1.本实用新型涉及水产养殖技术领域,特别是一种自动化工业水产养殖喂料机。
背景技术:
2.梭子蟹、青蟹等蟹类产品养殖目前多数采用土塘养殖模式,有的采用水泥池等养殖方式,由不同养殖盒或其它类型放置通过组装方式组成层层叠加的养殖单元的工厂化养殖模式开始兴起,目前主要为人工喂料模式。
3.但是,人工喂料时,不同蟹喂料多少不易控制,喂料多,剩料会造成水质污染和浪费,喂料少,蟹的生长受到影响,并且劳动强度大,占用时间长,浪费劳动力,人工成本高不利于大批量的工业化养殖。
技术实现要素:
4.本实用新型所要解决的技术问题是针对现有技术的不足,提供一种自动化程度高、省时省力、有利于实现大规模批量化工业化养殖的自动化工业水产养殖喂料机。
5.本实用新型所要解决的技术问题是通过以下的技术方案来实现的。本实用新型是一种自动化工业水产养殖喂料机,包括机架,在机架的底部固定安装有行走机构,在机架上安装有上下设置的上料仓和下料仓,在上料仓与下料仓之间安装有升料器;
6.在上料仓的下方安装有分料盘,在机架上安装有用于驱动上料仓移动与分料盘配合的分料动力机构,在上料仓的底部设置有开口,在分料盘上设置有若干与开口配合的配料孔,在分配盘上安装有配料杆和驱动配料杆转动的配料动力机构,配料杆设置在配料孔内;
7.在配料孔的侧部设置有带出料孔的分配板和用于驱动分配板移动的分配动力机构,在分配板处的分料盘上还设置有与出料孔配合的落料腔,在落料腔的底部连通有与外部养殖单元配合的落料管。
8.本实用新型所要解决的技术问题还可以通过以下的技术方案来进一步实现,对于以上所述的自动化工业水产养殖喂料机,所述行走机构包括主动轮、从动轮和用于驱动主动轮转动的步进电机。
9.本实用新型所要解决的技术问题还可以通过以下的技术方案来进一步实现,对于以上所述的自动化工业水产养殖喂料机,所述升料器包括竖向设置的套管、设置在套管内的螺杆和用于驱动螺杆转动的升料电机,在套管的顶部设置有与上料仓配合的排料口。
10.本实用新型所要解决的技术问题还可以通过以下的技术方案来进一步实现,对于以上所述的自动化工业水产养殖喂料机,所述分料盘呈圆盘状,分料动力机构为分料电机,上料仓上固定安装有主轴,分料电机的输出轴通过同步带与主轴传动连接。
11.本实用新型所要解决的技术问题还可以通过以下的技术方案来进一步实现,对于以上所述的自动化工业水产养殖喂料机,所述分料盘呈矩形状,分料动力机构为分料电机,在机架上设置有与上料仓配合的导轨和同步带,同步带与分料电机的输出轴传动连接。
12.本实用新型所要解决的技术问题还可以通过以下的技术方案来进一步实现,对于以上所述的自动化工业水产养殖喂料机,所述配料动力机构包括配料电机,配料电机的输出轴通过摇臂、连杆与配料杆连接。
13.本实用新型所要解决的技术问题还可以通过以下的技术方案来进一步实现,对于以上所述的自动化工业水产养殖喂料机,所述配料动力机构包括配料电机,配料电机通过摇臂、拉线与配料杆连接,在配料孔内还安装有与配料杆配合的弹簧。
14.本实用新型所要解决的技术问题还可以通过以下的技术方案来进一步实现,对于以上所述的自动化工业水产养殖喂料机,在机架上还安装有与落料管配合的落料调整机构,落料调整机构包括通过滑块、滑板配合安装在机架上的调整杆和用于驱动调整杆横向移动的调整电机,在调整杆上固定安装有齿条,在调整电机的输出轴上安装有与齿条啮合的齿轮。
15.本实用新型所要解决的技术问题还可以通过以下的技术方案来进一步实现,对于以上所述的自动化工业水产养殖喂料机,所述分配动力机构包括分配板电机,分配板电机通过摇臂与分配板连接。
16.本实用新型所要解决的技术问题还可以通过以下的技术方案来进一步实现,对于以上所述的自动化工业水产养殖喂料机,该养殖喂料机还包括用于总体控制的控制板,在机架上还安装有若干摄像头,在上料仓上还安装有用于物料检测的激光传感器。
17.与现有技术相比,本实用新型的有益效果:
18.1、采用控制板控制驱动步进电机转动实现前进和后退,可实现喂料机的自行走功能;
19.2、通过控制板控制摄像头可对养殖单元中的蟹进行拍照和录像,可对养殖单元拍照后进行识别养殖单元中蟹的大小、性别、养殖时间等各种信息,并根据相关信息发送信号给配料电机其驱动配料杆在配料孔内移动到合适的位置形成合适的配料腔配料空间,为各养殖单元配适量的料,从而降低多余饵料对水质的破坏,从而降低饵料成本和水处理能耗;
20.3、本技术还设置有落料调整装置,能够保证颗粒料都可落入到对应的养殖单元中;
21.4、本技术可根据蟹的大小、种类、养殖阶段进行合适配料,实现自动化喂养,照片和视频可通过服务器读取,进行养殖单元内蟹生活状况的监控,降低了人工喂料的成本,避免了人工喂料将病菌带入养殖车间和养殖单元内的风险,可实现大规模批量化工厂化养殖。
附图说明
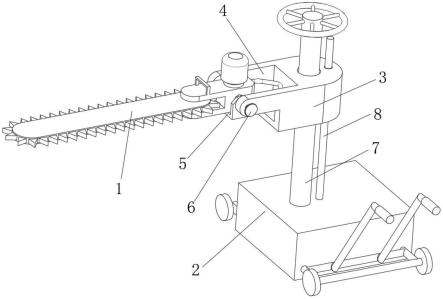
22.图1为本实用新型的一种结构示意图;
23.图2为本实用新型的结构侧视图;
24.图3为本实用新型升料器的结构示意图;
25.图4为本实用新型分料盘呈圆形的结构示意图,其中a为主视图,b为俯视图,c为侧视图,d为a局部放大图,e为f局部放大图;
26.图5为本实用新型分料盘呈矩形的结构示意图,其中a为主视图,b为俯视图,c为侧视图。
27.图6为本实用新型配料杆的驱动示意图一,其中a为b局部放大图, b、c、d、e为其a-a剖视图;
28.图7为本实用新型配料杆的驱动示意图二,其中b局部放大图,b、c、d、e为b-b剖视图;
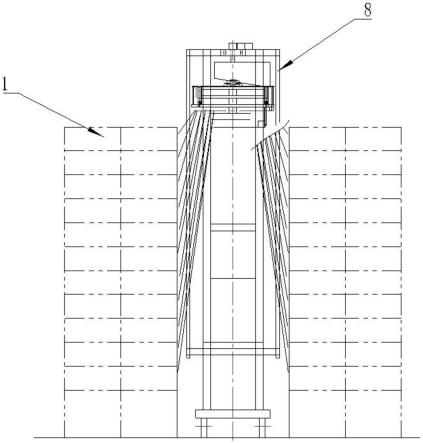
29.图8为本实用新型落料调整机构的结构示意图,其中c和e分别为调整杆上端的侧视和正视局部放大连接示意图。
具体实施方式
30.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
31.参照图1至图8,一种自动化工业水产养殖喂料机,由步进驱动系统、机架2、升料器、识别系统、分料装置及落料和调整装置构成,喂料机采用自行走装置,机架2上安装有电池柜13,用于安装电池,提供电源,能够根据养殖单元内蟹的种类、大小及养殖时间计算所需的饵料重量,并采用分料装置将饵料分配到对应的养殖单元1中,实现自动化喂料,解决了目前有的产品中采用人工喂料中存在的喂料时间长,喂料多少不好控制(多余料造成水质污染,量少影响生长),人工喂养成本高的问题;
32.步进驱动系统由控制板43发送信号,使摄像头10对养殖单元1进行拍照并识别养殖单元1号码,计算位置,根据位置计算到下一列养殖单元(距离),发送信号驱动步进电机14带动主动轮15转动使机器前进或后退;
33.升料器由控制板43根据激光传感器50判断上料仓6中是否有料,当无料时发送信号升料电机12转动,驱动螺杆19在套管18内转动,带动颗粒料上升到上部,从排料口17排出到上料仓6中,根据参数转定一定圈数后停止,并根据激光传感器50判断上料仓6中料的多少,当仍无料时,发送信号给服务器通知缺料,并自动行走到料仓处进行补料;
34.喂料机前进到对应的养殖单元1的位置时,控制板43发送信号使摄像头10对对应的一列养殖单元1进行拍照判断是否有蟹,蟹的大小、种类,喂养时间等状态。或读取服务器信息中对应的养殖单元中的相关信息,根据相关信息,计算是否需要喂料,料的多少,根据料的多少,发送信号给对应层的配料电机24,配料电机24通过配料电机固定板25进行安装固定,使配料电机24转动一定方向和圈数,驱动配料杆21在配料孔22内上下运动,在配料孔22处安装有配合进料的内隔块31和外隔块29,配料杆21有两种驱动方式:
35.驱动方式一:配料电机24转动,带动摇臂38正传或反转一定角度,摇臂38带动连杆37从而带动配料杆21上下运动如图4中的连杆机构,图6中a为局部放大图,b为配料杆21为中间状态时,c为配料杆21在最上端时,d为配料杆21在最下端时;
36.驱动方式二:配料电机24转动,带动摇臂38正传或反转一定角度,摇臂38带动拉线41从而带动配料杆21上下运动如图5中的弹簧机构,图7中a为局部放大图,b为配料杆21为中间状态时,c为配料杆21在最上端时,d为配料杆21在最下端时,弹簧40使配料杆21始终有一个向上的力以保持向上运动趋势;
37.分料装置有两种形式,分别是如图4中的圆盘形分料装置和如图5中的矩形分料装置,
38.如图4中的圆盘形分料装置,当对应各层养殖单元的配料电机24驱动对应的配料杆21到对应的位置时,各配料杆上端都有一斜面33,斜面33在配料孔22内与分料盘上表面20之间有一定的空间形成配料腔54,控制板43发送信号给分料电机3,分料电机3通过同步带4带动主轴5转动一圈,上料仓6固定在主轴5上,从而跟着转动一圈;上料仓6下部有开口,并且下平面紧贴分料盘上表面20,上料仓6转动过程中,仓内颗粒料从下部开口处沿分料盘上表面20滑动,并将各个配料腔54的空间填满,控制板43发送信号给分配板电机51,带动摇臂52旋转,从而带动圆筒状分配板30绕中心转动一定角度,使分配板30上的出料孔34对准配料杆21和配料孔22,配料腔54内的颗粒料沿斜面33从出料孔34经落料腔35、落料孔28、管接头23、落料管36落到养殖单元1中,落料腔35内设置有便于颗粒输出的斜块27,出料孔34处安装有内围板32和外围板26,控制板43发送信号给分配板电机51,带动摇臂52、圆筒状分配板30反向旋转一定角度,使出料孔34与配料杆21、配料孔22错开,如图6中e所示,便于下一次分料;
39.如图5中的矩形分料装置所示,各配料杆21和配料孔22呈两列分布,上料仓6下部对应有两个开口给对应的配料孔22供料,控制板43发送信号给分料电机3,分料电机3通过同步带4带动与同步带4下面连接的上料仓6沿导轨53前后运动,将颗粒料分配给各个配料腔54,控制板43发送信号给分配板电机51,带动摇臂52转动,带动板状分配板30前后移动,使分配板30上的出料孔34对准配料杆21和配料孔22,配料腔54内的颗粒料沿斜面0从出料孔34经落料腔35、落料孔28、管接头23、落料管36落到养殖单元1中;
40.控制板43发送信号给分配板电机51,带动摇臂52、板状分配板30反向移动一定距离,使出料孔34与配料杆21、配料孔22错开,如图4中e所示,便于下一次分料;
41.如图8所示,在机架2两侧有调整杆8,调整杆8上安装有滑块48,机架2上安装有横梁49,横梁49上设置有与滑块48配合的滑板47,落料管36下端与调整杆8固定并成一定角度,以便颗粒料落下时能准确进入到养殖单元1中,由于安装原因,会造成喂料机两侧的养殖单元组合距离喂料机的距离会变大变小,同时底面的不平整可造成养殖单元组上下端侧面不在一个垂直线上,造成两侧养殖单元上下距离喂料机的实际距离会不同,实际喂料过程中,喂料机控制板43根据对应的养殖单元1的号读取数据库中对应的相关地形及距离数据,发送信号给调整电机46,调整电机46带动齿轮45转动,使齿条44左右移动,带动调整杆8上下端左右移动一定距离,使落料管下口正好对准养殖单元1的投料孔,避免颗粒料落到养殖单元1外。
42.各配料腔54内的颗粒料落入到对应的养殖单元1中后,控制板43发送信号给驱动步进电机14带动主动轮15转动,再加上从动轮16的配合,使喂料机移动到对应的下一列养殖单元的对应位置,进行下一列养殖单元的喂料工作。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。