1.本公开涉及向基板压接部件的部件压接装置等。
背景技术:
2.以往,作为电子部件安装装置,提供了向液晶面板等基板压接电子部件(以下简称为“部件”)的部件压接装置(参照专利文献1)。该部件压接装置具备从膜载体冲裁部件的冲裁装置,将以一定的间距输送膜载体并进行冲裁得到的部件压接到液晶面板。由此,生产压接有部件的基板即安装基板。
3.在先技术文献
4.专利文献
5.专利文献1:日本特开平7-106796号公报
6.然而,在上述专利文献1的部件压接装置中,存在安装精度可能下降的课题。
技术实现要素:
7.发明要解决的课题
8.因此,在本公开中,提供一种能够实现安装精度的提高的部件压接装置等。
9.用于解决课题的手段
10.本公开的一个方式涉及的部件压接装置具备:基板移动机构,对形成有第1对准标记的基板进行保持并使所述基板移动;压接工具,对形成有第2对准标记的部件进行保持并压接到所述基板;摄像部,对包含于摄像范围的被摄体进行摄像;摄像移动机构,使所述摄像部的摄像范围移动;和控制部,所述控制部进行如下控制:使所述摄像移动机构执行所述摄像范围的移动,以使得被所述压接工具保持的所述部件的端缘进入所述摄像范围,使所述摄像部将包含于所述摄像范围的所述部件的端缘作为所述被摄体来进行摄像,在所述第2对准标记未包含于所述摄像范围的情况下,在对所述部件的端缘进行摄像后,使所述摄像移动机构执行所述摄像范围的移动,以使得所述第2对准标记进入所述摄像范围,使所述摄像部将包含于所述摄像范围的所述第2对准标记作为所述被摄体来进行摄像,基于所述部件的端缘以及所述第2对准标记各自的摄像结果,生成并输出表示所述部件的端缘与所述第2对准标记的位置关系的关系信息,使所述基板移动机构执行所述基板的移动,以使得所述第1对准标记进入所述摄像范围,使所述摄像部将包含于所述摄像范围的所述第1对准标记作为所述被摄体来进行摄像,基于所述第1对准标记以及所述第2对准标记各自的摄像结果,控制由所述基板移动机构以及所述压接工具进行的所述部件向所述基板的压接。
11.另外,这些总括性的或具体的方式既可以作为系统、方法、集成电路、计算机程序或计算机可读取的cd-rom等记录介质来实现,也可以作为系统、方法、集成电路、计算机程序以及记录介质的任意的组合来实现。此外,记录介质也可以是非易失性记录介质。
12.发明效果
13.本公开的部件压接装置能够实现安装精度的提高。
14.本公开的一个方式中的进一步的优点以及效果将根据说明书以及附图而变得清楚。这些优点以及/或者效果分别通过若干实施方式和说明书以及附图所记载的特征来提供,但为了得到1个或1个以上的相同特征未必需要提供全部内容。
附图说明
15.图1是示出实施方式中的部件安装线的概略结构的图。
16.图2是实施方式中的部件安装线的俯视图。
17.图3是示出实施方式中的部件安装线具备的计算机和由该计算机控制的各构成要素的图。
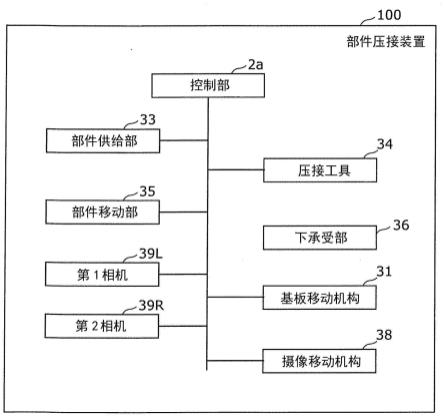
18.图4是示出实施方式中的部件压接装置的结构的框图。
19.图5是示出实施方式中的设置有多个部件的带构件和基板的一部分各自的一个例子的图。
20.图6是示出实施方式中的部件供给部的冲裁部的结构例的图。
21.图7是示出从实施方式中的部件供给部经由部件移动部供给到压接工具的部件的流动的图。
22.图8是由实施方式中的压接工具以及基板移动机构的工作台进行的部件的压接的步骤的一个例子的图。
23.图9是示出实施方式中的关系信息的一个例子的图。
24.图10是示出实施方式中的摄像部所包含的第1相机以及第2相机和摄像移动机构各自的一个例子的图。
25.图11是示出实施方式中的从x轴方向观察对部件进行摄像时的第1相机和部件的状态的图。
26.图12a是示出实施方式中的第1相机的摄像例的图。
27.图12b是示出实施方式中的第2相机的摄像例的图。
28.图13a是示出实施方式中的将部件的端缘作为被摄体的摄像的一个例子的图。
29.图13b是示出实施方式中的将第2对准标记作为被摄体的摄像的一个例子的图。
30.图14a是示出实施方式中的将部件的端缘作为被摄体的摄像的另一例的图。
31.图14b是示出实施方式中的将第2对准标记作为被摄体的摄像的另一例的图。
32.图15是示出实施方式中的部件压接装置的整体性的处理工序的流程图。
33.图16是示出图15的步骤s13中的位置关系确定处理的详细情况的流程图。
34.图17是用于说明实施方式中的摄像部以及摄像范围移动的时机的图。
35.图18是示出实施方式的变形例中的摄像移动机构的一部分的结构例的图。
36.符号说明
[0037]1ꢀꢀꢀ
部件安装线
[0038]2ꢀꢀꢀ
计算机
[0039]
2a
ꢀꢀ
控制部
[0040]
2b
ꢀꢀ
存储部
[0041]
2c
ꢀꢀ
显示部
[0042]3ꢀꢀꢀ
基板
[0043]4ꢀꢀꢀ
电极部
[0044]5ꢀꢀꢀ
部件
[0045]6ꢀꢀꢀ
电极部
[0046]
10
ꢀꢀ
基板搬入部
[0047]
20
ꢀꢀ
贴附部
[0048]
30
ꢀꢀ
预压接部
[0049]
31
ꢀꢀ
基板移动机构
[0050]
32
ꢀꢀ
部件搭载机构
[0051]
33
ꢀꢀ
部件供给部
[0052]
33a 供给卷盘
[0053]
33b 冲裁部
[0054]
33c 可动工作台
[0055]
33d 轨道
[0056]
34
ꢀꢀ
压接工具
[0057]
35
ꢀꢀ
部件移动部
[0058]
35a 移载头
[0059]
35b 移载工作台
[0060]
36
ꢀꢀ
下承受部
[0061]
37
ꢀꢀ
工作台
[0062]
37a 吸附孔
[0063]
38
ꢀꢀ
摄像移动机构
[0064]
38a 光学构件
[0065]
39
ꢀꢀ
摄像部
[0066]
39l 第1相机
[0067]
39r 第2相机
[0068]
40
ꢀꢀ
正式压接部
[0069]
50
ꢀꢀ
基板搬出部
[0070]
60
ꢀꢀ
搬运部
[0071]
70
ꢀꢀ
带构件
[0072]
91
ꢀꢀ
acf
[0073]
100 部件压接装置
[0074]
dl
ꢀꢀ
摄像范围
[0075]
dr
ꢀꢀ
摄像范围
[0076]
mb
ꢀꢀ
第1对准标记
[0077]
mc
ꢀꢀ
第2对准标记
具体实施方式
[0078]
(成为本公开的基础的见解)
[0079]
关于在“背景技术”一栏中记载的专利文献1的部件压接装置,本发明人发现会产
生以下的问题。
[0080]
随着最近的液晶面板的窄边框化,要求提高部件的冲裁精度。另外,冲裁精度是包含从膜载体冲裁的部件的位置的该部件的状态的精度。然而,如专利文献1那样仅通过冲裁装置的机械精度难以维持要求的精度。此外,如果为了维持冲裁精度而在冲裁装置设置冲裁状态确认用的传感器,则冲裁装置可能大型化。因此,如果将使用于部件与基板的位置对齐的相机用作该冲裁状态确认用的传感器,则能够抑制冲裁装置的大型化。然而,在该情况下,有时需要为了部件与基板的位置对齐而移动相机。其结果,由于相机的移动而不能充分获得部件与基板的位置对齐的精度,安装精度可能下降。
[0081]
为了解决这样的课题,本公开的一个方式涉及的部件压接装置具备:基板移动机构,对形成有第1对准标记的基板进行保持并使所述基板移动;压接工具,对形成有第2对准标记的部件进行保持并压接到所述基板;摄像部,对包含于摄像范围的被摄体进行摄像;摄像移动机构,使所述摄像部的摄像范围移动;和控制部,所述控制部进行如下控制:使所述摄像移动机构执行所述摄像范围的移动,以使得被所述压接工具保持的所述部件的端缘进入所述摄像范围,使所述摄像部将包含于所述摄像范围的所述部件的端缘作为所述被摄体来进行摄像,在所述第2对准标记未包含于所述摄像范围的情况下,在对所述部件的端缘进行摄像后,使所述摄像移动机构执行所述摄像范围的移动,以使得所述第2对准标记进入所述摄像范围,使所述摄像部将包含于所述摄像范围的所述第2对准标记作为所述被摄体来进行摄像,基于所述部件的端缘以及所述第2对准标记各自的摄像结果,生成并输出表示所述部件的端缘与所述第2对准标记的位置关系的关系信息,使所述基板移动机构执行所述基板的移动,以使得所述第1对准标记进入所述摄像范围,使所述摄像部将包含于所述摄像范围的所述第1对准标记作为所述被摄体来进行摄像,基于所述第1对准标记以及所述第2对准标记各自的摄像结果,控制由所述基板移动机构以及所述压接工具进行的所述部件向所述基板的压接。例如,也可以是,所述部件压接装置还具备:冲裁部,从设置有多个部件的带构件依次冲裁所述多个部件的各部件,所述压接工具保持由所述冲裁部冲裁得到的部件并压接到所述基板。
[0082]
由此,不需要在冲裁部设置部件的冲裁状态确认用的传感器,能够抑制该冲裁部的大型化。即,在本公开的一个方式涉及的部件压接装置中,还能够将摄像部用作部件的冲裁状态确认用的传感器,因而能够抑制冲裁部的大型化。具体地,摄像部用于控制由基板移动机构以及压接工具进行的部件向基板的压接。例如在用于控制部件与基板的位置对齐的第1对准标记以及第2对准标记的摄像中,使用摄像部。在本公开的一个方式涉及的部件压接装置中,还使这样的摄像部对部件的端缘进行摄像,并进行关系信息的生成以及输出,由此还能够将该摄像部用作部件的冲裁状态确认用的传感器。因此,由于可以不特地在冲裁部设置部件的冲裁状态确认用的传感器,因而能够抑制冲裁部的大型化。
[0083]
在此,为了确认部件的冲裁状态,需要分别对部件的端缘和第2对准标记进行摄像,但在不能对它们同时进行摄像的情况下,需要使摄像范围移动来对它们单独地进行摄像。这样的情况下,例如,如果先对第2对准标记进行摄像,然后移动摄像范围,对部件的端缘进行摄像,则为了接下来进行的部件与基板的位置对齐,必须进一步使摄像范围移动以回到原位置。在该位置对齐中,需要第1对准标记的摄像,在第1对准标记的摄像和第2对准标记的摄像中,为了确保该位置对齐的精度,期望摄像范围位于相同的位置。然而,如果即
便使摄像范围回到原位置该位置的再现性也不充分,则部件与基板的位置对齐的精度下降。
[0084]
因此,在本公开的一个方式涉及的部件压接装置中,在不能对部件的端缘和第2对准标记同时进行摄像的情况下,先对部件的端缘进行摄像,接下来对第2对准标记进行摄像。其结果,无需使进行第2对准标记的摄像时的摄像范围移动,能够通过使基板移动而使基板的第1对准标记进入该摄像范围来对该第1对准标记进行摄像。因此,在第1对准标记的摄像和第2对准标记的摄像中,摄像范围的位置相等,因而能够充分地确保部件与基板的位置对齐的精度。即,能够实现安装精度的提高。其结果,既能抑制冲裁部的大型化,还能确认部件的冲裁状态,并且能够实现安装精度的提高。
[0085]
此外,也可以是,所述控制部进一步通过所述关系信息的输出来控制由所述冲裁部进行的从所述带构件的部件的冲裁。
[0086]
由此,能够将部件的端缘与第2对准标记的位置关系自动地保持为固定,能够简单地实现部件的冲裁精度的提高。
[0087]
此外,也可以是,所述控制部进一步生成将所述部件的端缘与所述第2对准标记之间的距离表示为所述位置关系的所述关系信息,在所述距离不在预先决定的允许范围内的情况下,通知在所述冲裁部中产生了不良情况。
[0088]
由此,能够针对作业者促使进行冲裁部的检查以及修理,从而提高冲裁精度。
[0089]
此外,也可以是,在从所述摄像部进行所述第2对准标记的摄像起到进行所述第1对准标记的摄像为止的期间,所述摄像移动机构不使所述摄像部的摄像范围移动。
[0090]
由此,在第1对准标记的摄像和第2对准标记的摄像中,摄像范围的位置相等,因而能够充分地确保部件与基板的位置对齐的精度。即,能够实现安装精度的提高。
[0091]
以下,一边参照附图一边对实施方式具体地进行说明。
[0092]
另外,以下说明的实施方式均示出总括性的或具体的例子。以下的实施方式中示出的数值、形状、材料、构成要素、构成要素的配置位置以及连接方式、步骤、步骤的顺序等是一个例子,主旨并不在于限定本公开。此外,对于以下的实施方式中的构成要素之中未记载于表示最上位概念的独立技术方案的构成要素,作为任意的构成要素来进行说明。此外,各图是示意图,未必严谨地进行了图示。此外,在各图中,对于相同的结构构件标注了相同的符号。此外,在以下的实施方式中,使用了大致相同等表述。例如,大致相同不仅指完全相同,还指实质上相同,即例如包含几%程度的误差。此外,大致相同的意思是在能够实现基于本公开的效果的范围内是相同的。对于其他使用了“大致”的表述也是同样的。
[0093]
(实施方式)
[0094]
[部件安装线的概略结构]
[0095]
图1是表示本实施方式中的部件安装线的概略结构的图。
[0096]
本实施方式中的部件安装线1是通过在作为液晶面板、有机el(electro-luminescence,电致发光)面板等显示器面板的基板3安装部件5来生产安装基板的系统。另外,部件5例如是驱动电路等电子部件。具体地,如图1所示,部件安装线1具有基板搬入部10、贴附部20、预压接部30、正式压接部40和基板搬出部50。基板搬入部10、贴附部20、预压接部30、正式压接部40以及基板搬出部50以该顺序被连结。
[0097]
基板搬入部10接受从作业者或上游侧的其他装置搬入的矩形的基板3。然后,该基
板3被搬出到下游侧的贴附部20。
[0098]
贴附部20接受从基板搬入部10搬出的基板3,分别在位于该基板3的周缘的多个电极部4贴附粘接构件。然后,贴附有该粘接构件的基板3被搬出到预压接部30。另外,多个电极部4分别例如由多个电极构成。
[0099]
预压接部30接受从贴附部20搬出的基板3,在该基板3的贴附有粘接构件的部位搭载并压接部件5。然后,压接有该部件5的基板3被搬出到正式压接部40。另外,由预压接部30执行的压接也被称为预压接。
[0100]
正式压接部40接受从预压接部30搬出的基板3,针对被预压接到该基板3的部件5进行正式压接(也称为热压接)。然后,进行了该正式压接的基板3被搬出到基板搬出部50。
[0101]
基板搬出部50接受从正式压接部40搬出的基板3。被基板搬出部50接受的基板3被搬出到下游侧。
[0102]
如此,部件安装线1执行分别在设置于搬入的基板3的周缘的多个电极部4安装部件5的部件安装作业,并从基板搬出部50搬出作为安装有部件5的基板3的安装基板。
[0103]
[部件安装线的详细结构]
[0104]
图2是本实施方式中的部件安装线1的俯视图。具体地,图2示出从上方观察部件安装线1的结构。另外,在本实施方式中,将基板的搬运方向称为x轴方向,将铅垂方向称为z轴方向,将与x轴方向以及z轴方向垂直的方向、即纵深方向称为y轴方向。此外,x轴方向的负侧以及正侧分别相当于基板的搬运方向的上游侧以及下游侧,z轴方向的负侧以及正侧分别相当于铅垂方向的下侧以及上侧,y轴方向的负侧以及正侧分别相当于纵深方向的近前侧以及里侧、或前侧以及后侧。
[0105]
基板搬入部10具备用于载置搬入的基板3的基台1a。在基板搬入部10的基台1a设置有载置基板3的工作台11。工作台11相对于基台1a沿z轴方向升降。此外,在工作台11的上表面设置有多个吸附孔11a。这样的工作台11对于从作业者或上游侧的其他装置搬入而载置在工作台11上的基板3,通过未图示的泵等吸引器而从吸附孔11a进行真空吸附并保持。
[0106]
贴附部20具备进行贴附作业(换言之,贴附工序)的功能,该贴附作业在基板3的电极部4贴附作为粘接构件的acf(anisotropic conductive film,各向异性导电膜)。另外,acf也被称为各向异性导电粘接剂,是用于使基板3的电极部4和部件5电导通的构件。贴附部20具备基板移动机构21和贴附机构22。
[0107]
基板移动机构21是使基板3移动的机构。基板移动机构21例如具备在x轴方向上可动的x轴台、在y轴方向上可动的y轴台、在z轴方向上可动的z轴台和工作台23。在基板移动机构21,在基台1b上从下方依次重叠设置有x轴台、y轴台、z轴台和工作台23。
[0108]
y轴台在y轴方向上延伸设置,沿x轴方向在x轴台上自由移动。z轴台沿y轴方向在y轴台上自由移动,使设置在上部的工作台23沿z轴方向升降且绕z轴旋转。
[0109]
此外,在工作台23的上表面,设置有多个吸附孔23a,工作台23进行真空吸附来保持载置于其上表面的基板3。如此,基板移动机构21对基板3进行吸附保持并使其在水平面内(具体为x轴方向以及y轴方向)移动,使其沿上下方向(具体为z轴方向)升降且绕z轴旋转。
[0110]
贴附机构22在基台1b的上方具备沿x轴方向排列的例如2个贴附头。各贴附头具备供给acf的供给部和用于在基板3贴附acf的贴附工具。2个贴附头分别在与基板3上的多个
电极部4对应的位置贴附acf。此外,在分别与2个贴附头对应的下方的位置具备贴附支承台。
[0111]
预压接部30执行预压接工序,预压接工序在基板3的贴附有acf的区域(即压接对象部位)搭载部件5来进行预压接。预压接部30具备基板移动机构31、部件搭载机构32、部件供给部33和部件移动部35。
[0112]
基板移动机构31具有与贴附部20的基板移动机构21同样的构造。具体地,基板移动机构31具有保持基板3的工作台37。在工作台37的上表面设置有多个吸附孔37a。基板移动机构31通过该多个吸附孔37a对载置于该工作台37上的基板3进行真空吸附来保持。此外,基板移动机构31具备使吸附保持基板3的工作台37在水平面内移动并沿上下方向升降且绕z轴旋转的功能。基板移动机构31通过该工作台37的移动以及旋转,使吸附保持的基板3的贴附有acf的区域位于部件搭载机构32的作为备用工作台的下承受部36的上方。此外,在基板3形成有后述的第1对准标记。即,本实施方式中的基板移动机构31对形成有第1对准标记的基板3进行保持,并使该基板3移动。
[0113]
部件供给部33在部件搭载机构32的里侧方(即y轴方向正侧)从基台1b的后部突出设置。例如,部件供给部33具备卷绕有tcp(tape carrierpackage,带载封装)等的带构件的供给卷盘33a、冲裁部33b、可动工作台33c和轨道33d。这样的部件供给部33通过这些构成要素的移动而从带构件依次供给部件5。
[0114]
部件移动部35保持从部件供给部33供给的部件5,并使其向部件搭载机构32所包含的压接工具34侧移动。
[0115]
部件搭载机构32被设置在基台1b上,具备压接工具34和下承受部36。
[0116]
下承受部36从下方支承作为保持于工作台37的基板3中的预先决定的部位的压接对象部位。另外,该压接对象部位是在基板3的缘部贴附有acf的部位。即,下承受部36对于要压接部件5的基板3的缘部从该基板3的下方侧进行支承。
[0117]
压接工具34保持部件5,在保持于工作台37的基板3压接部件5。在该部件5形成有后述的第2对准标记。即,本实施方式中的压接工具34对形成有第2对准标记的部件5进行保持,并将部件5压接到基板3。具体地,压接工具34沿z轴方向升降,从上方吸附(即拾取)由部件移动部35移动的部件5。而且,压接工具34将吸附的部件5搭载于acf上并连同基板3一起向下承受部36按压,从而在基板3预压接部件5。例如,压接工具34在被加热至约80℃的状态下,将部件5压接到基板3。另外,预压接部30也可以具备使由基板移动机构31保持的基板3的方向旋转90度的机构。
[0118]
正式压接部40执行正式压接工序(即,热压接工序),正式压接工序对由预压接部30预压接到基板3的部件5正式压接(即,热压接)到基板3。由此,形成在基板3的电极部4和部件5经由acf而被电连接。这样的正式压接部40具备基板移动机构41和压接机构42。
[0119]
基板移动机构41具有与贴附部20的基板移动机构21同样的构造。具体地,基板移动机构41具有工作台49。在工作台49的上表面设置有多个吸附孔49a。基板移动机构41通过该多个吸附孔49a对载置于该工作台49上的基板3进行真空吸附来保持。此外,基板移动机构41具备使对基板3进行吸附保持的工作台49在水平面内移动并沿上下方向升降且绕z轴旋转的功能。基板移动机构41通过该工作台49的移动以及旋转,使吸附保持的基板3的预压接有部件5的区域位于压接机构42的下承受部46的上方。
[0120]
压接机构42被设置在基台1b上,具备压接工具43和下承受部46。
[0121]
压接工具43被加热,将由下承受部46支承的基板3的部件5向下承受部46侧按压。例如,压接工具43在被加热至约200℃的状态下按压部件5。由此,部件5被正式压接,形成在基板3的电极部4和部件5经由acf而被电连接。
[0122]
基板搬出部50具备对从正式压接部40搬运的基板3进行真空吸附而将其保持在工作台51上的功能。在基板搬出部50中保持的基板3被搬出到下游侧的其他装置,或者由作业者从工作台51取出。
[0123]
工作台51相对于基台1c而沿z轴方向升降。此外,在工作台51的上表面设置有多个吸附孔51a,工作台51在其上表面真空吸附而保持从正式压接部40移送的基板3。
[0124]
搬运部60是搬运基板3的装置。具体地,搬运部60具备将搬入到基板搬入部10的基板3向贴附部20、预压接部30、正式压接部40以及基板搬出部50以该顺序交接(移送)的功能。搬运部60被配置在贴附部20、预压接部30以及正式压接部40的前方区域(即y轴方向负侧)。
[0125]
搬运部60在跨越基台1a、基台1b以及基台1c而沿x轴方向延伸的移动基台61上,具备从上游侧依次配置的基板搬运机构62a、基板搬运机构62b、基板搬运机构62c以及基板搬运机构62d。
[0126]
基板搬运机构62a~62d分别具备基部63以及1个以上的臂单元64。在本实施方式中,例示了基板搬运机构62a~62d分别具备2台臂单元64的情况。
[0127]
基部63被设置在移动基台61上,沿x轴方向自由移动。在基部63上,2台臂单元64沿x轴方向排列设置。臂单元64从上方真空吸附基板3。
[0128]
基板搬运机构62a~62d分别向从上方真空吸附工作台11、23、37、49、51所保持的基板3的基板交接位置移动,从升降的工作台11、23、37、49、51进行基板3的接受或交付。例如,基板搬运机构62a接受载置于基板搬入部10的工作台11的基板3,并交付给贴附部20的工作台23。此外,例如,基板搬运机构62b从贴附部20的工作台23接受基板3,并交付给预压接部30的工作台37。此外,例如,基板搬运机构62c从预压接部30的工作台37接受基板3,并交付给正式压接部40的工作台49。此外,例如,基板搬运机构62d从正式压接部40的工作台49接受基板3,并交付给基板搬出部50的工作台51。
[0129]
图3是示出部件安装线1具备的计算机和由该计算机控制的各构成要素的图。
[0130]
如图3所示,部件安装线1具备计算机2。该计算机2例如与贴附部20、预压接部30、正式压接部40以及搬运部60等例如通过控制线而能够通信地连接,控制这些各部分。计算机2具备控制部2a、存储部2b和显示部2c。
[0131]
显示部2c显示图像以及文字等,例如由液晶显示器、等离子体显示器、有机el(electro-luminescence,电致发光)显示器等构成。另外,显示部2c不限定于这些显示器。
[0132]
存储部2b存储基板3的尺寸、安装在基板3的部件5的种类、安装位置、安装方向以及移送基板3的时机等部件安装作业所需要的各种数据、和控制部2a执行的控制程序等。存储部2b例如由rom(read only memory,只读存储器)或ram(random access memory,随机存取存储器)等实现。
[0133]
控制部2a控制贴附部20的基板移动机构21、预压接部30的基板移动机构31、正式压接部40的基板移动机构41以及搬运部60,执行在各部分之间向下个工序移送基板3的基
板移送作业。基板移送作业中的基板3从上游侧向下游侧的移送在各部分之间同步进行。
[0134]
例如,控制部2a通过控制贴附部20,变更由基板移动机构21保持的基板3的朝向以及位置,通过头移动电机来变更多个贴附头的间隔,通过贴附机构22来使贴附部20执行在基板3贴附acf的贴附作业。
[0135]
此外,例如,控制部2a控制预压接部30。即,控制部2a变更由基板移动机构31保持的基板3的朝向以及位置,使部件搭载机构32执行部件5向基板3的预压接。此时,控制部2a也可以根据由预压接部30所具备的摄像部39进行摄像的结果来校正或变更基板3的位置。该摄像部39的摄像范围由摄像移动机构38移动。此外,控制部2a通过控制部件供给部33以及部件移动部35,使从部件供给部33供给的部件5向部件搭载机构32侧移动。
[0136]
此外,例如,控制部2a通过控制正式压接部40,变更被基板移动机构41保持的基板3的朝向以及位置,使压接机构42对被预压接到基板3的部件5进行正式压接。
[0137]
此外,控制部2a通过控制显示部2c而在该显示部2c显示图像以及文字等。
[0138]
这样的控制部2a例如由用于控制部件安装线1具有的各部分以及各机构的存储在存储部2b的控制程序和执行该控制程序的cpu(central processing unit)等处理器实现。
[0139]
[部件压接装置的结构]
[0140]
图4是示出本实施方式中的部件压接装置100的结构的框图。
[0141]
部件压接装置100由部件安装线1中的预压接部30和计算机2的控制部2a构成。
[0142]
具体地,部件压接装置100具备控制部2a、部件供给部33、部件移动部35、压接工具34、下承受部36、基板移动机构31、摄像移动机构38和第1相机39l以及第2相机39r。
[0143]
上述的摄像部39由其第1相机39l以及第2相机39r构成。第1相机39l以及第2相机39r分别对包含于摄像范围的被摄体进行摄像。摄像移动机构38使第1相机39l以及第2相机39r各自的摄像范围移动。摄像移动机构38通过使该第1相机39l以及第2相机39r各自的摄像范围移动,调整它们的摄像范围间的距离。进一步地,摄像移动机构38使第1相机39l以及第2相机39r各自的摄像范围沿着y轴方向移动。另外,它们的摄像范围间的距离也被称为光学系统间距或相机间距。例如,本实施方式中的摄像移动机构38通过使第1相机39l以及第2相机39r移动而使它们的摄像范围移动。
[0144]
控制部2a控制基板移动机构31、部件供给部33、压接工具34、部件移动部35、摄像移动机构38和第1相机39l以及第2相机39r。
[0145]
[部件的供给]
[0146]
图5是示出设置有多个部件5的带构件和基板3的一部分各自的一个例子的图。
[0147]
如图5的(a)所示,带构件70包含多个部件5。这些多个部件5沿着带构件70的长边方向排列,设置在相互隔开给定的间隔的位置。这样的带构件70是在具备柔软性的树脂制膜搭载了多个部件5的构件,也被称为膜载体。例如,带构件70是tcp。从该带构件70冲裁出单片状态的tcp或cof(chip on film,膜上芯片)来作为部件5。分别在该带构件70的宽度方向两端形成有沿着该带构件70的长边方向排列成一列的多个链轮齿孔71。
[0148]
在部件5形成有由多个电极构成的电极部6和一对第2对准标记mc。构成部件5的材料不特别限定,但例如是聚酰亚胺等树脂。
[0149]
电极部6所包含的各电极是设置在部件5的表面的金属等的导电性的构件。多个电极例如沿着带构件70的宽度方向排列配置。
[0150]
一对第2对准标记mc分别是用于获取基板3与部件5的位置关系的标记。例如,一对第2对准标记mc分别是十字状的标记,配置为沿着带构件70的宽度方向夹着电极部6。
[0151]
如图5的(b)所示,在基板3形成有由多个电极构成的电极部4和一对第1对准标记mb。电极部4所包含的各电极是设置在基板3的表面的金属等的导电性的构件。多个电极例如沿着x轴方向排列配置。
[0152]
一对第1对准标记mb分别是用于获取基板3与部件5的位置关系的标记。例如,一对第1对准标记mb分别是十字状的标记,配置为沿着x轴方向夹着电极部4。此外,在该电极部4贴附有上述的acf 91。
[0153]
图6是示出部件供给部33的冲裁部33b的结构例的图。冲裁部33b一边以一定的间距输送带构件70,一边从该带构件70依次冲裁多个部件5。例如,冲裁部33b具备与设置在带构件70的链轮齿孔71卡合的链轮齿331、旋转驱动链轮齿331的电机332、从带构件70冲裁部件5的冲头333以及冲模334。电机332由控制部2a控制,通过旋转驱动链轮齿331,以一定的间距输送带构件70。另外,电机332能够对带构件70的输送量进行微调整。由冲裁部33b从带构件70冲裁得到的部件5被载置于可动工作台33c。
[0154]
图7是示出从部件供给部33经由部件移动部35而供给到压接工具34的部件5的流动的图。
[0155]
部件供给部33具备冲裁部33b、供给卷盘33a、盖带(cover tape)回收部336、卷绕部335、可动工作台33c和轨道33d。
[0156]
在供给卷盘33a卷绕有带构件70。该带构件70的前端侧由冲裁部33b从供给卷盘33a张紧地引出。盖带回收部336回收从带构件70剥离的盖带72。卷绕部335卷绕带构件70的剩余部分来进行回收。带构件70的剩余部分是从带构件70剥离盖带72并冲裁了部件5后的剩余的部分。可动工作台33c从该冲裁部33b接受并保持由冲裁部33b冲裁的部件5,沿着轨道33d移动。
[0157]
部件移动部35具备移载头35a和移载工作台35b。移载头35a将保持在沿着轨道33d移动的可动工作台33c的部件5从该可动工作台33c接受。然后,移载头35a一边对该部件5进行吸附保持一边向压接工具34侧移动。移载工作台35b从移动到压接工具34侧的移载头35a,接受被该移载头35a吸附保持的部件5。接受了部件5的移载工作台35b移动到压接工具34的下方。
[0158]
压接工具34吸附而保持载置于该移载工作台35b的部件5。在此,上述的由第1相机39l以及第2相机39r构成的摄像部39经由下承受部36对被压接工具34保持的部件5进行摄像。进一步地,摄像部39经由该下承受部36对保持在基板移动机构31的工作台37的基板3的缘部进行摄像。工作台37基于部件5以及基板3的缘部各自的摄像的结果,进行部件5与基板3的位置对齐。然后,压接工具34相对于位置对齐后的基板3压接部件5。
[0159]
如此,本实施方式中的部件压接装置100的部件供给部33具备从设置有多个部件5的带构件70依次冲裁多个部件5的各个部件的冲裁部33b。而且,压接工具34保持由该冲裁部33b冲裁得到的部件5,并将部件5压接到基板3。
[0160]
[部件的压接]
[0161]
图8是示出由压接工具34以及基板移动机构31的工作台37进行的部件5的压接的步骤的一个例子的图。
[0162]
首先,如图8的(a)所示,移载工作台35b向压接工具34以及下承受部36侧搬运部件5。接下来,如图8的(b)所示,移载工作台35b在压接工具34的下方停止,即在压接工具34与下承受部36之间停止。接下来,如图8的(c)所示,压接工具34下降,并保持部件5。由此,部件5被从移载工作台35b交接给压接工具34。然后,如图8的(d)所示,压接工具34在保持有部件5的状态下上升。
[0163]
接下来,如图8的(e)所示,交接了部件5的移载工作台35b从压接工具34的下方退避。然后,如图8的(f)所示,摄像部39对部件5进行摄像。在该摄像中,对部件5的端缘和第2对准标记mc进行摄像。该摄像结果用于由冲裁部33b对部件5的冲裁精度的确认。此外,第2对准标记mc的摄像结果用于部件5与基板3的位置对齐。另外,压接工具34也可以使部件5下降到摄像部39的焦点位置或其附近为止。此外,摄像部39也可以对焦点位置进行变更。接下来,如图8的(g)所示,在压接工具34下降了的情况下,该压接工具34上升,保持有基板3的工作台37移动。如图8的(h)所示,如果基板3的缘部通过该工作台37的移动而到达压接工具34的下方,则工作台37下降。由此,基板3的缘部被下承受部36从下方支承。此时,摄像部39对形成在基板3的第1对准标记mb进行摄像。然后,基于第1对准标记mb以及第2对准标记mc各自的摄像结果,工作台37调整基板3的位置。即,进行部件5与基板3的位置对齐。
[0164]
接下来,如图8的(i)所示,压接工具34为了将部件5安装到基板3的缘部而开始下降。然后,如图8的(j)所示,压接工具34在基板3的缘部按压部件5。其结果,部件5被预压接到基板3,通过安装在基板3的acf 91,部件5的电极部6与基板3的电极部4电导通。之后,如图8的(k)所示,压接工具34上升,预压接有部件5的基板3通过工作台37的移动被搬出。
[0165]
[关系信息]
[0166]
本实施方式中的控制部2a基于图8的(f)所示的状况下的由摄像部39对部件5的摄像结果,生成并输出表示部件5的冲裁精度的关系信息。
[0167]
图9是示出关系信息的一个例子的图。
[0168]
在关系信息中,分别针对一对第2对准标记mc,将该第2对准标记mc与位于该第2对准标记mc的周围的部件5的端缘的位置关系表示为部件5的冲裁精度。具体地,关系信息将部件5的端缘与第2对准标记mc之间的距离表示为位置关系。更具体地,关系信息表示针对x轴方向正侧的第2对准标记mc的距离xl以及距离yl与针对x轴方向负侧的第2对准标记mc的距离xr以及距离yr。
[0169]
距离xl是x轴方向正侧的第2对准标记mc与最接近该第2对准标记mc的沿着y轴方向的部件5的切割线之间的距离。距离yl是x轴方向正侧的第2对准标记mc与最接近该第2对准标记mc的沿着x轴方向的部件5的切割线之间的距离。
[0170]
另外,切割线是部件5的由冲裁部33b进行的冲裁而生成的该部件5的一条边。此外,位于x轴方向正侧的第2对准标记mc的周围的部件5的端缘由位于y轴方向负侧且沿着x轴方向的切割线和位于x轴方向正侧且沿着y轴方向的切割线构成。
[0171]
同样,距离xr是x轴方向负侧的第2对准标记mc与最接近该第2对准标记mc的沿着y轴方向的部件5的切割线之间的距离。距离yr是x轴方向负侧的第2对准标记mc与最接近该第2对准标记mc的沿着x轴方向的部件5的切割线之间的距离。另外,位于x轴方向负侧的第2对准标记mc的周围的部件5的端缘由位于y轴方向负侧且沿着x轴方向的切割线和位于x轴方向负侧且沿着y轴方向的切割线构成。
[0172]
这样的关系信息例如被反馈到冲裁部33b。即,本实施方式中的控制部2a通过该关系信息的输出来控制由冲裁部33b进行的从带构件70的部件5的冲裁。
[0173]
例如,在距离yl以及距离yr偏离了基准距离的情况下,冲裁部33b使部件5的冲裁位置沿带构件70的长边方向偏移,以使得这些距离接近基准距离。或者,冲裁部33b调整部件5的冲裁间隔。此外,在距离xl以及距离xr之中的任一个比基准距离短且另一个比基准距离长的情况下,冲裁部33b使部件5的冲裁位置沿着带构件70的宽度方向偏移,以使得这些距离接近基准距离。
[0174]
[基于摄像部的摄像的详细情况]
[0175]
图10是示出本实施方式中的摄像部39所包含的第1相机39l以及第2相机39r和摄像移动机构38各自的一个例子的图。
[0176]
第1相机39l以及第2相机39r被配置在下承受部36的下侧,对z轴方向上方进行摄像。此外,第1相机39l以及第2相机39r沿x轴方向排列。
[0177]
摄像移动机构38例如通过分别使第1相机39l以及第2相机39r移动而使它们的摄像范围移动。摄像移动机构38通过分别使第1相机39l以及第2相机39r沿着x轴方向移动来变更这些相机间的距离,即变更相机间距。进一步地,摄像移动机构38使第1相机39l以及第2相机39r沿y轴方向沿移动。
[0178]
在对部件5进行摄像时,压接工具34以由形成在部件5的多个电极构成的电极部6和配置为夹着该电极部6的一对第2对准标记mc朝向下方的状态吸附保持该部件5。而且,该一对第2对准标记mc配置为与下承受部36对置。
[0179]
第1相机39l以及第2相机39r经由下承受部36的2个贯通部h1,从下方侧对部件5的一对第2对准标记mc以及该部件5的2个端缘进行摄像。另外,2个贯通部h1例如分别是沿着x轴方向排列的在下承受部36的上表面具有开口的孔,并且沿着z轴方向贯通该下承受部36。第1相机39l经由x轴方向正侧的贯通部h1,对部件5的x轴方向正侧的第2对准标记mc和位于该第2对准标记mc的周围的部件5的端缘进行摄像。第2相机39r经由x轴方向负侧的贯通部h1,对部件5的x轴方向负侧的第2对准标记mc和位于该第2对准标记mc的周围的部件5的端缘进行摄像。另外,虽然本实施方式中的贯通部h1是孔,但也可以是向y轴方向正侧凹陷的沟槽,还可以由具有透光性的玻璃等构件构成。
[0180]
在对基板3进行摄像时,保持在工作台37的基板3的缘部被配置在下承受部36的上方。此外,在该缘部的上表面,形成有由多个电极构成的电极部4和被配置为夹着该电极部4的一对第1对准标记mb。进一步地,在该缘部的上表面,以覆盖电极部4的方式贴附有acf 91。
[0181]
第1相机39l以及第2相机39r经由下承受部36的2个贯通部h1,从下方侧对基板3的一对第1对准标记mb进行摄像。另外,基板3的形成有一对第1对准标记mb的部分具有透光性。因此,形成在基板3的上表面的第1对准标记mb经由具有该透光性的部分而被摄像。第1相机39l经由x轴方向正侧的贯通部h1对基板3的x轴方向正侧的第1对准标记mb进行摄像。第2相机39r经由x轴方向负侧的贯通部h1对基板3中的x轴方向负侧的第1对准标记mb进行摄像。
[0182]
图11是示出从x轴方向观察对部件5进行摄像时的第1相机39l和部件5的状态的图。
[0183]
如图11所示,第1相机39l从下承受部36的下侧经由该下承受部36的贯通部h1对位于下承受部36的上方的部件5进行摄像。第2相机39r也同样经由下承受部36的贯通部h1对部件5进行摄像。
[0184]
图12a以及图12b是示出第1相机39l以及第2相机39r各自的摄像例的图。
[0185]
在图12a的(a)以及(b)所示的例子中,在第1相机39l的摄像范围dl内,包含部件5中的x轴方向正侧的第2对准标记mc和位于该第2对准标记mc的周围的部件5的端缘。在该情况下,第1相机39l对该第2对准标记mc和部件5的端缘同时进行摄像。通过该摄像,生成作为拍摄到第2对准标记mc和部件5的端缘的图像的摄像数据。然后,如图12a的(a)所示,控制部2a根据该摄像数据来识别部件5的端缘的位置,进一步如图12a的(b)所示,识别第2对准标记mc的位置。
[0186]
同样,在图12b的(a)以及(b)所示的例子中,在第2相机39r的摄像范围dr内,包含部件5中的x轴方向负侧的第2对准标记mc和位于该第2对准标记mc的周围的部件5的端缘。在该情况下,第2相机39r对该第2对准标记mc和部件5的端缘同时进行摄像。通过该摄像,生成作为拍摄到第2对准标记mc和部件5的端缘的图像的摄像数据。然后,如图12b的(a)所示,控制部2a根据该摄像数据来识别部件5的端缘的位置,进一步如图12b的(b)所示,识别第2对准标记mc的位置。
[0187]
在此,有时在摄像范围dl以及dr各自内不包含第2对准标记mc和部件5的端缘这两者。例如,在部件5的端缘与第2对准标记mc之间的距离长的情况下,不能在摄像范围dl以及dr各自内包含第2对准标记mc和部件5的端缘这两者。在这样的情况下,本实施方式中的摄像移动机构38使第1相机39l的摄像范围dl和第2相机39r的摄像范围dr移动。然后,控制部2a先使第1相机39l以及第2相机39r对部件5的2个端缘进行摄像,接下来使第1相机39l以及第2相机39r对一对第2对准标记mc进行摄像。
[0188]
图13a是示出将部件5的端缘作为被摄体的摄像的一个例子的图。图13b是示出将第2对准标记mc作为被摄体的摄像的一个例子的图。
[0189]
如上述那样,存在不能在第1相机39l的摄像范围dl内包含第2对准标记mc和部件5的端缘这两者的情况。在这样的情况下,首先,如图13a的(a)所示,控制部2a通过控制摄像移动机构38,使该摄像范围dl移动,以使得部件5的端缘进入摄像范围dl内。然后,如图13a的(b)所示,控制部2a在对第2对准标记mc进行摄像之前,先使第1相机39l对部件5的端缘进行摄像。其结果,第1相机39l生成作为拍摄到该部件5的端缘的图像的摄像数据。
[0190]
在对部件5的端缘进行摄像之后,如图13b的(a)所示,控制部2a通过控制摄像移动机构38,使摄像范围dl向x轴方向负侧移动。由此,部件5的第2对准标记mc包含于摄像范围dl。然后,如图13b的(b)所示,控制部2a使第1相机39l对第2对准标记mc进行摄像。其结果,第1相机39l生成作为拍摄到该第2对准标记mc的图像的摄像数据。
[0191]
控制部2a根据图13a的(b)所示的部件5的端缘的摄像数据来识别摄像范围dl内的部件5的端缘的位置。进一步地,控制部2a根据图13b的(b)所示的第2对准标记mc的摄像数据来识别摄像范围dl内的第2对准标记mc的位置。然后,控制部2a基于部件5的端缘的位置、第2对准标记mc的位置和摄像范围dl的移动方向以及移动距离,确定部件5的端缘与第2对准标记mc的位置关系。控制部2a生成表示该位置关系的关系信息(xl,yl)。
[0192]
控制部2a针对第2相机39r的摄像范围dr也执行与图13a以及图13b所示的关于摄
像的处理同样的处理。由此,生成关系信息(xr,yr)。
[0193]
图14a是示出将部件5的端缘作为被摄体的摄像的另一例的图。图14b是示出将第2对准标记mc作为被摄体的摄像的另一例的图。
[0194]
与图13a所示的例子同样,在不能在摄像范围dl包含第2对准标记mc和部件5的端缘这两者情况下,首先,如图14a的(a)所示,控制部2a使部件5的端缘进入摄像范围dl。接下来,如图14a的(b)所示,控制部2a使第1相机39l对部件5的端缘进行摄像。其结果,第1相机39l生成作为拍摄到该部件5的端缘的图像的摄像数据。
[0195]
在对部件5的端缘进行摄像之后,控制部2a通过控制摄像移动机构38,如图14b的(a)所示,使摄像范围dl向y轴方向正侧移动。由此,部件5的第2对准标记mc包含于摄像范围dl。然后,如图14b的(b)所示,控制部2a使第1相机39l对第2对准标记mc进行摄像。其结果,第1相机39l生成作为拍摄到该第2对准标记mc的图像的摄像数据。
[0196]
[部件压接装置的处理流程]
[0197]
图15是示出本实施方式中的部件压接装置100的整体的处理工序的流程图。
[0198]
部件压接装置100的部件供给部33所包含的冲裁部33b执行从带构件70冲裁部件5的冲裁处理(步骤s11)。该冲裁得到的部件5由部件移动部35移动到压接工具34侧。
[0199]
接下来,压接工具34吸附而保持从该部件供给部33供给的部件5(步骤s12)。然后,控制部2a执行位置关系确定处理,在位置关系确定处理中,使摄像部39对被该压接工具34保持的部件5进行摄像来确定部件5的端缘与第2对准标记mc的位置关系(步骤s13)。在该步骤s13中,通过摄像部39对部件5的摄像,生成分别拍摄到形成在部件5的一对第2对准标记mc的摄像数据。
[0200]
然后,控制部2a判定该位置关系是否在允许范围内(步骤s14)。在此,如果判定为位置关系在允许范围内(步骤s14的是),则控制部2a将该位置关系反馈到冲裁处理(步骤s15)。即,控制部2a通过将表示该位置关系的关系信息输出到部件供给部33的冲裁部33b,使该冲裁部33b调整由冲裁部33b对部件5进行冲裁的位置。
[0201]
然后,控制部2a不变更在步骤s13的处理的最后设定的摄像部39的摄像范围dl以及摄像范围dr的位置,通过控制基板移动机构31而使基板3向下承受部36侧移动。控制部2a通过该基板3的移动,分别使基板3的一对第1对准标记mb进入摄像范围dl以及摄像范围dr(步骤s16)。即,控制部2a使基板移动机构31执行基板3的移动,以使得一对第1对准标记mb分别进入摄像范围dl以及摄像范围dr。
[0202]
接下来,控制部2a使摄像部39分别将包含于摄像范围dl以及摄像范围dr的一对第1对准标记mb作为被摄体来进行摄像(步骤s17)。即,第1相机39l对包含于摄像范围dl的第1对准标记mb进行摄像,第2相机39r对包含于摄像范围dr的第1对准标记mb进行摄像。由此,生成分别拍摄到一对第1对准标记mb的摄像数据。
[0203]
接下来,控制部2a基于部件5的一对第2对准标记mc和基板3的一对第1对准标记mb,使基板移动机构31执行基板3的位置调整(步骤s18)。即,控制部2a根据第1对准标记mb的摄像数据来识别第1对准标记mb的位置,根据第2对准标记mc的摄像数据来识别第2对准标记mc的位置。然后,保持有基板3的基板移动机构31的工作台37通过由控制部2a进行的控制来调整基板3的位置,以使得一对第2对准标记mc与一对第1对准标记mb重叠。由此,进行部件5与基板3的位置对齐。然后,控制部2a通过使压接工具34下降,在被下承受部36支承的
基板3的缘部压接部件5(步骤s19)。即,控制部2a基于一对第1对准标记mb以及一对第2对准标记mc各自的摄像结果,控制由基板移动机构31以及压接工具34进行的部件5向基板3的压接。
[0204]
此外,在步骤s14中,如果判定位置关系不在允许范围内(步骤s14的否),则控制部2a禁止被压接工具34保持的部件5向基板3的压接(步骤s20)。此时,控制部2a可以使由冲裁部33b对部件5的冲裁停止。而且,控制部2a通知在部件供给部33的冲裁部33b中产生了不良情况(步骤s21)。例如,控制部2a通过使显示部2c显示通知该不良情况的产生的消息或警告等来通知该不良情况的产生。
[0205]
具体地,在由关系信息表示的距离不在预先决定的允许范围内的情况下,控制部2a通知在冲裁部33b中产生了不良情况。更具体地,在由关系信息表示的距离yl以及距离yr比允许范围短的情况下或比允许范围长的情况下,控制部2a通知不良情况的产生。此外,也可以在该距离yl以及距离yr之差不在允许范围内的情况下,控制部2a通知不良情况的产生。此外,也可以在由关系信息表示的距离xl以及距离xr中的任一者比允许范围短且另一者比允许范围长的情况下,控制部2a通知不良情况的产生。
[0206]
图16是示出图15的步骤s13中的位置关系确定处理的详细情况的流程图。
[0207]
控制部2a使第1相机39l以及第2相机39r分别对部件5进行摄像(步骤s131)。由此,由第1相机39l以及第2相机39r分别生成部件5的摄像数据。然后,控制部2a基于这些摄像数据,判定在第1相机39l的摄像范围dl以及第2相机39r的摄像范围dr各自内是否包含判定部件5的端缘和第2对准标记mc这两者(步骤s132)。
[0208]
在此,如果判定为在摄像范围dl以及摄像范围dr各自内包含部件5的端缘和第2对准标记mc这两者(步骤s132的是),则控制部2a生成上述的关系信息(步骤s133)。即,控制部2a确定在第1相机39l的摄像数据中拍摄到的部件5的端缘与第2对准标记mc的位置关系(xl,yl)。同样,控制部2a确定在第2相机39r的摄像数据中拍摄到的部件5的端缘与第2对准标记mc的位置关系(xr,yr)。然后,控制部2a生成表示确定出的该位置关系的关系信息(xl,yl),(xr,yr)。
[0209]
另一方面,如果判定为在摄像范围dl以及摄像范围dr各自内不包含部件5的端缘和第2对准标记mc这两者(步骤s132的否),则控制部2a使摄像移动机构38移动摄像范围dl以及摄像范围dr(步骤s134)。即,控制部2a使摄像移动机构38执行摄像范围dl以及摄像范围dr的移动,以使得被压接工具34保持的部件5的端缘分别进入摄像范围dl以及摄像范围dr。然后,控制部2a使第1相机39l以及第2相机39r各自将分别包含于摄像范围dl以及摄像范围dr的部件5的端缘作为被摄体来进行摄像(步骤s135)。由此,由第1相机39l以及第2相机39r各自生成拍摄到部件5的端缘的摄像数据。
[0210]
另外,在步骤s134中,第1相机39l以及第2相机39r各自可以一边摄像,一边持续执行它们的摄像范围的移动,直到部件5的端缘分别进入摄像范围dl以及摄像范围dr为止。在该情况下,同时执行步骤s134以及s135。此外,步骤s134的处理虽然在步骤s132中进行了否定的判定时立即执行,但也可以不立即执行。例如,在步骤s132中进行了否定的判定时,控制部2a通过控制摄像移动机构38来使摄像范围dl以及摄像范围dr移动,从而重复执行步骤s131以及s132的处理。而且,可以是即便在步骤s132中重复执行了预先决定的次数在该步骤s132中也未进行肯定的判定时执行步骤s134的处理。即,可以在不能使部件5的端缘和第
2对准标记mc这两者进入摄像范围dl以及摄像范围dr各自内的情况下,执行步骤s134的处理。此外,也可以在基于部件5、第1相机39l以及第2相机39r的规格而预先得知不能同时对部件5的端缘和第2对准标记mc进行摄像的情况下,不进行步骤s131以及s132的处理而执行步骤s134的处理。
[0211]
接下来,控制部2a使摄像移动机构38移动摄像范围dl以及摄像范围dr(步骤s137)。即,控制部2a使摄像范围dl以及摄像范围dr移动,以使得部件5的第2对准标记mc分别进入摄像范围dl以及摄像范围dr。换言之,控制部2a在一对第2对准标记mc未分别包含于摄像范围dl以及摄像范围dr内的情况下,在对部件5的端缘进行摄像后,使摄像移动机构38执行摄像范围dl以及摄像范围dr的移动,以使得一对第2对准标记mc分别进入摄像范围dl以及摄像范围dr。然后,控制部2a使第1相机39l以及第2相机39r将分别包含于摄像范围dl以及摄像范围dr的第2对准标记mc作为被摄体来进行摄像(步骤s138)。由此,由第1相机39l以及第2相机39r各自生成拍摄到第2对准标记mc的摄像数据。
[0212]
另外,在步骤s137中,第1相机39l以及第2相机39r各自也可以一边摄像,一边持续执行它们的摄像范围的移动,直到第2对准标记mc分别进入摄像范围dl以及摄像范围dr为止。在该情况下,同时执行步骤s137以及s138。
[0213]
在步骤s138的摄像后,控制部2a生成上述的关系信息(步骤s133)。此时,控制部2a使用在步骤s135中生成的拍摄到部件5的端缘的摄像数据和在步骤s138中生成的拍摄到第2对准标记mc的摄像数据。例如,控制部2a识别由第1相机39l在步骤s135中生成的摄像数据中拍摄到的部件5的端缘的位置,即识别摄像范围dl中的端缘的位置。进一步地,控制部2a识别由第1相机39l在步骤s137中生成的摄像数据中拍摄到的第2对准标记mc的位置,即识别摄像范围dl中的第2对准标记mc的位置。然后,控制部2a基于识别到的该部件5的端缘的位置、第2对准标记mc的位置和在步骤s137中移动的摄像范围dl的移动距离以及移动方向,确定部件5的端缘与第2对准标记mc的位置关系。
[0214]
如此,在步骤s133中,控制部2a基于部件5的端缘以及第2对准标记mc各自的摄像结果,生成并输出表示部件5的端缘与第2对准标记mc的位置关系的关系信息。在步骤s133中生成的关系信息例如用于由冲裁部33b对部件5的冲裁的位置的反馈控制或冲裁部33b的不良情况的通知等。
[0215]
如以上那样,在本实施方式中,不需要在冲裁部33b设置部件5的冲裁状态确认用的传感器,能够抑制该冲裁部33b的大型化。即,在本实施方式中的部件压接装置100中,能够将摄像部39用作部件5的冲裁状态确认用的传感器,因而能够抑制冲裁部33b的大型化。具体地,摄像部39用于控制由基板移动机构31以及压接工具34进行的部件5向基板3的压接。例如在用于控制部件5与基板3的位置对齐的第1对准标记mb以及第2对准标记mc的摄像中使用摄像部39。在本实施方式中的部件压接装置100中,通过使这样的摄像部39也对部件5的端缘进行摄像,并进行关系信息的生成以及输出,从而能够将该摄像部39用作部件5的冲裁状态确认用的传感器。因此,可以不特地在冲裁部33b设置部件5的冲裁状态确认用的传感器,因而能够抑制冲裁部33b的大型化。
[0216]
在此,为了确认部件5的冲裁状态,需要分别对部件5的端缘和第2对准标记mc进行摄像,但在不能对它们同时进行摄像的情况下,需要使摄像范围dl以及摄像范围dr移动而对它们单独地进行摄像。在这样的情况下,例如,设想先对第2对准标记mc进行摄像,之后移
动摄像范围dl以及摄像范围dr来对部件5的端缘进行摄像的步骤。然而,在该步骤中,为了接下来进行的部件5与基板3的位置对齐,必须进一步使摄像范围dl以及摄像范围dr移动而回到原位置。在该位置对齐中,需要第1对准标记mb的摄像。而且,在第1对准标记mb的摄像和第2对准标记mc的摄像中,为了确保该位置对齐的精度,期望摄像范围dl以及摄像范围dr分别位于相同位置。然而,如果即便使摄像范围dl以及摄像范围dr各自回到原位置该位置的再现性也不充分,则部件5与基板3的位置对齐的精度下降。
[0217]
然而,在本实施方式中的部件压接装置100中,在不能对部件5的端缘和第2对准标记mc同时进行摄像的情况下,先对部件5的端缘进行摄像,接下来对第2对准标记mc进行摄像。
[0218]
图17是用于说明本实施方式的部件压接装置100中的摄像部39以及摄像范围移动的时机的图。
[0219]
如图17所示,在本实施方式中的部件压接装置100中,先对部件5的端缘进行摄像,接下来对第2对准标记mc进行摄像。在它们的摄像期间,第1相机39l以及第2相机39r即摄像范围dl以及摄像范围dr移动。然而,在该第2对准标记mc的摄像和第1对准标记mb的摄像期间,不使第1相机39l以及第2相机39r移动就能够进行作为部件5与基板3的位置对齐的工作台37的位置调整。这是因为,部件5的端缘比第2对准标记mc先被摄像。即,在本实施方式中,能够在不使进行第2对准标记mc的摄像的摄像范围dl以及摄像范围dr移动的情况下对第1对准标记mb进行摄像。具体地,不使摄像范围dl以及摄像范围dr移动,能够通过使基板3移动而使基板3的第1对准标记mb进入它们的摄像范围,以对该第1对准标记mb进行摄像。因此,在第1对准标记mb的摄像和第2对准标记mc的摄像中,摄像范围dl以及摄像范围dr各自的位置相等。因此,能够充分地确保部件5与基板3的位置对齐的精度。即,能够实现安装精度的提高。其结果,能够在抑制冲裁部33b的大型化的同时确认部件5的冲裁状态,并且能够实现安装精度的提高。
[0220]
此外,本实施方式中的控制部2a通过关系信息的输出来控制由冲裁部33b进行的从带构件70的部件5的冲裁。由此,能够将部件5的端缘与第2对准标记mc的位置关系自动地保持为固定,能够简单地实现部件5的冲裁精度的提高。
[0221]
此外,本实施方式中的控制部2a生成将部件5的端缘与第2对准标记mc之间的距离作为位置关系来表示的关系信息,在该距离比阈值长的情况下,通知在冲裁部33b中产生了不良情况。由此,能够针对作业者促使冲裁部33b的检查以及修理,从而提高冲裁精度。
[0222]
(变形例)
[0223]
在上述实施方式中,摄像移动机构38能够使第1相机39l以及第2相机39r移动来使摄像范围dl以及摄像范围dr移动。然而,摄像移动机构38也可以在不使第1相机39l以及第2相机39r移动的情况下使摄像范围dl以及摄像范围dr移动。
[0224]
图18是示出本变形例中的摄像移动机构38的一部分的结构例的图。
[0225]
如图18的(a)以及(b)所示,本变形例中的摄像移动机构38具备由透镜或反射镜等构成的光学构件38a。摄像移动机构38不使第1相机39l以及第2相机39r移动,而是例如如图18的(a)所示使光学构件38a向上方移动。由此,摄像范围dl以及摄像范围dr向x轴方向移动,使得相机间距扩大。或者,摄像移动机构38不使第1相机39l以及第2相机39r移动,而是例如如图18的(b)所示使光学构件38a向下方移动。由此,摄像范围dl以及摄像范围dr向x轴
方向移动,使得相机间距缩窄。
[0226]
如此,在本变形例中,通过光学构件38a的移动,能够使摄像范围dl以及摄像范围dr沿着x轴方向同时且简单地移动。
[0227]
(其他变形例)
[0228]
以上,对于一个或多个方式涉及的部件压接装置,基于上述实施方式以及该变形例进行了说明,但本公开并不限定于该实施方式以及变形例。只要不脱离本公开的主旨,将本领域技术人员想到的各种变形施于上述实施方式以及该变形例而得到的方式、对上述实施方式以及该变形例中的构成要素进行组合而构建的方式也可以包含于本公开的范围内。
[0229]
例如,在上述实施方式以及该变形例中,第1对准标记mb以及第2对准标记mc各自的形状为十字状,但并不限定于该形状,也可以是其他形状。
[0230]
此外,在上述实施方式以及该变形例中,基板3为显示器面板,在该显示器面板预压接以及正式压接部件5,但基板3也可以是显示器面板以外的基板。
[0231]
此外,在上述实施方式以及该变形例中,在对第2对准标记mc进行摄像之后对第1对准标记mb进行摄像。然而,也可以对第1对准标记mb和第2对准标记mc同时进行摄像。
[0232]
此外,在上述实施方式以及该变形例中,控制部2a通过使显示部2c显示通知不良情况的产生的消息或警告等,通知冲裁部33b的不良情况的产生。此时,控制部2a也可以使显示部2c显示关系信息所表示的距离xl、距离xr、距离yl以及距离yr,还可以使显示部2c显示用于根据它们的距离来调整冲裁部33b的数值。
[0233]
此外,在上述实施方式以及该变形例中,计算机2的构成要素的全部或一部分也可以由专用的硬件构成,或者也可以通过执行适于各构成要素的软件程序来实现。各构成要素也可以通过cpu(central processing unit,中央处理单元)或处理器等程序执行部读取并执行记录在hdd(hard disk drive,硬盘驱动器)或半导体存储器等记录介质的软件程序来实现。例如,程序执行部使预压接部30执行图15以及图16所示的流程图中包含的各步骤。
[0234]
此外,计算机2的构成要素可以由1个或多个电子电路构成。1个或多个电子电路分别既可以是通用的电路,也可以是专用的电路。在1个或多个电子电路中,例如可以包含半导体装置、ic(integrated circuit,集成电路)或lsi(large scale integration,大规模集成电路)。ic或lsi既可以集成于1个芯片,也可以集成于多个芯片。在此,虽然称为ic或lsi,但称呼根据集成的程度而改变,也可能被称为系统lsi、vlsi(very large scale integration,超大规模集成电路)或ulsi(ultra large scale integration,特大规模集成电路)。此外,在制造lsi后编程的fpga(field programmable gate array,现场可编程门阵列)也能够出于相同目的而使用。
[0235]
产业上的可利用性
[0236]
本公开例如能够用于在显示器面板安装部件的部件安装线等具有的部件压接装置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。