,育果袋的两侧会自然下垂,在张袋过程中,取张袋支架31带动育果袋朝向第二吸附件33移动时,第二吸附件33可能无法与育果袋的两侧接触。为解决这一问题,在本实施例中,取张袋机构30还包括靠近第二吸附件33设置的顶袋结构35,顶袋结构35用于在育果袋与第二吸附件33接触时,支撑起育果袋的第二面,使育果袋保持平整状态,以保证第二吸附件33 精准吸附在育果袋上。
76.具体的,本实施例中的顶袋结构35为设置在条形支架34上的顶袋柱,顶袋柱远离条形支架34一端的端部沿z轴方向略超过第二吸附件33,且两个顶袋柱之间的距离略小于两个第二吸附件33之间的距离。在张袋过程中,取张袋支架31带动育果袋朝向第二吸附件33移动时,育果袋会先与顶袋柱接触,顶袋柱支撑起育果袋的两侧,使育果袋的两侧向外伸展以保证育果袋以平整状态与第二吸附件33接触,从而保证第二吸附件33与育果袋接触位置的精确性。在一些实施例中,顶袋结构35还可以为壳体10或第二吸附件33安装座等零部件上形成凸起结构。
77.如图4和图6所示,取张袋机构30还包括打底结构36,打底结构36包括沿y轴方向设置在储袋机构两侧的打底臂361;两个打底臂361采用铰接的方式安装在壳体10上,打底臂 361的一端设有打底杆362,打底杆沿z轴方向延伸。打底结构36还包括用于驱动打底臂361 的第二驱动件363,在育果袋的第一面与育果袋的第二面分开后,第二驱动件363驱动打底臂361沿铰接处在x轴y轴形成的平面上实现转动,使打底臂361上的打底杆362相互靠近,以推动育果袋的两侧面,从而使育果袋定型。打底结构36还包括第一复位件,第一复位件用于驱动打底臂361使打底杆362相互远离,使打底杆362远离育果袋。本实施例中的打底杆 362设置在打底臂361的前端,第一复位件为设置在铰接处的扭簧,在一些实施例中,第一复位件可以为安装在壳体10与打底臂361之间的拉力弹簧或推力弹簧。在本实施例中,打底杆
362与育果袋的接触位置与育果袋底部的距离为1/4至5/6的张袋距离,本实施例将打底杆 362与育果袋接触的位置定义为育果袋的第三位置。
78.在一些实施例中,打底结构36可通过推动育果袋底部的方式使育果袋定型。具体的,打底结构36包括设于储袋机构后方的打底板,通过驱动打底板推动育果袋底部,也能够使育果袋定型。
79.在本实施例中,如图5所示,第一驱动件37包括沿z轴方向延伸的皮带传动结构372 以及用于驱动皮带传动结构372的第一电机371。取张袋支架31固定在皮带上,通过第一电机371的正反转带动皮带轮沿顺时针或逆时针方向转动,使传动轮带动整个皮带传动结构372 运行。皮带传动结构372中的传动带即可带动取张袋支架31沿z轴方向实现上下移动。为方便安装,本实施例的第一驱动件设置在壳体的后部,一些实施例将第一驱动将安装在壳体10 的侧壁上。第二驱动件363优选用推拉式电磁铁,推拉式电磁铁安装壳体对应打底臂361后方的部分。
80.在一些实施例中,第一驱动件37可以为与电机配合的齿轮齿条传动结构,或者与电机配合的连杆结构等能够驱动取张袋支架31移动的常见结构。
81.本技术的取张袋机构30还包括用于对取张袋支架31进行导向的导向结构38。在本实施例中,导向结构38优选采用沿z轴方向延伸的导向杆,取张袋支架31上开设有与导向杆适配的导向槽。导向杆穿设在导向槽中,能够保证张袋支架31在z轴方向上的移动平稳。
82.在本实施例中,若第一吸附件32和第二吸附件33接触育果袋的位置与育果袋底部的距离较近,则育果袋容易从第一吸附件32和第二吸附件33上脱落;若第一吸附件32和第二吸附件33接触育果袋的位置与育果袋底部的距离较远,则育果袋的底部不易张开。本实施例的两个第二吸附件33与第一吸附件32相互配合,助于将育果袋完全张开。在本实施例中,打底杆362与育果袋的接触位置离育果袋底部的距离过近和过远均无法使育果袋有效定型,而本实施例中的打底杆能够与第一吸附件和第二吸附件相互配合,使育果袋定型。需要说明的是,为将育果袋的底部封口,部分育果袋的底部具有约10mm的粘接区域,本实施例中记载的与育果袋的底部距离不包括粘接区域。
83.如图7至图14所示,本技术的套袋装置还包括封口机构,封口机构包括沿y轴方向设置在储袋机构两侧的封口支撑板40、封口臂41以及安装在封口臂41前端的折叠杆42。封口支撑板40可前后移动的安装在储袋机构的两侧;封口支撑板40用于沿z轴方向支撑起育果袋的一面。封口臂41用于带动折叠杆42移动并靠近封口支撑板40以及带动折叠杆42和封口支撑板40后移。折叠杆42可转动的安装在封口臂41上,折叠杆42包括沿y轴方向延伸的翻折部;翻折部沿z轴方向支撑起育果袋的另一表面,并带动育果袋的另一表面翻折至封口支撑板40远离远离育果袋的一面。
84.本实施例的封口机构与前述的取张袋机构30配合使用。具体的,如图7-8所示,封口支撑板40设于取张袋机构30前方,封口支撑板40包括与壳体10可移动连接的滑动部分以及沿y轴方向朝壳体10内部延伸的压板401,压板401用于支撑育果袋的第一面。本实施例的滑动部分可选择采用滑槽或滑轨结构安装在壳体10上。在一些实施例中,可选择在滑动部分穿设导柱的方式将滑动部分与壳体10连接。为方便封口支撑板40复位,封口机构还包括设置在滑动部分和壳体10之间的第二复位件,第二复位件可选择常规的推拉弹簧或拉力弹簧。
85.在本实施例中,封口机构还包括封口臂41以及安装在封口臂41前端的折叠杆42,封口臂41沿y轴方向安装在储袋机构的两侧。在第三驱动件43的作用下,封口臂41能够带动折叠杆42朝向封口支撑板40方向移动,以及带动折叠杆42和封口支撑板40向后移动。为方便封口臂41复位,封口机构还包括第三复位件和第四复位件。第三复位件用于控制封口臂 41的前端远离封口支撑板40,第四复位件用于驱动封口臂41前移。
86.在本实施例中,折叠杆42呈“z”形,依次包括翻折部、与翻折部垂直设置的过渡部以及与翻折部平行设置的转动安装部。本实施例中,如图8所示,封口臂41呈中空状,转动安装部可转动地设置在封口臂41的前端,翻折部沿y轴延伸。封口臂41上设有第四驱动件44 以控制折叠杆42转动。翻折部用于支撑育果袋的第二面,并以转动安装部为原点,向后方翻转。为方便折叠杆42复位,封口机构还包括设于封口臂41和折叠杆42之间的第五复位件,第五复位件用于控制折叠杆42保持向后翻转前的状态。
87.在本实施例中,封口臂41上还设有挡块413,在折叠杆42靠近封口支撑板40时,挡块 413与封口支撑板40的前端抵接,以保证封口支撑板40能够与封口臂41同步向后移动。
88.图11为第一次封口过程中封口支撑板40与折叠杆42靠拢时的结构示意图;图12为第一次封口过程中折叠杆42向后翻转时的结构示意图。如图11和图12所示,在第一次封口的过程中,首先利用第三驱动件43控制封口臂41带动折叠杆42朝封口支撑板40移动,使折叠杆42带动育果袋的第二面向育果袋的第一面靠拢,使封口支撑板40压在第一面上;然后利用第四驱动件44控制折叠杆42向后翻转,使折叠杆42带动育果袋的第二面靠近开口的部分翻折至育果袋的第一面上。最后折叠杆42在第五复位件的带动下复位。
89.图13为第二次封口过程中折叠杆和封口支撑板后移时的结构示意图。图14为第二次封口过程中折叠杆向后翻转时的结构示意图。如图13和图14所示,在第二次封口的过程中,首先利用第三驱动件43控制封口臂41带动封口支撑板40和折叠杆42向后移动;然后利用第四驱动件44控制折叠杆42向后翻转,使折叠杆42再次带动育果袋的第二面靠近开口的部分翻折至育果袋的第一面;最后折叠杆42在第五复位件的带动下复位。
90.在第一次封口过程中,封口臂41未向后移动,压板401的前部与育果袋的接触位置形成第一次折痕;在第二次封口过程中,封口臂41向后移动,压板401的前部与育果袋的接触位置形成第二次折痕。以此类推,本实施例的封口机构能够对育果袋的开口进行两次甚至多次折叠,以保证封口的牢固性。并且,封口支撑板40和折叠杆42的移动均可通过封口臂41进行控制,节省了用于控制封口支撑板40的驱动件,本技术的结构简单,成本低。
91.如图8所示,在本实施例中,第三驱动件43优选用第二电机,第二电机固定安装在封口臂41上方;第二电机通过第一牵引绳431连接至封口臂41的前部。为保证第二电机有足够的安装空间,本实施例将第二电机固定在壳体10的后部。
92.如图8和图9所示,本技术的封口臂41与壳体10通过两个铰接结构连接,第一铰接结构由设置在封口臂41上的第一铰接柱411和设置在壳体10上用于穿设第一铰接柱411的第一铰接孔12构成;第二铰接结构由设置在壳体10上的第二铰接柱13和设置在封口臂41上的用于穿设第二铰接柱13的第二铰接孔412构成。第一铰接孔12和第二铰接孔412均为条形孔,第一铰接孔12包括位于前方的转动限位部121和位于后方的移动限位部122;转动限位部121用于限制封口臂41带动折叠杆42靠近所述封口支撑板40,移动限位部122和第二铰接孔412用于限制封口臂41带动折叠杆42和封口支撑板40后移。
93.参见图11,本实施例的第一铰接柱411设于封口臂41的后端,第二铰接孔412开设在封口臂41上,且位于第一铰接柱411和折叠杆42之间;相应的,壳体10对应第一铰接柱 411的部分开设第一铰接孔12,壳体10对应第二铰接孔412设有第二铰接柱13。需要说明的是,一些实施例可将第一铰接柱411设置在壳体10上,并将第一铰接孔12开设在封口臂 41上。一些实施例可将第二铰接柱13设置在封口臂41上,并将第二铰接孔412开设在壳体 10上。
94.具体的,第三复位件优选为连接壳体10与封口臂41前部的拉力弹簧,第三复位件用于拉动封口臂41的前端远离封口支撑板40;第四复位件优选为安装在第一铰接柱411与第二铰接柱13之间的推力弹簧,第四复位件通过推动第一铰接柱411和第二铰接柱13相互远离,使封口臂41相对壳体10前移。
95.在第一次封口的过程中,第二电机第一次收紧第一牵引绳431,第一牵引绳431拉动封口臂41的前部,使封口臂41的前端以第二铰接柱13为原点,朝靠近封口支撑板40的方向转动。此时封口臂41上的第一铰接柱411在第一铰接孔12的转动限位部121中移动,防止封口臂41沿前后方向移动。在第二次封口的过程中,第二电机第二次收紧第一牵引绳431,第一牵引绳431继续拉动封口臂41的前部,使封口臂41上第一铰接柱411在第一铰接孔12 的移动限位部122中移动,同时,封口臂41上的第二铰接孔412能够避免封口臂41与第二铰接柱13发生干涉,使封口臂41向后移动。
96.本技术仅利用第二电机提供动力,即可控制封口臂41单独实现转动和移动两个动作,其结构简单,使用的零部件少,重量较轻。
97.在本实施例中,第四驱动件44优选用推拉式电磁铁,第四驱动件44依次通过第二牵引绳441和转动块442与折叠杆42的转动安装部连接。具体的,第四驱动件44安装在封口臂 41的后端,第二牵引绳441经过封口臂41的内部连接至转动块442,转动块442与折叠杆 42固定连接。为保证转动块442能够带动折叠杆42的折叠部翻转足够的角度,第二牵引绳 441绕过牵引块前方的绕线柱后,再连接至牵引块。
98.在折叠杆42向后翻转的过程中,第四驱动件44收紧第二牵引绳441,第二牵引绳441 拉动转动块442向后翻转,从而使折叠杆42的转动安装部跟随转动块442一起转动,以保证折叠杆42的折叠部实现向后翻转的动作。
99.在一些实施例中,第四驱动件44也可以为常见的电机,利用电机直接与折叠杆42连接,以控制折叠杆42的折叠部实现翻转的动作。
100.需要说明的是,本实施例的封口机构可选择与本技术中的取张袋机构30配合使用,也可以选择与现有套袋装置的取张袋机构配合使用。
101.如图10所示,本技术的套袋装置还包括限位锁紧机构,限位锁紧机构用于锁紧后移的封口支撑板40。在本实施例中,限位锁紧机构包括安装在封口支撑板40后方的锁紧块50以及设于锁紧块50与壳体10之间的第六复位件。锁紧块50铰接在壳体10上,第六复位件用于控制锁紧块50的前端伸入到封口支撑板40上开设的锁紧口402中,以防止封口支撑板40在第二次封口过程中前后移动,从而保证封口过程的稳定性。
102.在本实施例中,限位锁紧机构还包括安装在锁紧块50后方的解锁块51以及设于锁紧块50与壳体10之间的第七复位件。解锁块51铰接在壳体10上,第七复位件用于控制解锁块 51的后端延伸到取张袋支架31与储袋机构之间。在取张袋支架31朝向储袋机构移动时,
取张袋支架31驱动解锁块51转动,使解锁块51带动锁紧块50克服第六复位件的作用,将封口支撑板40解锁。在本实施例中,第六复位件和第七复位件优选用常见的扭力弹簧,也可以选用常规的推力弹簧或拉力弹簧。
103.如图10和图13所示,本实施例中的解锁块51通过安装在其后端的第三牵引绳501连接至锁紧块50的后端。在第二次封口过程中,当封口臂41向后移动到指定位置后,锁紧块50 能够在第六复位件的作用下伸入到锁紧口402中,以保证封口支撑板40能够稳定支撑起育果袋的第一面。
104.当完成第二次封口操作后,取张袋机构30会再次执行取袋操作,取张袋支架31朝向储袋机构移动,并拨动解锁块51的后端,使解锁块51通过第三牵引绳501带动解锁块51联动,控制锁紧块50退出封口支撑板40上的锁紧口402,从而使封口支撑板40解锁。
105.以上所述仅是本技术的较佳实施方式而已,并非对本技术做任何形式上的限制,虽然本技术已以较佳实施方式揭露如上,然而并非用以限定本技术,任何熟悉本专业的技术人员,在不脱离本技术技术方案的范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施方式,但凡是未脱离本技术技术方案的内容,依据本技术的技术实质对以上实施方式所作的任何简单修改、等同变化与修饰,均仍属于本技术技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。