1.本发明涉及档案管理装置,特别是涉及一种档案智慧存取装置。
背景技术:
2.档案管理中,档案的存放是主要的工作,对于一些可以封存的档案一般是独立装入一个档案盒,并对档案盒进行标识后放入集中存放中心放置。而对于一些需要随时更新的档案则需要根据分类分别放置在不同的档案盒内存放,并在需要新增、修改或删减时取出档案盒,然后进行更新,更新完成后重新放会档案柜。而在实际操作时,在寻找、取放相应档案盒的耗时一般会超过整体耗时的一半,而且由于不同的人负责不同的档案,因此在档案整理、取放时,有可能造成非整理档案盒的泄密,甚至损毁、丢失。
3.故申请人设计了一种档案智慧存取装置,其能够实现准确、快速地取放档案盒,一方面节约档案取放时间,另一方面也能防止非目标档案盒的误取出,造成损毁。
技术实现要素:
4.有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是提供一种档案智慧存取装置。
5.为实现上述目的,本发明提供了一种档案智慧存取装置,包括柜体、取放小车、夹爪机构,柜体内部安装有至少一个存放单元,且柜体上设置有取放口;存放单元包括存储壳,存储壳内部为中空的存储腔,存储腔内安装有多个盒夹,两个盒夹为一对,且每对盒夹分别安装在存储腔的上下两端面上;盒夹内侧为盒夹槽,每对盒夹的盒夹槽可分别与档案盒的上下两端卡合装配,从而使得档案盒阵列安装在存储腔内;取放小车包括取放壳,取放壳内部为取放腔,取放腔内安装有多对盒夹,两个盒夹为一对,且每对盒夹分别安装在取放腔的上下两端面上;每对盒夹的盒夹槽可分别与档案盒的上下两端卡合装配;夹爪机构包括两块夹板,两块夹板之间为夹板间隙,两块夹板之间通过相互靠近或相互移动以调节夹板间隙的宽度,从而使两块夹板夹紧档案盒或释放档案盒;取放小车与取放口定位、且存放单元与取放口定位后,取放上的每对盒夹分别与存放单元上的盒夹正对;此时通过夹爪机构的两块夹板夹紧储单元内的档案盒并送入取放小车对应的盒夹内即可完成档案盒的取出,或通过夹爪机构的两块夹板夹紧取放小车内的档案盒并送入储单元对应的盒夹内完成档案盒的装入。
6.作为本发明的进一步改进,所述盒夹的一端开口、另一端封闭,且盒夹的开口端处设置有止退槽,所述止退槽内安装有止退片,止退片具有弹性且一端与盒夹装配、另一端为开放端,开放端进入盒夹槽内从而遮挡档案盒,使得档案盒不会滑出盒夹槽。
7.作为本发明的进一步改进,所述取送小车还包括取放轮组件,所述取放轮组件包括取放电机,取放电机安装在取送壳上且其取放电机轴通过取放轮皮带与取放轮轴连接并构成带传动机构,所述取放轮轴可圆周转动地安装在取放轮架上,取放轮架安装在取送壳
上;所述取放轮架上还安装有取放轮。
8.作为本发明的进一步改进,还包括侧移机构,所述侧移机构包括安装在柜体上的侧移架,侧移架沿着取放口长度方向上安装且侧移架上安装有侧移皮带,侧移皮带绕过侧移皮带轴,侧移皮带轴一端装入柜体内且与侧移电机的输出轴连接;所述侧移皮带与侧移壳装配,侧移壳上安装有第一侧移壳板、两块第二侧移壳板,两块第二侧移壳板分别与拉升轴可圆周转动装配,第一侧移壳板、其中一块第二侧移壳板分别与对中螺杆可圆周转动且不可轴向移动装配;所述拉升轴上可轴向滑动、不可相对圆周转动地套装有两个升降卷轮,每个升降卷轮分别可圆周转动、不可轴向移动地安装在一个对中壳上,每个对中壳分别与一根对中齿条的一端装配,两根对中齿条分别与对中齿轮的两侧啮合传动,对中齿轮套装在对中齿轴上,对中齿轴安装在侧移壳上;其中一根对中齿条上安装有齿条螺纹座,所述齿条螺纹座套装在对中螺杆上且与之通过螺纹旋合装配;每个对中壳上分别安装有一个伸缩滑轨,伸缩滑轨远离对中壳的一端上安装有拉升梁、拉升座,所述拉升座安装在拉升梁上,且拉升座以拉索的一端装配,拉索的另一端与升降卷轮装配固定、收卷。
9.作为本发明的进一步改进,所述取放壳的两侧上分别安装有拉升件,所述拉升件包括对中板部分、拉升板部分;两根拉升梁可同步向对中板部分夹紧,直到达到相应的夹紧力;然后拉升梁上移后与拉升板部分压紧并通过拉升板部分带动整个取放小车上移;所述拉升轴的一端装入锁套内且与之可轴向滑动、不可相对圆周转动装配,所述拉升轴与侧移壳可圆周转动、不可轴向移动装配;所述锁套一端安装有第二锁轮、另一端穿出侧移壳后与第四摩擦轮装配,所述锁套可相对于侧移壳轴向滑动、圆周转动,与锁套装配的第二侧移壳板上安装有第一锁轮,所述第一锁轮可与第二锁轮压紧;所述侧移壳内还安装有第三侧移壳板,所述拉升轴位于第三侧移壳板、第二锁轮之间的部分上套装有上锁弹簧,上锁弹簧对第二锁轮施加向第一锁轮压紧的弹力,从而使得初始状态时,第一锁轮、第二锁轮相互压紧;对中螺杆的一端穿出侧移壳后与第三摩擦轮装配,所述第四摩擦轮、第三摩擦轮可分别与第二摩擦轮、第一摩擦轮压紧传动,所述第二摩擦轮、第一摩擦轮分别安装在拉升驱动轴、对中驱动轴上,所述拉升驱动轴、对中驱动轴分别可圆周转动地安装在外驱轴板上,外驱轴板安装在柜体上;且拉升驱动轴、对中驱动轴分别通过拉升电机、对中电机直接或间接驱动。
10.作为本发明的进一步改进,所述存放单元还包括安装在存放壳两端在安装座,所述安装座与导轮轴可圆周转动装配,所述导轮轴上分别套装有连接座、导轮;所述柜体包括两块侧柜板、面板,所述面板的两端分别与两块侧柜板的两侧装配,所述侧柜板内侧设置有导向槽,导向槽与导轮卡合装配且导轮可在导向槽内滚动、移动,所述侧柜板内侧还安装有引导框,所述引导框与存放壳的外壁贴合且可滑动装配;所述连接座与循环皮带装配,循环皮带分别绕过多根第二引导轴、第一引导轴、第三引导轴并构成带传动结构,所述循环皮带沿着导向槽安装;两块侧柜板上的第三引导轴分别通过第一传动带、第二传动带与循环联动轴连接并构成带传动机构,所述循环联动轴与两块侧柜板可圆周转动装配;其中一块侧柜板上的第二引导轴与循环电机的输出轴连接。
11.作为本发明的进一步改进,柜体内、与取放口对应处还安装有底座机构,所述底座
机构上安装有夹爪机构,底座机构包括底板,底板的两端分别与两块侧柜板装配;所述底板上分别安装有两个端架,底座机构上还安装有两个离合机构,每个离合机构包括分别安装在两个锻件上的离合组件,两个离合机构分别用于驱动第一传动轴、第二传动轴升降,从而控制第一传动轴、第二传动轴分别与第一主动轮、第二主动轮之间的传动或动力切断;所述离合组件包括电缸,电缸的外壳与端架铰接、电缸的电缸轴与扭转件铰接,扭转件安装在第一离合转轴上,第一离合转轴可圆周转动地安装在端架上,且第一离合转轴与凸轮的一端装配,凸轮的另一端通过第二离合转轴与离合杆的一端铰接,所述离合杆的另一端通过第三离合转轴与第一离合座铰接,所述第一离合座内部与第二离合座卡合且可滑动装配,所述第二离合座与离合导向轴的一端装配,离合导向轴的另一端套装离合弹簧后与第一离合座可轴向滑动装配,所述离合弹簧对第二离合座施加远离第一离合座的推力;所述第二离合座与第一传动轴或第二传动轴可圆周转动装配,且第二离合座上还安装有离合导板,所述离合导板可轴向滑动地套装在离合滑轴上,所述离合滑轴安装在离合滑轴板上,所述离合滑轴板安装在离合架上,离合架安装在端架上;第一传动轴的一端、第二传动轴的一端分别通过不同的万向节与第一传动电机的电机轴、第二传动电机的电机轴连接;所述底座机构上还安装有夹爪皮带,所述夹爪皮带通过夹爪输送电机驱动,夹爪输送电机安装在底座机构上,夹爪皮带与夹爪机构的夹爪架装配。
12.作为本发明的进一步改进,两个端架之间分别安装有第一导轨、第二导轨、传感器板,所述传感器板上安装有与存放单元上各个盒夹正对的光电传感器,所述夹爪机构上安装有感应片,当夹爪机构与某一盒夹正对时,感应片装入对应的光电传感器内,从而使得光电传感器向柜体工控机输送信号,此时判断为夹爪机构与对应的盒夹正对;所述第一导轨、第二导轨用于和安装在夹爪机构上的两个导轮座卡合且可滑动装配,从而对夹爪机构的移动提供引导。
13.作为本发明的进一步改进,所述夹爪机构还包括夹爪架,所述夹爪架上安装有导轮座、第一主动轮、第二主动轮,所述第一主动轮、第二主动轮分别安装在第一拉绳轴、第一伸展轴上,所述第一拉绳轴、第一伸展轴分别可圆周转动地安装在夹爪架上,且第一拉绳轴、第一伸展轴上还分别安装有第一拉绳齿、第一伸展齿,所述第一拉绳齿、第一伸展齿分别与第二拉绳齿、第二伸展齿啮合传动,所述第二拉绳齿、第二伸展齿分别安装在第二拉绳轴、第二伸展轴上,所述第二拉绳轴、第二伸展轴分别可圆周转动地安装在夹爪架上;第二伸展轴上安装在第三伸展齿,第三伸展齿与第四伸展齿啮合传动,第四伸展齿安装在伸展动力轴上,伸展动力轴可圆周转动地安装在夹爪架上且伸展动力轴上还设置有伸展蜗杆部分,伸展蜗杆部分与伸展蜗轮啮合传动,所述伸展蜗轮安装在伸展蜗轮轴上,伸展蜗轮轴安装在第一二号连杆上且伸展蜗轮轴与夹爪架可圆周转动装配;所述第二拉绳轴设置有拉绳蜗杆部分,拉绳蜗杆部分与拉绳蜗轮啮合传动,拉绳蜗轮安装在拉绳卷轮轴上,拉绳卷轮轴可圆周转动地安装在夹爪架上且拉绳卷轮轴上不可相对圆周转动地安装有拉绳卷轮,拉绳卷轮与拉绳的一端装配、收卷;所述第一二号连杆远离伸展蜗轮轴的一端上安装有第三轴体,所述第三轴体与连板可圆周转动装配且第三轴体上安装有第一联动齿,所述第一联动齿与第二联动齿啮合传动,第二联动齿安装在第四轴体上,所述第四轴体安装在第二一号连杆的一端上且第四轴
体与连板可圆周转动装配;所述连板还分别与第一一号连杆、第二二号连杆的一端铰接,所述第一一号连杆、第二二号连杆的另一端分别与夹爪架、连接架铰接,第二一号连杆远离连板一端与连板铰接;第一一号连杆、第二二号连杆分别与第一二号连杆、第二一号连杆平行;所述连接架上安装有夹座,所述夹座上分别设置有第一夹座板、第二夹座板、第三夹座板,所述第三夹座板的两端分别与第一夹座板、第二夹座板装配,同一块第三夹座板与两根第一夹杆的一端铰接,两根第一夹杆的另一端与两块不同的第一夹板块铰接,两块第一夹板块分别安装在两块夹板上;两块夹板上还分别设置有第二夹板块,两块第二夹板块分别与两根第二夹杆的一端铰接,两根第二夹杆的另一端分别与铰接块铰接,所述铰接块安装在光轴的一端上,光轴的另一端穿过第一夹座板且与之可轴向滑动装配,所述光轴位于铰接块、第一夹座板之间的部分上套装有弹簧环,所述光轴位于弹簧环、第一夹座板之间的部分上套装有夹板弹簧,所述夹板弹簧对光轴施加向第二夹座板推动的弹力。
14.作为本发明的进一步改进,所述光轴与拉绳的另一端装配,拉绳分别绕过第一引导轮、第二引导轮、两个第三引导轮后与拉绳卷轮装配;两个第三引导轮分别安装在连接架、夹爪架上,且其中一个第三引导轮的轴线与第一引导轮的轴线连线与第一一号连杆的长度线平行;另一第三引导轮的轴线与第二引导轮的轴线连线与第二一号连杆的长度线平行;所述第一引导轮、第二引导轮分别安装在第一轴体、第二轴体上,所述第一轴体、第二轴体分别安装在连板上。
15.本发明的有益效果是:本发明通过取放小车输送需要取放的档案盒,且利用举升机构实现档案柜与取放小车的自动定位、抬升,利用移送机构实现取放档案夹与存放档案夹之间的准确定位,从而可以实现目标档案盒的快速取放。而且档案柜的存放单元采用循环移动的方式,因此只需要确定取放小车与档案柜的定位即可实现对应取放单元与取放小车的定位,其结构简单、定位精度高、速度快,特别适用于档案盒需要频繁更新的应用场景。
附图说明
16.图1-图6是本发明的结构示意图,其中图1为取送小车600处于待提升状态,图4为取送小车600处于提升后的状态,图5为去除柜体110部分结构后的结构示意图。
17.图7是底座机构800、夹爪机构a、侧柜板110处结构示意图。
18.图8-图9是侧柜板110处结构示意图。
19.图10是存放单元300、夹爪机构a、底座机构800处结构示意图。
20.图11是取放小车600、侧移机构700、存放单元300、夹爪机构a、底座机构800处结构示意图。
21.图12-图16是夹爪机构a、底座机构800处结构示意图。
22.图17-图20是夹爪机构a的结构示意图。
23.图21-图22是夹板a140、夹座a150处结构示意图。
24.图23-图26是侧移机构700的结构示意图,其中图24、图26为侧移机构700与取放小车600的配合状态示意图。
25.图27是取放小车600的机构示意图。
26.图28是取放轮组件位于取放轮轴660轴线所在中心面处剖视图。
27.图29是取放轮组件更换麦克纳姆轮后的结构示意图。
28.图30是盒夹510位于止退片520横截面方向的剖视图。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
30.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
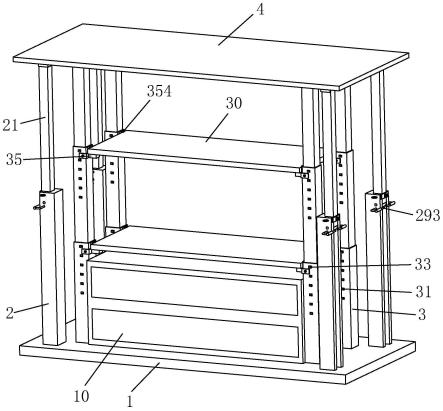
31.参见图1-图30,一种档案智慧存取装置,包括柜体100、取放小车600、夹爪机构a,柜体100内部安装有多个存放单元300,且柜体100上设置有取放口101;存放单元300包括存储壳310,存储壳310内部为中空的存储腔311,存储腔311内安装有多个盒夹510,两个盒夹510为一对,且每对盒夹510分别安装在存储腔311的上下两端面上;盒夹510内侧为盒夹槽511,每对盒夹510的盒夹槽511可分别与档案盒01的上下两端卡合装配,从而使得档案盒01阵列安装在存储腔311内;存放单元300与存放口101正对时称为工作单元300-1。
32.参见图27,取放小车600包括取放壳610,取放壳610内部为取放腔611,取放腔611内安装有多对盒夹510,两个盒夹510为一对,且每对盒夹510分别安装在取放腔611的上下两端面上;每对盒夹510的盒夹槽511可分别与档案盒01的上下两端卡合装配;参见图21-图22,夹爪机构a包括两块夹板a140,两块夹板a140之间为夹板间隙a143,两块夹板a140之间通过相互靠近或相互移动以调节夹板间隙a143的宽度,从而使两块夹板a140夹紧档案盒01或释放档案盒01;取放小车600与取放口101定位、且存放单元300与取放口101定位后,取放小车600上的每对盒夹510分别与存放单元300上的盒夹510正对;此时通过夹爪机构a的两块夹板a140夹紧储单元300内的档案盒01并送入取放小车600对应的盒夹510内即可完成档案盒的取出,或通过夹爪机构a的两块夹板a140夹紧取放小车600内的档案盒01并送入储单元300对应的盒夹510内完成档案盒01的装入。
33.优选地,参见图10、图30,所述盒夹510的一端开口、另一端封闭,且盒夹510的开口端处设置有止退槽512,所述止退槽512内安装有止退片520,止退片520具有弹性且一端与盒夹510装配、另一端为开放端521,开放端521进入盒夹槽511内从而遮挡档案盒01,使得档案盒01不会滑出盒夹槽511。这样档案盒在上下两端及两侧受到盒夹槽511的限制,而档案盒的两端分别受到开放端521、盒夹510的封闭端限制,也就使得档案盒在非需要的前提下不会掉出盒夹槽511。而档案盒01需要穿过开放端521时,只需要档案盒01具有足够的力量克服止退片520的弹力,使得开放端521弯折退出盒夹槽511即可,这种设计大大方面了档案盒进出盒夹槽511。
34.优选地,参见图1-图6、图23-图28,所述取送小车600还包括碰撞开关201、取放轮组件,所述碰撞开关201安装在取送壳610上且碰撞开关201的触发端正对柜体100。使用时取送小车600位于碰撞开关201触发端的一侧面向柜体100移动,直到碰撞开关201被触发,
碰撞开关201向取送小车600的车载工控机发送信号,从而判断为取送小车600与柜体100完成第一次定位。本实施例中,取送小车600内安装有车载无线模块、电池、车载电机驱动器等,车载无线模块与服务器或柜体100内置的柜体无线模块无线通讯,从而使得车载工控机能与服务器、柜体100内置的柜体工控机无线通讯,以实现数据、指令交互,当然这是现有技术。
35.所述取放轮组件包括取放电机630,取放电机630安装在取送壳610上且其取放电机轴631通过取放轮皮带670与取放轮轴660连接并构成带传动机构,所述取放轮轴660可圆周转动地安装在取放轮架640上,取放轮架640安装在取送壳610上;所述取放轮架640上还安装有取放轮650。取放电机630启动后可以通过取放轮皮带670驱动取放轮轴660、取放轮650转动,从而驱动取送小车600行驶。本实施例中,取放轮组件至少有四个,使用时,通过不同取放轮的转速、转向等即可控制整个取放小车的转向、前进、后退。
36.参见图29,本实施例中,可以将取放轮650采用麦克纳姆轮,使用时利用四个麦克纳姆轮即可实现整个取放小车的转向、前进、后退、平移等。而目前麦克纳姆轮的控制技术比较成熟,因此成本低、控制精度高。优选地,可以去除取放轮组件,然后增加agv小车,此时将取放壳610安装在acv小车上即可,目前agv小车的技术非常成熟,其可以实现自动导航、定位,且重复定位精度达到了毫米级,因此十分可靠,可以满足取送小车600与取放口101的定位要求。
37.参见图1-图6、图23-图27,由于本发明要求取送小车600与存放单元300之间具有较高的定位精度,从而确保档案盒的取送,因此本实施例还增加了侧移机构700,所述侧移机构700包括安装在柜体100上的侧移架710,侧移架710沿着取放口101长度方向上安装且侧移架710上安装有侧移皮带550,侧移皮带550绕过侧移皮带轴420,侧移皮带轴420一端装入柜体100内且与侧移电机211的输出轴连接,侧移电机211启动后能够驱动侧移皮带轴420转动,从而驱动侧移皮带550运行。
38.所述侧移皮带550与侧移壳720装配,侧移壳720上安装有第一侧移壳板721、两块第二侧移壳板722,两块第二侧移壳板722分别与拉升轴442可圆周转动装配,第一侧移壳板721、其中一块第二侧移壳板722分别与对中螺杆411可圆周转动且不可轴向移动装配;所述拉升轴442上可轴向滑动、不可相对圆周转动(通过花键、花键槽)地套装有两个升降卷轮741,每个升降卷轮741分别可圆周转动、不可轴向移动地安装在一个对中壳730上,每个对中壳730分别与一根对中齿条561的一端装配,两根对中齿条561分别与对中齿轮562的两侧啮合传动,对中齿轮562套装在对中齿轴443上,对中齿轴443安装在侧移壳720上;其中一根对中齿条561上安装有齿条螺纹座5611,所述齿条螺纹座5611套装在对中螺杆441上且与之通过螺纹旋合装配,对中螺杆441转动时能带动齿条螺纹座5611沿着其轴向移动,从而驱动两个对中壳730同步靠近或同步远离移动。
39.每个对中壳720上分别安装有一个伸缩滑轨750,伸缩滑轨750远离对中壳720的一端上安装有拉升梁751、拉升座752,所述拉升座752安装在拉升梁751上,且拉升座752以拉索740的一端装配,拉索740的另一端与升降卷轮741装配固定、收卷。使用时,可以通过升降卷轮741收放拉索740实现拉升梁751的升降。
40.所述取放壳610的两侧上分别安装有拉升件620,所述拉升件620包括对中板部分622、拉升板部分621。取放小车600与柜体100完成第一次定位时,两根拉升梁751分别位于
取放壳610安装有拉升件620的两侧;此时由于存在定位误差,因此转动对中螺杆441,从而驱动两根拉升梁751同步向对中板部分622夹紧,直到达到相应的夹紧力,此时利用两根拉升梁751带动取放壳610完成对中定位,也就是第二次定位,这次定位可以大大增加取放壳610与柜体100的定位精度,其精度可以控制在微米级别。然后转动拉升轴442,使得升降卷轮741收卷拉索740,拉索740带动拉升梁751在伸缩滑轨750的引导下上移,从而使得拉升梁751与拉升板部分621压紧并通过拉升板部分621带动整个取放小车600上移,直到拉升轴442的扭矩达到预设要求,此时取放壳610上移至与取放口101处的存放单元300正对,也就是取放壳610上的盒夹槽511与对应存放单元300的盒夹槽511正对。由于存放单元300的长度一般比取放壳610大,此时可以启动侧移电机,利用侧移皮带550带动侧移壳720从而带动取放壳610沿着取放口101移动即可。而本实施例中,侧移电机采用伺服电机,其可以准确控制取放壳610与存放单元300任一位置完成定位且此时取放壳610上的盒夹槽保持与存放单元300上对应的盒夹槽正对,当然也可以设置传感器探测是否完成定位,这是第三次定位。这样既可对整个存放单元300内的档案盒进行取放操作,且定位精度高。取放操作完成后,拉索释放,从而驱动取放小车下移复位,再驱动两根拉升梁751相互远离从而与对中板部分622分离,此时可以移出取放小车。
41.优选地,所述拉升轴442的一端装入锁套780内且与之可轴向滑动、不可相对圆周转动装配,所述拉升轴442与侧移壳720可圆周转动、不可轴向移动装配;所述锁套780一端安装有第二锁轮762、另一端穿出侧移壳720后与第四摩擦轮574装配,所述锁套780可相对于侧移壳720轴向滑动、圆周转动,与锁套780装配的第二侧移壳板722上安装有第一锁轮761,所述第一锁轮761可与第二锁轮762压紧,从而使得锁套780、拉升轴442无法圆周转动。本实施例中可以在第一锁轮761、第二锁轮762相互压紧的端面上设置相互啮合的卡齿,从而增加锁紧效果。所述侧移壳720内还安装有第三侧移壳板723,所述拉升轴442位于第三侧移壳板723、第二锁轮762之间的部分上套装有上锁弹簧770,上锁弹簧770对第二锁轮762施加向第一锁轮761压紧的弹力,从而使得初始状态时,第一锁轮761、第二锁轮762相互压紧。
42.对中螺杆441的一端穿出侧移壳720后与第三摩擦轮573装配,所述第四摩擦轮574、第三摩擦轮573可分别与第二摩擦轮572、第一摩擦轮571压紧传动,所述第二摩擦轮572、第一摩擦轮571分别安装在拉升驱动轴432、对中驱动轴431上,所述拉升驱动轴432、对中驱动轴431分别可圆周转动地安装在外驱轴板140上,外驱轴板140安装在柜体100上;且拉升驱动轴432、对中驱动轴431分别通过拉升电机214、对中电机213直接或间接驱动。本实施例中,拉升驱动轴432、对中驱动轴431分别通过不同的同步带与拉升电机214的电机轴、对中电机213的电机轴连接并构成带传动机构,所述拉升电机214、对中电机213均安装在柜体内,且拉升电机214、对中电机213均采用伺服电机。在使用时,利用拉升电机214、对中电机213探测的扭矩(功率)是否达到预设阈值即可判断对输送小车的拉升、对中是否到位。这种设计十分简单,可以降低传感器的使用,从而降低成本且确保对应的定位精度。而第四摩擦轮574与第二摩擦轮572压紧时会挤压上锁弹簧770以使得第一锁轮761、第二锁轮762分离,此时锁套780、拉升轴442可以转动。一旦侧移壳720移动后,第四摩擦轮574没有挤压力,则第一锁轮761、第二锁轮762快速恢复压紧。本实施例中,可以将取送小车先提升至超过预设高度,在第一锁轮761、第二锁轮762快速恢复压紧的区间取送小车回有一定的下落量,只要调试到这个下落量与超过预设高度基本相同即可保证定位精度。
43.使用时,拉升电机214、对中电机213分别驱动拉升驱动轴432、对中驱动轴431转动,拉升驱动轴432、对中驱动轴431分别通过第二摩擦轮572、第一摩擦轮571带动第四摩擦轮574、第三摩擦轮573同步转动,也就是带动拉升轴442、对中螺杆441转动,从而实现输送小车的对中、拉升等操作。本实施例中,第二摩擦轮572与第四摩擦轮574、第一摩擦轮571与第三摩擦轮573相互压紧的端面之间可以设置相互咬合的端面卡齿,从而增加传动效果及传动的稳定性。
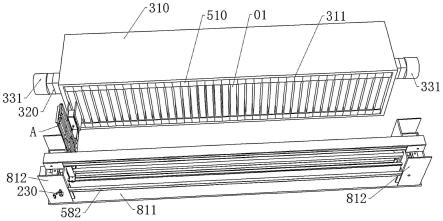
44.参见图7-图10,所述存放单元300还包括安装在存放壳310两端在安装座312,所述安装座312与导轮轴330可圆周转动装配,所述导轮轴330上分别套装有连接座320、导轮331。
45.参见图1-图11,所述柜体100包括两块侧柜板110、面板110,所述面板110的两端分别与两块侧柜板110的两侧装配,所述侧柜板110内侧设置有导向槽111,导向槽111与导轮331卡合装配且导轮331可在导向槽111内滚动、移动,所述侧柜板110内侧还安装有引导框130,所述引导框130与存放壳310的外壁贴合且可滑动装配,以此防止存放壳310在移动时发生晃动,从而确保存放壳310沿着导向槽111、引导框130循环移动。所述连接座320与循环皮带540装配,循环皮带540分别绕过多根第二引导轴414、第一引导轴413、第三引导轴412并构成带传动结构,所述循环皮带540沿着导向槽111安装;两块侧柜板110上的第三引导轴412分别通过第一传动带531、第二传动带532与循环联动轴411连接并构成带传动机构,所述循环联动轴411与两块侧柜板110可圆周转动装配。其中一块侧柜板110上的第二引导轴414与循环电机212的输出轴连接,循环电机212启动后能够驱动循环皮带540运行,从而带动各个存放单元300沿着导向槽111、引导框130循环移动,以此实现各个存放单元300循环移动,也就是每个存放单元300都可与取放口101正对、定位,以实现对每个存放单元300进行档案盒取放。
46.参见图5-图16,柜体100内、与取放口101对应处还安装有底座机构800,所述底座机构800上安装有夹爪机构a,底座机构800包括底板811,底板811的两端分别与两块侧柜板110装配;所述底板811上分别安装有两个端架812,两个端架812之间分别安装有第一导轨821、第二导轨822、传感器板823,所述传感器板823上安装有与存放单元300上各个盒夹510正对的光电传感器202,所述夹爪机构a上安装有感应片,当夹爪机构a与某一盒夹510正对时,感应片装入对应的光电传感器202内,从而使得光电传感器202向柜体工控机输送信号,此时判断为夹爪机构a与对应的盒夹510正对。
47.所述第一导轨821、第二导轨822用于和安装在夹爪机构a上的两个导轮座a120卡合且可滑动装配,从而对夹爪机构a的移动提供引导。优选地,所述导轮座a120上安装有滚轮a121,所述滚轮a121夹紧在第一导轨821或第二导轨822上,从而对夹爪机构a的移动提供引导。
48.底座机构800上还安装有两个离合机构,每个离合机构包括分别安装在两个锻件812上的离合组件,两个离合机构分别用于驱动第一传动轴461、第二传动轴462升降,从而控制第一传动轴461、第二传动轴462分别与第一主动轮a211、第二主动轮a212之间的传动或动力切断。
49.所述离合组件包括电缸230,电缸230的外壳与端架812铰接、电缸230的电缸轴231与扭转件850铰接,扭转件850安装在第一离合转轴451上,第一离合转轴451可圆周转动地
安装在端架812上,且第一离合转轴451与凸轮831的一端装配,凸轮831的另一端通过第二离合转轴452与离合杆832的一端铰接,所述离合杆832的另一端通过第三离合转轴453与第一离合座841铰接,所述第一离合座841内部与第二离合座842卡合且可滑动装配,所述第二离合座842与离合导向轴472的一端装配,离合导向轴472的另一端套装离合弹簧801后与第一离合座841可轴向滑动装配,所述离合弹簧801对第二离合座842施加远离第一离合座841的推力。
50.所述第二离合座842与第一传动轴461或第二传动轴462可圆周转动装配,且第二离合座842上还安装有离合导板843,所述离合导板843可轴向滑动地套装在离合滑轴471上,所述离合滑轴471安装在离合滑轴板8131上,所述离合滑轴板8131安装在离合架813上,离合架813安装在端架812上。使用时,通过控制电缸230驱动电缸轴231的伸缩即可控制第一离合转轴451转动,从而通过凸轮831、离合杆832带动第一传动轴461或第二传动轴462升降,也就能控制第一传动轴461、第二传动轴462分别与第一主动轮a211、第二主动轮a212是否压紧,不压紧则传动断开,压紧则传动连通。本实施例中,可以将属于同一个离合机构的其中一个离合组件的电缸230去除,并将离合机构的两个离合组件的第一离合转轴451之间通过离合皮带582连接并构成带传动机构。使用时,通过一个电缸230、离合皮带582离合同时驱动两根第一离合转轴451同步转动,以此简化结构,降低成本,且提高两个离合组件的同步性能。
51.第一传动轴461的一端、第二传动轴462的一端分别通过不同的万向节与第一传动电机221的电机轴、第二传动电机222的电机轴连接,所述第一传动电机221、第二传动电机222分别安装在其中一个离合架813上。使用时,第一传动轴461、第二传动轴462的移动可以通过万向节进行自适应,且第一传动电机221、第二传动电机222保持对第一传动轴461、第二传动轴462的驱动。也就是第一传动电机221、第二传动电机222驱动后可以分别驱动第一传动轴461、第二传动轴462圆周转动,此时如果第一传动轴461、第二传动轴462分别与第一主动轮a211、第二主动轮a212压紧传动则可以通过摩擦力分别驱动第一主动轮a211、第二主动轮a212转动。优选地,第一传动轴461、第二传动轴462的轴向上分别设置有轴向传动凸起(类似于花键),所述第一主动轮a211、第二主动轮a212的表面上分别设置有与轴向传动凸起卡合的轮凸起或凹槽,轮凸起或凹槽可与轴向传动凸起啮合传动,以此提高传动的稳定性及效率,防止打滑。本实施例中,第一传动轴461、第二传动轴462与第一主动轮a211、第二主动轮a212可分离式设计主要是考虑到第一主动轮a211、第二主动轮a212会沿着第一传动轴461、第二传动轴462轴向移动,分离后需可以大大降低磨损以及夹爪机构a的阻力,同时还具有防误触、防误动的功能。当然,本实施例中可以将第一主动轮a211、第二主动轮a212分别不可相对圆周转动且可轴向滑动地套装在第一传动轴461、第二传动轴462上,从而去除离合机构以进行传动。但是这种方式一方面对第一传动轴461、第二传动轴462的同轴度、圆跳动要求很高,导致制造成本高,另一方面防误触、防过载性能不行,因为后续需要通过探测扭矩判断定位,一旦防过载性能不行则容易造成电机烧毁。
52.所述底座机构800上还安装有夹爪皮带581,所述夹爪皮带581通过夹爪输送电机223驱动,夹爪输送电机223安装在底座机构800上,夹爪皮带581与夹爪架a110装配从而可以驱动夹爪机构a移动。使用时,通过夹爪皮带581驱动夹爪机构a移动,从而使得夹爪机构a对应不同的盒夹510。夹爪输送电机223采用伺服电机,本实施例中,将夹爪输送电机223与
侧移电机211设置为关联同步状态,从而利用伺服电机的高精度控制实现夹爪机构a、侧移壳720的同步移动,也就是实现取送小车与夹爪机构a的同步移动,当然也可以不同步,具体考虑取送小车的盒夹槽511与存放单元的盒夹槽511之间的对应关系,这部分可以利用间接定位、换算等方式关联驱动夹爪输送电机223与侧移电机211。
53.参见图10-图22,所述夹爪机构a包括夹爪架a110,所述夹爪架a110上安装有导轮座a120、感应片、第一主动轮a211、第二主动轮a212,所述第一主动轮a211、第二主动轮a212分别安装在第一拉绳轴a471、第一伸展轴a461上,所述第一拉绳轴a471、第一伸展轴a461分别可圆周转动地安装在夹爪架a110上,且第一拉绳轴a471、第一伸展轴a461上还分别安装有第一拉绳齿241、第一伸展齿231,所述第一拉绳齿241、第一伸展齿231分别与第二拉绳齿242、第二伸展齿232啮合传动,所述第二拉绳齿242、第二伸展齿232分别安装在第二拉绳轴a472、第二伸展轴a462上,所述第二拉绳轴a472、第二伸展轴a462分别可圆周转动地安装在夹爪架a110上;第二伸展轴a462上安装在第三伸展齿233,第三伸展齿233与第四伸展齿234啮合传动,第四伸展齿234安装在伸展动力轴440上,伸展动力轴440可圆周转动地安装在夹爪架a110上且伸展动力轴a440上还设置有伸展蜗杆部分a222,伸展蜗杆部分a222与伸展蜗轮a221啮合传动,所述伸展蜗轮a221安装在伸展蜗轮轴a450上,伸展蜗轮轴a450安装在第一二号连杆a312上且伸展蜗轮轴a450与夹爪架a110可圆周转动装配;所述第二拉绳轴a472设置有拉绳蜗杆部分a251,拉绳蜗杆部分a251与拉绳蜗轮a252啮合传动,拉绳蜗轮a252安装在拉绳卷轮轴a410上,拉绳卷轮轴a410可圆周转动地安装在夹爪架a110上且拉绳卷轮轴a410上不可相对圆周转动地安装有拉绳卷轮a334,拉绳卷轮a334与拉绳a330的一端装配、收卷,且拉绳卷轮轴a410圆周转动时可以驱动拉绳卷轮a334释放或收卷拉绳a330。
54.所述第一二号连杆a312远离伸展蜗轮轴a450的一端上安装有第三轴体a423,所述第三轴体a423与连板a350可圆周转动装配且第三轴体a423上安装有第一联动齿a341,所述第一联动齿a341与第二联动齿a342啮合传动,第二联动齿a342安装在第四轴体a424上,所述第四轴体a424安装在第二一号连杆a321的一端上且第四轴体a424与连板a350可圆周转动装配;所述连板a350还分别与第一一号连杆a311、第二二号连杆a322的一端铰接,所述第一一号连杆a311、第二二号连杆a322的另一端分别与夹爪架a110、连接架a130铰接,第二一号连杆a321远离连板一端与连板a350铰接;第一一号连杆a311、第二二号连杆a322分别与第一二号连杆a312、第二一号连杆a321平行,从而构成平行四杆机构。
55.所述伸展蜗轮轴a450圆周转动时会带动第一二号连杆a312以伸展蜗轮轴a450为中心转动,第一二号连杆a312转动时会通过第一联动齿a341与第二联动齿a342啮合从而驱动第四轴体a424转动,第四轴体a424带动第二一号连杆a321转动,从而带动连接架a130伸缩,而由于第一一号连杆a311与第一二号连杆a312、第二一号连杆a321与第二二号连杆a322分别构成平行四杆机构,因此连接架a130会保持在一个平面上相对于夹爪架a110伸缩,从而实现连接架a130(夹板a140的伸缩),且这种结构可以通过调节第一一号连杆a311与第一二号连杆a312、第二一号连杆a321与第二二号连杆a322的长度来调节伸缩位移量,大大方便了后期的调试以及对不同工况的适应性。
56.所述连接架a130上安装有夹座a150,所述夹座a150上分别设置有第一夹座板a151、第二夹座板a152、第三夹座板a153,所述第三夹座板a153的两端分别与第一夹座板a151、第二夹座板a152装配,同一块第三夹座板a153与两根第一夹杆a161的一端铰接,两根
第一夹杆a161的另一端与两块不同的第一夹板块a141铰接,两块第一夹板块a141分别安装在两块夹板a140上;两块夹板a140上还分别设置有第二夹板块a142,两块第二夹板块a142分别与两根第二夹杆a162的一端铰接,两根第二夹杆a162的另一端分别与铰接块a170铰接,所述铰接块a170安装在光轴a430的一端上,光轴a430的另一端穿过第一夹座板a151且与之可轴向滑动装配,所述光轴a430位于铰接块a170、第一夹座板a151之间的部分上套装有弹簧环a431,所述光轴a430位于弹簧环a431、第一夹座板a151之间的部分上套装有夹板弹簧a810,所述夹板弹簧a810对光轴a430施加向第二夹座板a152推动的弹力,从而使得初始状态时两块夹板a140之间的间距最小,此时两块夹板a140能夹紧档案盒01。
57.所述光轴a430与拉绳a330的另一端装配,拉绳a330分别绕过第一引导轮a331、第二引导轮a332、两个第三引导轮a333后与拉绳卷轮a334装配;两个第三引导轮a333分别安装在连接架a130、夹爪架a110上,且其中一个第三引导轮a333的轴线与第一引导轮a331的轴线连线与第一一号连杆a311的长度线(长度方向的边缘线,如图11中的竖直线)平行;另一第三引导轮a333的轴线与第二引导轮a332的轴线连线与第二一号连杆a321的长度线平行;所述第一引导轮a331、第二引导轮a332分别安装在第一轴体a421、第二轴体a422上,所述第一轴体a421、第二轴体a422分别安装在连板a350上。这种设计使得连接架a130伸缩时拉绳a330基本上不会产生伸缩量、牵拉力,因为拉绳实际上基本是沿着第二一号连杆a321、第一一号连杆a311、连板a350平行设置,因此第二一号连杆a321、第一一号连杆a311的伸缩对于拉绳并没有影响。也就是连接架a130伸缩时不会驱动夹板a140。需要夹板a140夹紧档案盒时,拉绳卷轮a334收卷拉绳,使得拉绳a330拉动光轴a430远离第二夹座板a152移动即可驱动两块夹板a140相互远离,从而可以松开档案盒或套在档案盒外。
58.取放小车与存放单元之间的档案盒取放过程大致如下:s100、将存放单元内的档案盒01取出至取放小车600内;s110、第二传动轴462、第一传动轴461上移,使得第二传动轴462、第一传动轴461分别与第二主动轮a212、第一主动轮a211压紧传动,首先第一传动轴461转动,从而驱动第一主动轮a211转动,第一主动轮a211带动拉绳卷轮a334转动收缩拉绳a330,从而使得两块夹板a140相互远离;第二传动轴462转动,从而驱动第二主动轮a212转动,以驱动伸展蜗轮轴a450转动,也就驱动连接架a130携带两块夹板a140向档案盒移动直到两块夹板a140套在档案盒外,第二传动轴462停止。
59.s120、第一传动轴461反转以释放拉绳a334,两块夹板a140相互靠近移动以夹紧档案盒。
60.s130、第二传动轴462继续转动,从而带动连接架a130、档案盒01向存放单元300外移动,直到将档案盒01推入取放小车600的盒夹槽511内并放置到位,第二传动轴462停止。
61.s140、第一传动轴461正转以收缩拉绳a334,两块夹板a140相互远离释放档案盒01。
62.s150、第二传动轴462反转,以驱动连接架a130回缩,直到连接架a130复位即可完成档案盒的取出。本实施例中,夹爪机构的设计主要是基于其功能和扁平的需求,从而避免其需要占用较宽的空间,从而影响存放单元、取放小车上档案盒的存放量。
63.s200、将取放小车内的档案盒放入存放单元内;s210、第二传动轴462、第一传动轴461上移,使得第二传动轴462、第一传动轴461
分别与第二主动轮a212、第一主动轮a211压紧传动,首先第一传动轴461转动,从而驱动第一主动轮a211转动,第一主动轮a211带动拉绳卷轮a334转动收缩拉绳a330,从而使得两块夹板a140相互远离;第二传动轴462转动,从而驱动第二主动轮a212转动,以驱动伸展蜗轮轴a450转动,也就驱动连接架a130携带两块夹板a140向档案盒移动直到两块夹板a140套在档案盒外,第二传动轴462停止。
64.s220、第一传动轴461反转以释放拉绳a334,两块夹板a140相互靠近移动以夹紧档案盒。
65.s230、第二传动轴462反转,以驱动连接架a130回缩,直到连接架a130携带档案盒进入存放单元的盒夹槽511内并放置到位。
66.s240、第一传动轴461正转以收缩拉绳a334,两块夹板a140相互远离释放档案盒01。
67.s250、第二传动轴462继续反转,从而带动连接架a130复位即可。本实施例中,可以通过探测第二传动轴462、第一传动轴461的扭矩,也就是第二传动电机222、第一传动电机221的功率即可判断连接架a130的位置,如两个最大位移点,第二传动电机222、第一传动电机221选用伺服电机。而可以通过第二传动电机222、第一传动电机221的输出特性结合夹爪机构的尺寸、运动轨迹等可以推算出连接架a130、拉绳的位置,从而便于自动定位,这些在后续的调试中可以通过程序控制。而夹爪套在档案盒上后,连接架a130的移动阻力明显增加,此时可以通过探测连接架a130的阻力变化判断夹板是否套在档案盒外。
68.本发明未详述之处,均为本领域技术人员的公知技术。
69.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。