1.本发明涉及量子精密测量技术领域,具体涉及一种用于三轴矢量原子磁强计中三维线圈的原位标定方法,有助于提高三轴矢量原子磁强计中三维线圈的标定精度,降低三轴矢量原子磁强计的磁场耦合与系统误差,对发展新一代超高灵敏度三轴磁场测量及其应用有着重要的意义,未来可服务于量子导航、计量测试、深空/深地磁探测、生物极弱磁探测等领域。
背景技术:
2.矢量原子磁强计可显著提高磁场测量极限,例如其中基于无自旋交换弛豫原理的原子磁强计已成为目前测量灵敏度最高的磁强计(理论灵敏度可达at/hz
1/2
量级)。矢量原子磁强计中三轴矢量原子磁强计能够同时提供磁场三轴矢量的方向与幅度信息,可应用于量子导航、计量测试、深空/深地磁探测、生物极弱磁探测等领域,已成为新一代磁强计的发展方向。三轴矢量磁强计中三维线圈用于磁场补偿与调制、标定磁强计技术指标,三维线圈的标定误差与精度直接影响三轴矢量原子磁强计的工作性能。然而由于生产及安装工艺的限制,实际应用的三维线圈存在非正交误差、线圈系数误差与零偏磁场误差参数,导致三轴矢量原子磁强计产生磁场耦合与系统误差,因此需要实现三轴矢量原子磁强计中三维线圈的高精度标定。
3.现有适用于三轴原子磁强计中三维线圈的标定方法,对误差来源考虑不充分,单一考虑线圈常数误差或非正交误差,同时采用最小二乘法原理求解标定误差较大、精度较差。针对线圈常数标定,主要利用商用磁通门磁强计置于线圈中心,进行非原位测量,标定精度低,且该方法不适用于小型磁强计的小型三维线圈。而对于小型三维线圈,往往直接采用线圈仿真设计值作为线圈常数,误差较大。针对线圈非正交角标定,现有研究主要实现了非正交角度的测量,并未实现补偿进行误差校正。因此,开展三轴矢量原子磁强计中三维线圈的原位标定方法研究十分必要,这将促进超高灵敏矢量原子磁强计的探索,为未来三轴矢量原子磁强计的应用奠定重要基础。
技术实现要素:
4.本发明针对现有技术中的不足,提供一种用于三轴矢量原子磁强计中三维线圈的原位标定方法,有助于降低三轴矢量原子磁强计的磁场耦合与系统误差,对发展新一代超高灵敏度三轴磁场测量及其应用有着重要的意义和价值,未来将服务于各个领域特别是量子导航、计量测试、深空/深地磁探测、生物极弱磁探测等方面。
5.本发明的技术解决方案如下:
6.一种用于三轴矢量原子磁强计中三维线圈的原位标定方法,其特征在于,包括:利用三轴矢量原子磁强计中三维线圈产生n组不同的标定磁场,n≥4的整数,分别利用三轴矢量原子磁强计敏感核心高灵敏测量三维线圈产生的标定磁场的三轴矢量分量,利用粒子群算法对三轴矢量原子磁强计测量结果进行数据最优化求解得到12个三维线圈误差参数,实
现三维线圈非正交误差、线圈系数误差、零偏磁场误差参数的测量与校正,完成三维线圈的标定。
7.包括以下步骤:
8.步骤1,对三轴矢量原子磁强计中磁屏蔽装置消磁,并使磁屏蔽装置中心处剩磁补偿至小于100pt;
9.步骤2,使三轴矢量原子磁强计正常工作,将三轴矢量原子磁强计敏感核心的y测量方向与三维线圈的y轴线圈产生的均匀磁场方向对准;
10.步骤3,利用信号发生器产生三路控制电流,分别驱动三维线圈中x、y、z三个方向的单轴均匀场线圈,共同产生一组标定磁场b
coil
;
11.步骤4,利用三轴矢量原子磁强计敏感核心高灵敏度测量三维线圈产生的标定磁场b
coil
,将测量结果b传输至计算机,返回步骤3,重复n次,n为正整数;
12.步骤5,利用计算机基于粒子群算法优化求解得到三维线圈的12个误差参数:cosη
xx
,cosη
xy
,cosη
xz
,cosη
zx
,cosη
zy
,cosη
zz
,k
x
,ky,kz,b
x0
,b
y0
,b
z0
,其中η
xx
是x轴线圈与x测量方向的夹角,η
xy
是x轴线圈与y测量方向的夹角,η
xz
是x轴线圈与z测量方向的夹角,η
zx
是z轴线圈与x测量方向的夹角,η
zy
是z轴线圈与y测量方向的夹角,η
zz
是z轴线圈与z测量方向的夹角,k
x
是x轴线圈的线圈常数误差系数,ky是y轴线圈的线圈常数误差系数,kz是z轴线圈的线圈常数误差系数,bx0是x测量方向的零偏磁场误差,by0是y测量方向的零偏磁场误差,bz0是z测量方向的零偏磁场误差;
13.步骤6,利用误差参数得到校正后的标定方程,并利用计算机将校正结果反馈至信号发生器,驱动三维线圈产生校准磁场b
ccoil
,完成三维线圈的标定。
14.标定磁场b
coil
=(b
coilx
,b
coily
,b
coilz
),其中b
coilx
,b
coily
,b
coilz
为三维线圈中x、y、z三个方向的单轴均匀场线圈产生磁场的幅度有效值;三轴矢量原子磁强计测量的矢量磁场b=(b
x
,by,bz),其中b
x
,by,bz为在x、y、z三个测量方向的磁场幅度有效值;三轴矢量原子磁强计对三维线圈产生的标定磁场b
coil
的测量结果b表达式为:
15.b=rb
coil
b016.其中转换矩阵diag()表示对角矩阵,零偏磁场b0=(bx0,by0,bz0),当且仅当b
coilbcoil t
为非奇异矩阵时,r有唯一解:
[0017][0018]
其中t为矩阵转置运算符。
[0019]
为求解三维线圈的最优误差参数,建立残差r方程:
[0020]
r=||b-(rb
coil
b0)||
[0021]
构建代价方程:
[0022][0023]
等式左边表示求f(r,b0)取最小值时(r,b0)的取值,其中m=1,2,
…
,n为三轴矢量原子磁强计测量次数,为保证求解要求,n≥4的整数,利用计算机基于粒子群算法求解三维
线圈误差参数的最优解(r,b0)的解值使代价方程得到最小值,此时,实现三轴矢量原子磁强计中三维线圈的12个误差参数(cosη
xx
,cosη
xy
,cosη
xz
,cosη
zx
,cosη
zy
,cosη
zz
,k
x
,ky,kz,b
x0
,b
y0
,b
z0
)的测量。
[0024]
计算所述三维线圈在x、y、z三个方向的非正交角,包括:
[0025]
x轴线圈与y轴线圈的夹角β
xy
=η
xy
,z轴线圈与y轴线圈的夹角β
yz
=η
zy
,x轴线圈与z轴线圈的夹角β
xz
:
[0026][0027]
利用转换矩阵和零偏磁场的最优解值构建所述三维线圈的标定方程:构建所述三维线圈的标定方程:
[0028]
其中,bc为三轴矢量原子磁强计所需要的理想磁场,为校正后的三维线圈对应产生的磁场,计算机将校正结果传输至所述信号发生器,驱动三维线圈产生校准磁场至此,完成三维线圈的标定。
[0029]
所述三维线圈为三组沿x、y、z三个方向布置的单轴均匀场线圈构成,受生产技术与安装工艺影响,三维线圈的x、y、z三个方向存在非正交角,包括x轴线圈与y轴线圈的夹角β
xy
,z轴线圈与y轴线圈的夹角β
yz
,以及x轴线圈与z轴线圈的夹角β
xz
,非正交角的存在导致三维线圈的单轴均匀场线圈产生的x、y、z三个磁场方向与三轴矢量原子磁强计的x、y、z三个正交测量方向不严格一一对准,需要进行标定。
[0030]
所述三维线圈位于磁屏蔽装置内,所述三轴矢量原子磁强计敏感核心位于所述三维线圈的中心,所述三维线圈中的x轴均匀场线圈、y轴均匀场线圈和z轴均匀场线圈分别连接信号发生器,所述信号发生器通过计算机连接所述三轴矢量原子磁强计敏感核心,所述信号发生器分别对三维线圈x,y,z三个方向线圈产生三路控制电流,所述三路控制电流使所述三维线圈分别产生x,y,z三个方向均匀磁场。
[0031]
所述三轴矢量原子磁强计敏感核心高灵敏优于1pt/hz
1/2
。
[0032]
对三轴矢量原子磁强计中磁屏蔽装置需进行消磁处理,保证中心处剩磁≤2nt。
[0033]
本发明的技术效果如下:本发明一种用于三轴矢量原子磁强计中三维线圈的原位标定方法,可以实现三轴原子磁强计中三维线圈的原位标定,校正三维线圈的线圈常数误差、非正交误差以及零偏磁场误差,提高三维线圈的标定精度,有助于降低三轴矢量原子磁强计的系统误差。
[0034]
本发明与现有技术相比的优点在于:(1)本方法可以测量并校正三轴矢量原子磁强计中三维线圈由于生产水平和安装工艺而产生的非正交误差、线圈常数误差以及零偏磁场误差,从而提高三维线圈标定精度,降低三轴矢量原子磁强计的磁场耦合与系统误差。在现有三轴矢量原子磁强计的三维线圈的应用中,暂无成熟的对三维线圈的多来源误差测量及补偿的标定方法。(2)本方法测量过程所需的全部器部件均为三轴矢量原子磁强计自身的器部件,不需要额外增加器部件,可实现三维线圈的原位标定,利于小型化应用。
附图说明
[0035]
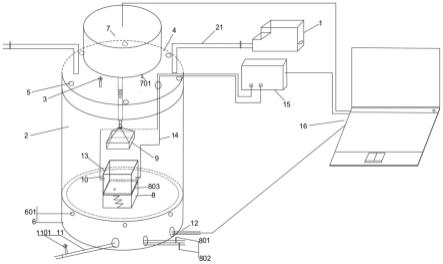
图1是实施本发明一种用于三轴矢量原子磁强计中三维线圈的原位标定方法涉及的装置结构示意图。
[0036]
图2为三轴矢量原子磁强计的测量方向与三维线圈的磁场方向示意图。
[0037]
图3为本发明一种用于三轴矢量原子磁强计中三维线圈的原位标定方法流程图。图3中内容包括:步骤1,对磁屏蔽装置消磁,并使磁屏蔽装置中心处剩磁补偿至小于100pt;步骤2,使三轴矢量原子磁强计正常工作,将三轴矢量原子磁强计敏感核心的y测量方向与三维线圈的y轴线圈产生的均匀磁场方向对准;步骤3,利用信号发生器产生三路控制电流,分别驱动三维线圈中x、y、z三个方向的单轴均匀场线圈,共同产生一组标定磁场b
coil
;步骤4,利用三轴矢量原子磁强计敏感核心高灵敏度测量三维线圈产生的标定磁场b
coil
,将测量结果b传输至计算机,返回步骤3,重复n次,n为正整数;步骤5,利用计算机基于粒子群算法优化求解得到三维线圈的12个误差参数,cosη
xx
,cosη
xy
,cosη
xz
,cosη
zx
,cosη
zy
,cosη
zz
,k
x
,ky,kz,b
x0
,b
y0
,b
z0
,其中η
xx
是x轴线圈与x测量方向的夹角,η
xy
是x轴线圈与y测量方向的夹角,η
xz
是x轴线圈与z测量方向的夹角,η
zx
是z轴线圈与x测量方向的夹角,η
zy
是z轴线圈与y测量方向的夹角,η
zz
是z轴线圈与z测量方向的夹角,k
x
是x轴线圈的线圈常数误差系数,ky是y轴线圈的线圈常数误差系数,kz是z轴线圈的线圈常数误差系数,bx0是x测量方向的零偏磁场误差,by0是y测量方向的零偏磁场误差,bz0是z测量方向的零偏磁场误差;步骤6,利用误差参数得到校正后的标定方程,并利用计算机将校正结果反馈至信号发生器,驱动三维线圈产生校准磁场b
ccoil
,完成三维线圈的标定。
[0038]
附图标记列示如下:1-磁屏蔽装置;2-三维线圈(由三个单轴均匀场线圈组成,即x轴均匀场线圈,y轴均匀场线圈,和z轴均匀场线圈,分别产生x,y,z三个方向均匀磁场);3-三轴矢量原子磁强计敏感核心;4-信号发生器(分别对三维线圈x,y,z三个方向线圈产生三路控制电流);5-计算机;xyz-三轴矢量原子磁强计坐标轴或三轴矢量原子磁强计敏感核心坐标轴或测量方向坐标轴;xyz是三维线圈均匀磁场方向坐标轴;η
xx-x轴线圈与x测量方向的夹角;η
xy-x轴线圈与y测量方向的夹角;η
xz-x轴线圈与z测量方向的夹角;η
zx-z轴线圈与x测量方向的夹角;η
zy-z轴线圈与y测量方向的夹角;η
zz-z轴线圈与z测量方向的夹角。
具体实施方式
[0039]
下面结合附图(图1-图3)和实施例对本发明进行说明。
[0040]
图1是实施本发明一种用于三轴矢量原子磁强计中三维线圈的原位标定方法涉及的装置结构示意图。图2为三轴矢量原子磁强计的测量方向与三维线圈的磁场方向示意图。图3为本发明一种用于三轴矢量原子磁强计中三维线圈的原位标定方法流程图。参考图1至图3所示,一种用于三轴矢量原子磁强计中三维线圈的原位标定方法,有助于提高三轴矢量原子磁强计中三维线圈的标定精度,降低三轴矢量原子磁强计的磁场耦合与系统误差,对发展新一代超高灵敏度三轴磁场测量及其应用有着重要的意义和价值,未来将服务于各个领域特别是惯性测量、物理基础研究、地质勘探、军事国防、生物医疗等方面包括以下步骤,利用三轴矢量原子磁强计中三维线圈产生n组不同的标定磁场,n≥4的整数,分别利用三轴矢量原子磁强计敏感核心高灵敏测量三维线圈产生的标定磁场的三轴矢量分量,利用粒子群算法对三轴矢量原子磁强计测量结果进行数据最优化求解得到12个三维线圈误差参数,
实现三维线圈非正交误差、线圈系数误差、零偏磁场误差参数的测量与校正,完成三维线圈的标定。
[0041]
所述三维线圈和所述三轴矢量原子磁强计敏感核心均为所述三轴矢量原子磁强计器部件,三轴矢量原子磁强计敏感核心位于三维线圈中心,三维线圈位于磁屏蔽装置中心。所述磁屏蔽装置需进行消磁处理,保证中心处剩磁≤2nt。所述三轴矢量原子磁强计敏感核心可实现在其所在位置高灵敏度(优于1pt/hz
1/2
)测量三轴磁场的矢量测量,获得在x、y、z三个正交测量方向的磁场分量信息。
[0042]
所述三维线圈为三组沿x、y、z三个方向布置的单轴均匀场线圈构成,受生产技术与安装工艺影响,三维线圈的x、y、z三个方向存在非正交角,包括x轴线圈与y轴线圈的夹角β
xy
,z轴线圈与y轴线圈的夹角β
yz
,以及x轴线圈与z轴线圈的夹角β
xz
。非正交角的存在导致三维线圈的单轴均匀场线圈产生的x、y、z三个磁场方向与三轴矢量原子磁强计的x、y、z三个正交测量方向不严格一一对准,需要进行标定。所述三轴矢量原子磁强计的y测量方向与所述三维线圈中y轴线圈产生的均匀磁场方向对准。
[0043]
如图1,一种用于三轴矢量原子磁强计中三维线圈的原位标定装置包括磁屏蔽装置1、三维线圈2、三轴矢量原子磁强计敏感核心3、信号发生器4、计算机5。其中,三维线圈2、三轴矢量原子磁强计敏感核心3均属于三轴矢量原子磁强计器部件,均处于在磁屏蔽装置1的内部,三轴矢量原子磁强计敏感核心3位于三维线圈2中心,三维线圈2位于磁屏蔽装置1中心,磁屏蔽装置1用于为三轴矢量原子磁强计敏感核心3提供三轴矢量原子磁强计工作所需的弱磁场环境,磁屏蔽装置1经过消磁后可以显著减少外界磁场如地磁场对三轴矢量原子磁强计工作性能的影响,信号发生器4用于产生三路控制电流使三维线圈2分别在x,y,z三个方向施加不同的三个均匀磁场,用于进一步补偿磁屏蔽装置1内的剩余磁场及产生标定磁场,三轴矢量原子磁强计敏感核心3用于高灵敏测量三维线圈2产生的标定磁场在x,y,z三个正交测量方向的磁场分量,计算机5读取并处理磁场分量信息,基于粒子群算法求解三维线圈的12个误差参数并进行误差校正,将校正后的线圈参数反馈给信号发生器4,产生标定后的三维均匀磁场。本装置利用三轴矢量原子磁强计高灵敏测量自身的三维线圈器件产生的三轴磁场矢量分量,利用粒子群算法对输出结果进行数据最优化求解得到12个误差参数实现测量与校正,完成三维线圈的标定。
[0044]
图2为本发明三轴矢量原子磁强计的测量方向与三维线圈的磁场方向示意图。在三轴矢量原子磁强计中,y轴线圈与三轴矢量原子磁强计中的y测量方向对准,三轴矢量原子磁强计的测量方向与三维线圈的磁场方向偏差角度具体有:
①
x轴线圈与x测量方向的夹角η
xx
;
②
x轴线圈与y测量方向的夹角η
xy
;
③
x轴线圈与z测量方向的夹角η
xz
;
④
z轴线圈与x测量方向的夹角η
zx
;
⑤
z轴线圈与y测量方向的夹角η
zy
;
⑥
z轴线圈与z测量方向的夹角η
zz
。
[0045]
如图3,一种用于三轴矢量原子磁强计中三维线圈的原位标定方法,包括以下步骤:
[0046]
(1)对磁屏蔽装置1消磁,并使磁屏蔽装置1中心处剩磁小于100pt。
[0047]
(2)使三轴矢量原子磁强计正常工作,将三轴矢量原子磁强计敏感核心3的y测量方向与三维线圈2的y轴线圈产生的均匀磁场方向对准。
[0048]
(3)利用信号发生器4产生三路控制电流,分别驱动三维线圈2中x、y、z三个方向的单轴均匀场线圈产生幅度有效值为b
coilx
,b
coily
,b
coilz
的磁场,共同产生一组标定磁场b
coil
=(b
coilx
,b
coily
,b
coilz
)。
[0049]
(4)利用三轴矢量原子磁强计敏感核心3高灵敏度测量三维线圈2产生的标定磁场b
coil
,三轴矢量原子磁强计测量的矢量磁场b=(b
x
,by,bz),在x、y、z三个测量方向的磁场幅度有效值分别为b
x
,by,bz。将测量结果b传输至计算机5,返回步骤4,重复n次,n≥4的整数;。
[0050]
(5)三轴矢量原子磁强计对三维线圈2产生的标定磁场b
coil
的测量结果b表达式为:
[0051][0052]
即b=rb
coil
b0,
[0053]
其中转换矩阵diag()表示对角矩阵,零偏磁场b0=(bx0,by0,bz0)。当且仅当b
coilbcoil t
(
t
表示矩阵的转置)为非奇异矩阵时,r有唯一解:
[0054][0055]
为求解三维线圈2最优误差参数,建立残差r方程:
[0056]
r=||b-(rb
coil
b0)||,
[0057]
从而构建代价方程:
[0058][0059]
等式左边表示求f(r,b0)取最小值时(r,b0)的取值,其中m=1,2,
…
,n为三轴矢量原子磁强计测量次数。为提高标定精度,测量次数应越多越好,且每次三维线圈2产生的标定磁场b
coil
应不同。为保证求解要求,n≥4的整数。利用所述计算机5基于粒子群算法优化求解代价方程得到转换矩阵r和零偏磁场b0的最优解(r,b0)的解值可以获得三维线圈2的12个误差参数(cosη
xx
,cosη
xy
,cosη
xz
,cosη
zx
,cosη
zy
,cosη
zz
,k
x
,ky,kz,b
x0
,b
y0
,b
z0
)。从而也可计算所述三维线圈2在x、y、z三个方向的非正交角,包括:
[0060]
x轴线圈与y轴线圈的夹角
[0061]
β
xy
=η
xy
,
[0062]
z轴线圈与y轴线圈的夹角
[0063]
β
yz
=η
zy
,
[0064]
x轴线圈与z轴线圈的夹角
[0065][0066]
(6)进一步校正三维线圈2的误差参数,利用转换矩阵r和零偏磁场b0的最优解值构建三维线圈2的标定方程:
[0067]
[0068]
其中,bc为三轴矢量原子磁强计所需要的理想磁场,为校正后的三维线圈2对应产生的磁场。计算机将校正结果传输至所述信号发生器4,驱动三位线圈2产生校准磁场至此,完成三维线圈2的标定。
[0069]
本发明说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。在此指明,以上叙述有助于本领域技术人员理解本发明创造,但并非限制本发明创造的保护范围。任何没有脱离本发明创造实质内容的对以上叙述的等同替换、修饰改进和/或删繁从简而进行的实施,均落入本发明创造的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。