1.本发明属于液压系统领域,具体涉及一种用于电液伺服六自由度并联机器人的多裕度泵阀联合液压系统。
背景技术:
2.六自由度并联机器人是指机器人定平台和动平台通过多个运动支链相连接,具有六个自由度,且以并联方式驱动的一种闭环机器人。相较于串联机器人而言,六自由度并联机器人具有承载能力高、刚度大、结构稳定、末端灵活性高等优势,可以对刚体在空间的位置姿态进行完全的精准控制,从而可对被研究对象开展在任意位姿状态下的性能测试。目前该类机器人已广泛应用于运载火箭燃料自动加注装置、航天产品舱段对接、道路模拟器等,对我国航空航天应用、武器研究等领域具有重要意义。考虑到重载情况下电驱技术存在承载力不足、滚珠丝杠易卡滞的问题,目前高精度重载工况下六自由度并联机器人大多采用电液伺服系统进行运动控制。电液伺服六自由度并联机器人主要由静平台、动平台及六根伺服缸组成。六根伺服缸并联布置,通过球铰、虎克铰或万向节的方式连接动静平台。在实际作业过程中,一般由视觉测量系统实时反馈目标点与机器人动平台相对位置关系,接着由运动规划器解算出各伺服缸的空间运动曲线。通过建立高精度电液伺服控制策略实现单缸期望位移速度跟踪,从而保证电液伺服六自由度并联机器人完成目标主动跟随或期望空间位姿复现的任务。
3.在实际任务执行过程中,电液伺服并联机器人需要始终保证高可靠性,在预期任务区间内完成目标跟踪、位姿复现等功能。现有并联机器人电液伺服系统在常规作业状态下均可实现高效高精度对接,但由于其并未充分考虑到裕度设计和泵阀联合控制,主要存在有以下几点隐患:1)伺服电液系统对油液敏感度极高,一旦在位置跟踪时出现伺服阀阀芯卡滞或失效的问题,若该问题出现在阀芯关闭状态下,只需切换至预备的比例阀对伺服缸进行控制。但若该问题出现在阀芯打开状态下,将导致伺服阀回路无法及时切断,此时切换至比例阀会出现两阀共同控制单伺服缸,导致机器人失控;2)同理,当比例阀出现失效时,需切换至预备的电磁换向阀对伺服缸进行控制,但现有电液伺服系统并未考虑到及时切断比例阀油路;3)当伺服阀和比例阀均失效后,系统无法通过电磁换向阀对伺服缸进行毫米级的运动控制,只能中止任务并回收机器人。一旦上述隐患出现在单伺服缸跟踪空间位移、速度曲线的工况下,将会引起电液伺服并联机器人出现卡滞、动作紊乱等问题,不仅无法保证系统达到预期运动控制精度进而导致任务失败,甚至会危及到现场设施及人员安全。
技术实现要素:
4.为了克服现有技术中的问题,本发明提供了一种用于电液伺服六自由度并联机器人的多裕度泵阀联合液压系统。本发明可以理解为具备多套冗余控制方案的泵阀联合电液
伺服系统。本发明主要由静压支撑伺服缸、阀控模块和泵控模块组成。静压支撑伺服缸具备低摩擦、高定位精度的优势,是电液伺服六自由度并联机器人的执行元件。阀控模块为伺服阀、比例阀和电磁换向阀并联的冗余阀组,配合独立控制的开关阀实现油路无干扰切换,确保伺服缸工作稳定可靠性。泵控模块由变量泵和电机组成,保证在伺服阀和比例阀均失效的情况下系统依然可实现高精度运动控制。此外,系统配备有蓄能器,主要作用是平衡伺服电液系统的峰值流量并平稳各阀件的进出口压力。在电液伺服系统装配过程中,阀控模块、泵控模块及蓄能模组均布置在电液伺服六自由度并联机器人基座上,减少因体积占用和额外负载而降低静压支撑伺服缸动态响应特性,有效保证电液伺服六自由度并联机器人的空间运动范围。
5.本发明所描述的多裕度泵阀联合液压系统只是针对于六自由度并联机器人的单缸电液系统,实际上六自由度并联机器人共有六根缸,若要实现六根缸的多裕度泵阀联合液压,则对应需要六套完全一样的本发明的多裕度泵阀联合液压系统。
6.本发明首先提供了一种用于电液伺服六自由度并联机器人的多裕度泵阀联合液压系统,其包括静压支撑伺服缸、阀控模块和泵控模块;
7.所述泵控模块包括油箱、低压过滤器、电机、高压变量泵、溢流阀、高压过滤器、泵站蓄能器、第一蓄能器、第二蓄能器;高压变量泵进油口经低压过滤器连接油箱,高压变量泵的出油口经溢流阀连接油箱;所述的高压变量泵的出油口经高压过滤器与阀控模块的进口油路连接,过滤器与进口油路之间的油路上顺次设置有泵站蓄能器和第二蓄能器;所述阀控模块的出口油路与油箱连接,出口油路上设置有第一蓄能器;
8.所述阀控模块包括进口油路、出口油路、伺服阀、比例阀、第一三位四通换向阀、第二三位四通换向阀、第一二位四通换向阀、第二二位四通换向阀、第三二位四通换向阀、第四二位四通换向阀;
9.进口油路分别与伺服阀、比例阀、第一三位四通换向阀、第二三位四通换向阀的进油口连接,出口油路分别与伺服阀、比例阀、第一三位四通换向阀、第二三位四通换向阀的回油口相连;
10.伺服阀的a口和b口分别与第一二位四通换向阀的p口和t口连接,比例阀的a口和b口分别与第二二位四通换向阀的p口和t口连接,第一三位四通换向阀的a口和b口分别与第三二位四通换向阀的p口和t口连接,第二三位四通换向阀的a口和b口分别与第四二位四通换向阀的p口和t口连接,
11.第一二位四通换向阀、第二二位四通换向阀、第三二位四通换向阀和第四二位四通换向阀的a口均通过油路与静压支撑伺服缸的一侧油腔连接,第一二位四通换向阀、第二二位四通换向阀、第三二位四通换向阀和第四二位四通换向阀的b口均通过油路与静压支撑伺服缸的另一侧油腔连接。
12.本发明提出的用于电液伺服六自由度并联机器人的多裕度泵阀联合液压系统兼顾了稳定性、可靠性和高精度,主要由阀控模块和泵控模块联合实现。该套多裕度泵阀联合液压系统的引入带来了以下几项优势:一是有效提升系统可靠性,即使在伺服阀因油液污染而失效后,静压支撑伺服缸依然可通过比例阀实现高精度控制;二是考虑到阀件失效形式可能发生在阀芯开启和关闭两种情形下,在伺服阀、比例阀和电磁换向阀后均增设负责油路切断的开关阀,避免仍有油液从失效阀的阀口进出,影响伺服缸高精度运动控制;三是
当伺服阀、比例阀均失效时,电液伺服系统切换为变量泵控制后依然可以实现高精度控制,避免因阀组失效导致的任务失败;四是配置蓄能器来平稳系统压力波动,提升系统工作稳定性的同时实现了节能。
13.本发明针对现有电液伺服六自由度并联机器人无法兼顾可靠性、稳定性及高精度的问题,设计泵阀联合的多裕度电液伺服系统。其中,阀控模块设计为可实现油路无干扰切换的多阀并联方案,联合泵控模块保证静压支撑伺服缸始终保持高精度运动控制状态。此外,本发明在多处设置有蓄能器,平稳管路压力波动,补偿泵站流量峰值,有效提升了系统工作稳定性,提高了能量利用率。综上所述,本发明在为实现高可靠性六自由度并联机器人的高精度电液伺服系统方面具有极大的应用潜力。
附图说明
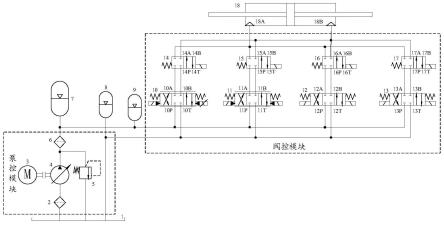
14.图1为本发明的用于电液伺服六自由度并联机器人的多裕度泵阀联合液压系统的总体结构示意图。
15.1-油箱,2-低压过滤器,3-电机,4-高压变量泵,5-溢流阀,6-高压过滤器,7-泵站蓄能器,8-第一蓄能器,9-第二蓄能器,10-伺服阀,11-比例阀,12-第一三位四通换向阀,13-第二三位四通换向阀,14-第一二位四通换向阀,15-第二二位四通换向阀,16-第三二位四通换向阀,17-第四二位四通换向阀,18-静压支撑伺服油缸。
具体实施方式
16.下面结合具体实施方式对本发明做进一步阐述和说明。所述实施例仅是本公开内容的示范且不圈定限制范围。本发明中各个实施方式的技术特征在没有相互冲突的前提下,均可进行相应组合。
17.如图1所示,本实施例的用于电液伺服六自由度并联机器人的多裕度泵阀联合液压系统,其包括静压支撑伺服缸、阀控模块和泵控模块;
18.所述泵控模块包括油箱1、低压过滤器2、电机3、高压变量泵4、溢流阀5、高压过滤器6、泵站蓄能器7、第一蓄能器8、第二蓄能器9;高压变量泵4进油口经低压过滤器2连接油箱1,高压变量泵4的出油口经溢流阀5连接油箱1;所述的高压变量泵4的出油口经高压过滤器6与阀控模块的进口油路连接,过滤器6与进口油路之间的油路上顺次设置有泵站蓄能器7和第二蓄能器9;所述阀控模块的出口油路与油箱1连接,出口油路上设置有第一蓄能器8;
19.所述阀控模块包括进口油路、出口油路、伺服阀10、比例阀11、第一三位四通换向阀12、第二三位四通换向阀13、第一二位四通换向阀14、第二二位四通换向阀15、第三二位四通换向阀16、第四二位四通换向阀17;
20.进口油路分别与伺服阀10、比例阀11、第一三位四通换向阀12、第二三位四通换向阀13的进油口连接,出口油路分别与伺服阀10、比例阀11、第一三位四通换向阀12、第二三位四通换向阀13的回油口相连;
21.伺服阀10的a口和b口分别与第一二位四通换向阀14的p口和t口连接,比例阀11的a口和b口分别与第二二位四通换向阀15的p口和t口连接,第一三位四通换向阀12的a口和b口分别与第三二位四通换向阀16的p口和t口连接,第二三位四通换向阀13的a口和b口分别与第四二位四通换向阀17的p口和t口连接;
22.第一二位四通换向阀14、第二二位四通换向阀15、第三二位四通换向阀16和第四二位四通换向阀17的a口均通过油路与静压支撑伺服缸的一侧油腔连接,第一二位四通换向阀14、第二二位四通换向阀15、第三二位四通换向阀16和第四二位四通换向阀17的b口均通过油路与静压支撑伺服缸的另一侧油腔连接。
23.本发明采用泵阀联合方案确保静压支撑伺服缸始终保持高精度运动控制状态,本发明在阀控模块进出口处布置蓄能器平稳压力波动,补偿泵站流量峰值。本发明同样适用于任意自由度并联机构的电液伺服系统,有效提升系统可靠性。
24.以下结合图1所示的系统对本发明的工作过程进行说明:
25.经过运动规划器解算得到各液压缸需要跟踪的位移速度曲线后,电液伺服系统开始工作。本发明以静压支撑伺服缸18向右运动为例说明系统工作原理。高压变量泵4进油口经低压过滤器2连接油箱1,高压变量泵4的出油口经溢流阀5连接油箱1。当系统以最大速度运动时,静压支撑伺服缸18所需流量较大,若只依赖于泵站流量将不利于系统稳定性,此时泵站蓄能器7会释放高压油液来补偿流量峰值,减少泵站能量消耗。在高压油进入阀控模块前,第二蓄能器9吸收管路中压力流量波动,提升阀件工作稳定性。
26.阀控模块部分伺服阀10首先作动,切换至右位(静压支撑伺服缸18向左运动时,切换至左位),而比例阀11、第一三位四通换向阀12和第二三位四通换向阀13均处于中位。同时,第一二位四通换向阀14切换至右位,第二二位四通换向阀15、第三二位四通换向阀16及第四二位四通换向阀17均处于左位。此时高压油从伺服阀10的10p口流入,从10a口流出。第一二位四通换向阀14的14p口与伺服阀10的10a连接,14a口与静压支撑伺服缸18a连接。此时系统为伺服阀控模式。静压支撑伺服缸右侧油腔的油液经从18b经第一二位四通换向阀14、伺服阀10和出口油路回油到油箱。
27.当伺服阀10由于油液污染导致阀芯卡滞或疲劳失效后,比例阀11切换至右位(静压支撑伺服缸18向左运动时,切换至左位),而第一三位四通换向阀12与第二三位四通换向阀13仍处于中位。但若伺服阀10失效是发生在阀芯打开时,则会导致比例阀11流量控制会受到伺服阀10的干扰,影响静压支撑伺服缸18的高精度运动控制。因此第一二位四通换向阀14切换左位,将伺服阀10所在阀路切断。第二二位四通换向阀15切换至右位,第三二位四通换向阀16和第四二位四通换向阀17仍处于左位。此时高压油从比例阀11的11p口流入,从11a口流出。第二二位四通换向阀15的15p口与比例阀11的11a口连接,15a口与静压支撑伺服缸18a连接。此时系统为比例阀控模式;静压支撑伺服缸右侧油腔的油液经从18b经第二二位四通换向阀15、比例阀11和出口油路回油到油箱。
28.当比例阀11疲劳失效后,第一三位四通换向阀12切换至右位(静压支撑伺服缸18向左运动时,切换至左位),而第二三位四通换向阀13仍处于中位。但若比例阀11失效是发生在阀芯打开时,则会导致通过第一三位四通换向阀12的流量会受到比例阀11的干扰,影响静压支撑伺服缸18的高精度运动控制。因此第二二位四通换向阀15切换左位,将比例阀11所在阀路切断。第三二位四通换向阀16切换至右位,第四二位四通换向阀17仍处于左位。此时高压油从第一三位四通换向阀12的12p口流入,从12a口流出。第三二位四通换向阀16的16p口与第一三位四通换向阀12的12a口连接,16a口与静压支撑伺服缸18a连接;静压支撑伺服缸右侧油腔的油液经从18b经第三二位四通换向阀16、第一三位四通换向阀12和出口油路回油到油箱。
29.当第一三位四通换向阀12疲劳失效后,第二三位四通换向阀13切换至右位(静压支撑伺服缸18向左运动时,切换至左位)。但若第一三位四通换向阀12失效是发生在阀芯打开时,则会导致通过第二三位四通换向阀13的流量会受到第一三位四通换向阀12的干扰。因此第三二位四通换向阀16切换左位,将第一三位四通换向阀12所在阀路切断。第四二位四通换向阀17切换至右位。此时高压油从第二三位四通换向阀13的13p口流入,从13a口流出。第四二位四通换向阀17的17p口与第二三位四通换向阀13的13a口连接,17a口与静压支撑伺服缸18a连接;静压支撑伺服缸右侧油腔的油液经从18b经第四二位四通换向阀17、第二三位四通换向阀13和出口油路回油到油箱。
30.由于第一三位四通换向阀12及第二三位四通换向阀13均无法实现流量调节,因此需要高压变量泵4根据流量需求实时调节泵排量,此时系统切换为泵控模式,保证静压支撑伺服缸18始终可以实现高精度运动控制。
31.回油管路与伺服阀10的10t口、比例阀11的11t口、第一三位四通换向阀12的12t口、第二三位四通换向阀13的13t口及第一蓄能器8连接。第一蓄能器8在电液伺服六自由度并联机器人高速运动的工况下可有效吸收压力波动,提高工作稳定性。
32.本发明通过油路并联、阀件串联的方式实现阀控模块的多冗余无干扰设计,搭配高精度泵控系统,保证即使在油液污染或阀件失效的情况下电液伺服六自由度并联机器人仍然可以实现精密运动控制。同时,本发明通过不同规格蓄能器来平稳油路波动,并补偿泵站流量峰值,有效提升系统作业稳定性,实现了节能。综上所述,本发明极大兼顾了电液伺服六自由度并联机器人可靠性、稳定性和高动态响应,为高效安全作业提供了巨大帮助。
33.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
