1.本发明涉及一种作业车辆的控制系统。
背景技术:
2.以往,在能够自主行驶的农用拖拉机等作业车辆中设定使作业车辆自主行驶的作业路径的情况下,已知一种利用特定作业车辆能够开始自主行驶的自主行驶候补路径的特定部设定候补特定用区域,能够将候补特定用区域中所含的作业路径特定为自主行驶候补路径的技术(例如,参照专利文献1)。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2018-147163号公报
技术实现要素:
6.发明所要解决的课题
7.然而,在如上所述的既往技术中,因为在预先确定了作业车辆开始自主行驶的位置(开始作业的位置,以下称为作业开始点)的情况下无法生成向作业开始点的适当的移动路径,所以不能实现移动到作业开始点时的高效化。即,在如上所述的以往技术中,对于提高作业效率的点有进一步改善的余地。
8.本发明鉴于以上问题而提出,目的在于提供一种能够实现向作业开始点的移动的高效化,能够提高作业效率的作业车辆的控制系统。
9.用于解决课题的方案
10.为了解决上述的课题,实现目的,实施方式提供一种作业车辆的控制系统,其特征在于,具备:行驶车身,其能够在田地内行驶;定位装置,其获取上述行驶车身的自身位置;方位角获取单元,其获取上述行驶车身的方位角;以及控制部,其生成包括上述田地内的作业开始点的作业路径,并控制上述行驶车身沿着生成的上述作业路径一边自主行驶一边进行作业,就上述控制部而言,预先设定上述行驶车身在上述田地内移动时的回转半径,基于以由上述方位角获取单元获取的上述方位角的矢量及由上述定位装置获取的上述自身位置相切的上述回转半径的圆、以上述作业路径的矢量及上述作业开始点相切的上述回转半径的圆、以及相对于两个上述回转半径的圆的切线,生成多个路径,将生成的上述多个路径中从上述自身位置到上述作业开始点之间最短的路径设定为基于自主行驶的移动路径。
11.发明的效果
12.根据实施方式的作业车辆,能够实现向作业开始点的移动的高效化,能够提高作业效率。
附图说明
13.图1是表示实施方式的作业车辆的概略左侧视图。
14.图2是表示实施方式的作业车辆的控制系统的块图。
15.图3是田地内的自主行驶的说明图(之一)。
16.图4是田地内的自主行驶的说明图(之二)。
17.图5是表示移动路径设定的处理的流程图(之一)。
18.图6是表示移动路径设定的处理的流程图(之二)。
19.图7是移动路径的路径模式的说明图。
20.图8中,(a)是左转-右转-左转的路径模式的说明图,(b)是右转-左转-右转的路径模式的说明图。
21.图9是便携终端装置的显示画面上的移动路径变更的说明图(之一)。
22.图10是便携终端装置的显示画面上的移动路径变更的说明图(之二)。
23.图11是便携终端装置的显示画面上的移动路径变更的说明图(之三)。
24.图12中,(a)是在原路径的右侧设定经由回转圆时的路径选择的说明图,(b)是在原路径的左侧设定经由回转圆时的路径选择的说明图,(c)是跨越原路径设定经由回转圆时的路径选择的说明图。
25.图13是经由回转圆的偏移设定的说明图(之一)。
26.图14是经由回转圆的偏移设定的说明图(之二)。
27.图中:1—作业车辆(拖拉机),2—行驶车身,3—前轮,4—后轮,5—引擎盖,6—作业机,7—pto装置,8—驾驶席,9—方向盘,10—手把杆,11—操作踏板,12—动力传递装置(传动箱),13—升降装置,61—耕作爪,71—pto轴,131—升降缸,132—提升臂,133—提升杆,134—下连杆,135—顶连杆,100—作业车辆的控制系统,110—引擎旋转传感器,111—车速传感器,112—变速传感器,113—偏角传感器,121—变速装置,122—转向装置,150—定位装置(gnss),160—便携终端装置(平板终端),161—显示画面(触摸面板画面),162—导向显示,163—设定完成按钮,170—方位角获取单元(方位角传感器),200—控制部,201—引擎ecu,202—行驶系统ecu,203—作业机升降系统ecu,ax—轴,a1—作业区域,a2—禁止脱离区域,a3—禁止进入区域,c1—回转半径的圆,c2—回转半径的圆,c3—连接圆,c4—经由回转圆,e—引擎,f1—田地,f2—田埂,h—操作员,l1—切线,p0—自身位置,p1—作业开始点,p2—作业结束点,p3—经由点,p1—顶点,r1—作业路径,r2—移动路径,s—导航卫星,v1—矢量,v2—矢量。
具体实施方式
28.以下,参照附图对本技术公开的作业车辆的控制系统的实施方式详细地进行说明。此外,该发明不被以下所示的实施方式限定。
29.<作业车辆(拖拉机)的概要>
30.首先,参照图1对实施方式的作业车辆1的概要进行说明。图1是表示实施方式的作业车辆1的概略左侧视图。此外,以下,作为作业车辆1,以拖拉机为例进行说明。另外,作为作业车辆的拖拉机1是一边自走一边在田地进行农事作业的农用拖拉机。
31.另外,作为作业车辆的拖拉机1除了供驾驶员(也称为操作员)搭乘,一边在田地内一边执行预定的作业之外,还通过以后述的控制部200(参照图2)为中心的控制系统进行的各部的控制,一边在田地内自主行驶,一边执行预定的作业。
32.此外,在以下的说明中,前后方向是拖拉机1直行时的行进方向,将行进方向的前方侧规定为“前”,将后方侧规定为“后”。拖拉机1的行进方向是在拖拉机1直行时从后述的驾驶席8朝向方向盘9的方向。
33.另外,左右方向是与前后方向水平地正交的方向。以下,朝向“前”侧规定左右。即,在驾驶员落座于驾驶席8且朝向前方的状态下,左手侧为“左”,右手侧为“右”。上下方向是铅垂方向。前后方向、左右方向以及上下方向相互三维正交。另外,在以下的说明中,有时将拖拉机1或行驶车身2称为“机体”。
34.如图1所示,拖拉机1具备行驶车身2和作业机6。行驶车身2能够在田地内行驶,具备前轮3和后轮4。前轮3为设为左右一对的操纵用的车轮(操纵轮)。后轮4是设为左右一对的驱动用的车轮(驱动轮)。此外,行驶车身2也可以取代车轮(前轮3及后轮4中的至少任一个)而具备履带装置。在该情况下,行驶履带是驱动轮。
35.在作为驱动轮的后轮4中,由容纳于引擎盖5内的驱动源即引擎e产生的旋转动力由设于动力传递装置(传动箱)12内的变速装置(变速器)121(参照图2)适当地减速而传递。后轮4被从引擎e传递的旋转动力驱动。变速装置121将从引擎e传递的旋转动力切换为多个(例如,一档~八档)档位中的任一档位。
36.行驶车身2构成为由引擎e产生且由变速装置121减速的动力经由4wd离合器也能够传递到前轮3。在该情况下,如果4wd离合器传递动力,则利用从引擎e传递的动力驱动前轮3及后轮4的四个轮子。另外,如果4wd离合器切断动力的传递,则利用从引擎e传递的动力仅驱动后轮4的两个轮子。这样,行驶车身2构成为能够切换二轮驱动(2wd)和四轮驱动(4wd)。
37.在行驶车身2的后部连结有在田地内进行作业的作业机6,且设有具有传递驱动作业机6的动力的pto(power take-off)轴71的pto装置7。在行驶车身2的中央部设有驾驶员驾驶拖拉机1时落座的驾驶席8。
38.在驾驶席8的前方设有用于操纵前轮3的手把即方向盘9。此外,方向盘9、驱动方向盘的驱动部等构成转向装置122(参照图2)。方向盘9设于手把杆10的上端部。在手把杆10的下方,也就是驾驶员落座于驾驶席8时的驾驶员地脚下附近设有各种操作踏板11(加速器踏板或制动踏板、离合器踏板)。
39.另外,在行驶车身2的后部设有使作业机6升降的升降装置13。升降装置13通过使作业机6上升将作业机6移动到非作业位置。另外,升降装置13通过使作业机6下降使作业机6移动到对地作业位置。升降装置13具备液压式的升降缸131、提升臂132、提升杆133、下连杆134以及顶连杆135。
40.就提升臂132而言,如果向升降缸131供给工作油,则绕轴ax转动,以使作业机6上升,如果从升降缸131排出工作油,则绕轴ax转动,以使作业机6下降。此外,在提升臂132的基部(轴ax附近)设有检测提升臂132的转动角度的提升臂传感器。作业机6的高度基于提升臂传感器的检测值而算出。
41.另外,提升臂132经由提升杆133与下连杆134连结。这样,升降装置13由下连杆134和顶连杆135连结为能够相对于行驶车身2升降作业机6。
42.此外,在图1所示的例子中,例示出作业机6是旋耕机的情况。旋耕机通过从pto装置7的pto轴71传递的动力旋转耕作爪61来翻耕田地表面(土壤)。
43.另外,拖拉机1具备控制部200(参照图2)。控制部200控制引擎e,并且控制行驶车身2的行驶速度。另外,控制部200控制作业机6。
44.另外,拖拉机1具备定位装置150。定位装置150设于行驶车身2的上部,以预定的周期测定行驶车身2的位置,获取行驶车身2的自身位置p0(参照图3)的信息(例如,纬度及经度)。定位装置150例如是gnss(global navigation satellite system),能够接收来自在上空环绕的导航卫星s的电波进行定位及计时。
45.另外,拖拉机1能够通过操作员进行的便携终端装置160的操作进行特定的田地中的各种作业的设定。便携终端装置160例如是平板终端,能够与互联网等通信网络连接,能够经由通信网络与作业管理装置相互连接。在该情况下,作业管理装置是能够进行所谓云计算的系统。便携终端装置160和作业管理装置例如由无线lan(local area network)连接。
46.便携终端装置160具备例如由硬盘、rom(read only memory)、ram(random access memory)等构成的存储部和由触摸面板构成的显示部及操作部。此外,也可以另外设置各种按键或按钮等作为操作部。另外,便携终端装置160也可以具备具有cpu(central processing unit)等的处理部,以与后述的控制部200同样地能够通过电子控制控制各部。
47.作业管理装置是设有具有cpu等的处理装置或rom(read only memory)、ram(random access memory)、hdd(hard disk drive)等存储装置、以及输入输出装置的计算机等。
48.另外,拖拉机1具备方位角获取单元170(参照图2)。方位角获取单元170获取行驶车身的方位角。方位角获取单元170例如是方位角传感器。以下,将方位角获取单元170称为方位角传感器。
49.方位角传感器170例如检测行驶车身2的行进方向的绝对方位角(例如,“将北”设为0
°
(360
°
),将“东”设为90
°
,将“南”设为180
°
,将“西”设为270
°
)。方位角传感器170每隔一定时间检测绝对方位角,将检测出的绝对方位角向控制部200等发送。此外,作为方位角获取单元170,除了方位角传感器之外,例如还有地磁传感器等。
50.<作业车辆(拖拉机)的控制系统>
51.接下来,参照图2对实施方式的作业车辆的控制系统100,即以控制部200为中心的作业车辆(拖拉机)1的控制系统进行说明。图2是表示实施方式的作业车辆的控制系统100的块图。如图2所示,控制部200具备引擎ecu(electronic control unit)201、行驶系统ecu202以及作业机升降系统ecu203。
52.引擎ecu201控制引擎e的转速。行驶系统ecu202通过控制驱动轮(后轮4)的旋转来控制行驶车身2(参照图1)的行驶速度。作业机升降系统ecu203控制升降装置13对作业机6进行升降驱动。
53.控制部200能够通过电子控制控制各部,以具有cpu(central processing unit)等的处理部为首,具备由存储各种程序或针对每块田地预先设定的行驶车身2的后述的预定行驶路径(以下,称为作业路径)r1等必要的数据类的例如硬盘、rom(read only memory)、ram(random access memory)等构成的存储部等。
54.如图2所示,在控制部200连接有定位装置(gnss)150、方位角传感器170、引擎旋转传感器110、车速传感器111、变速传感器112以及偏角传感器113等。另外,在控制部200连接
有引擎e、变速装置121、转向装置122以及升降装置13等。
55.引擎旋转传感器110检测引擎e的转速。车速传感器111检测行驶车身2(参照图1)的行驶速度(车速)。变速传感器112检测在变速装置121中是多个档位中的哪个档位。偏角传感器113检测作为操纵轮的前轮3(参照图1)的偏角。
56.分别地,从定位装置150向控制部200输入田地等中的行驶车身2的位置(自身位置)信息,从引擎旋转传感器110向控制部200输入引擎e的转速,从车速传感器111向控制部200输入行驶车身2的车速,从变速传感器112向控制部200输入挡墙的档位,从偏角传感器113向控制部200输入前轮3的偏角。此外,控制部200在使行驶车身2自主行驶的情况下,如上所述使用偏角传感器113的检测值,在反馈前轮3的偏角的同时控制与方向盘9(参照图1)连结的转向缸,由此操纵方向盘9。
57.另外,在控制部200,引擎ecu101与引擎e连接,行驶系统ecu102与变速装置121或转向装置122连接,作业机升降系统ecu103与升降装置13连接。此外,作业机升降系统ecu103经由升降装置13使作业机升降。
58.另外,在控制部200,在使行驶车身2自主行驶的情况下,预先针对每块田地确定与作业机6进行的作业内容相应的作业路径r1(参照图3),并将其数据化存储于存储部。控制部200基于定位装置150的测定结果,控制引擎e、变速装置121、转向装置122、升降装置13等,以沿着存储于存储部的作业路径r1一边行驶一边进行作业。作业路径r1根据田地的形状、大小、形成于田地内的垄的宽度、长度及个数、以及作物的种类等而设定。另外,控制部200预先设定拖拉机1(行驶车身2)在田地内移动时的回转半径。
59.另外,如上所述,控制部200例如与操作员能够随身携带的便携终端装置(平板终端)160无线连接。控制部200基于操作员的操作形成的来自便携终端装置160的指示信号控制拖拉机1的各部。此外,控制部200也可以构成为具有拖拉机1的机体信息数据库,从便携终端装置160等进行型号等信息的传递。
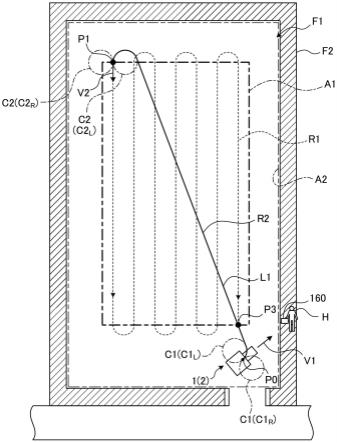
60.<田地内的自主行驶>
61.接下来,参照图3~图8对作业车辆(拖拉机)1的田地f1内的自主行驶进行说明。图3及图4是田地f1内的自主行驶的说明图,是从田地的上方开始的示意图。此外,在图3中示出行驶车身2开始移动时的回转半径地圆c1和进入作业路径r1时的回转半径地圆c2的距离为预定距离(例如,10m)以上的情况,在图4中示出行驶车身2开始移动时的回转半径的圆c1和进入作业路径r1时的回转半径地圆c2的距离小于预定距离的情况。
62.图5及图6是表示移动路径r2设定的处理的流程图。其中,在图6中示出从禁止脱离区域a2没有脱离的移动路径r2设定的处理。图7是移动路径r2的路径模式的说明图(表)。图8中,(a)是左转-右转-左转的路径模式的说明图,(b)是右转-左转-右转的路径模式的说明图。
63.例如,在拖拉机1进行的一边自主行驶一边进行作业的耕耘作业的情况下,控制部200(参照图2)基于包括例如拖拉机1的全长、全宽、轮距、作业机6(参照图1)的能力、田地f1的形状或面积等的信息等,生成规定适当的回转位置或耕深等的作业路径r1。
64.此外,操作员h也能够从田埂f2等操作便携终端装置160远程向拖拉机1发送指示。
65.如图3及图4所示,拖拉机1沿着作业路径r1从田地f1的出入口进入田地f1内,在设定于田地f1内的作业区域a1中适当地一边回转行驶一边自动进行耕耘作业。此外,拖拉机1
也能够根据程序在耕耘作业之后进行从田地f1的出入口驶出到田地f1外,停在预定的地点等控制。
66.拖拉机1(行驶车身2)例如从田埂f2的内侧,即田地f1的端将内侧的预定的区域设为枕地区域,在枕地区域环绕进行对地作业。拖拉机1在比枕地区域靠内侧的作业区域a1中沿着作业路径r1从预先设定的作业开始点p1到作业结束点p2重复直行和回转,同时进行对地(耕耘)作业。
67.<向作业开始点的移动路径设定>
68.另外,在本实施方式中,如图3及图4所示,设定拖拉机1(行驶车身2)的移动路径r2,以在拖拉机1开始作业的情况下能够按照适当的路径移动到作业开始点p1。
69.在该情况下,如图3及图4所示,控制部200设定以由方位角获取单元170获取的方位角的矢量v1和由定位装置150获取的自身位置p0相切的回转半径的圆c1,设定以作业路径r1的矢量v2和作业开始点p1相切的回转半径的圆c2。另外,控制部200设定相对于两个回转半径的圆c1、c2的切线l1。控制部200基于两个回转半径的圆c1、c2和切线l1生成多个路径。
70.在此,以方位角的矢量v1和自身位置p0相切的回转半径的圆c1有行驶车身2向左转开始移动的左转移动开始圆c1
l
和行驶车身2向右转开始移动的右转移动开始圆c1r这两个。另外,以作业路径r1的矢量v2和作业开始点p1相切的回转半径的圆c2有行驶车身2向左转进入作业路径r1的左转进入圆c2
l
和行驶车身2向右转进入作业路径r1的右转进入圆c2r这两个。
71.而且,控制部200选定行驶车身2侧的左右任一侧的回转半径的圆c1(c1
l
、c1r),选定作业开始点p1侧的左右任一侧的回转半径的圆c2(c2
l
、c2r),从这些多个(四个)路径中,将从自身位置p0到作业开始点p1之间最短的路径设定为移动路径r2。此外,控制部200将设定的移动路径r2显示于便携终端装置160的显示画面。
72.控制部200在设定移动路径r2的情况下,如图5所示,基于两个回转半径的圆c1、c2和切线l1生成多个路径(步骤s101)。
73.接着,控制部200从多个路径选定从自身位置p0到作业开始点p1之间最短的路径(步骤s102)。接着,控制部200将选定的最短的路径设定为移动路径r2(步骤s103),结束处理。
74.根据这样的结构,在拖拉机1的自主行驶中,顺畅地连接行驶车身2的自身位置p0和作业开始点p1,生成能够移动的路径,因为能够以生成的路径中最短的路径(移动路径)r2移动,所以能够实现向作业开始点p1的移动的高效化,能够顺畅地开始作业。由此,能够提高作业效率。
75.另外,如图3及图4所示,控制部200在作业区域a1的外侧设定禁止行驶车身2的脱离的禁止脱离区域a2。因此,行驶车身2能够在禁止脱离区域a2的内侧行驶(移动)。控制部200在多个路径中从自身位置p0到作业开始点p1之间最短的路径包括从禁止脱离区域a2脱离的部分路径的情况下,将包括部分路径的路径去除。即,在路径内包括来自禁止脱离区域a2的脱离成分(部分路径)的情况下将该路径去除。
76.而且,控制部200从将包括脱离成分的路径去除的剩余的路径将从自身位置p0到作业开始点p1之间最短的路径设定为移动路径r2。在该情况下,即使包括脱离成分的路径
是最短的路径,也不将这样的路径设定为移动路径r2。此外,第二短的路径在包括脱离成分的情况下,也不设定为移动路径r2。重复至不包括脱离成分的路径成为最短的路径。另外,控制部200在所有路径都包括脱离成分的情况下,不设定移动路径r2,例如,在便携终端装置160的显示画面显示不能设定移动路径r2。
77.控制部200在设定不从禁止脱离区域a2脱离的移动路径r2的情况下,如图6所示,基于两个回转半径的圆c1、c2和切线l1生成多个路径(步骤s201)。
78.接着,控制部200从多个路径选定从自身位置p0到作业开始点p1之间最短的路径(步骤s202)。接着,控制部200判定最短的路径是否包括从禁止脱离区域a2脱离的部分路径(步骤s203)。
79.控制部200在判定为最短的路径包括从禁止脱离区域a2脱离的部分路径的情况下(步骤s203:是),从包括脱离的部分路径的路径以外再次选定最短的路径,将再次选定的最短的路径设定为移动路径r2(步骤s204),结束处理。
80.另外,控制部200在判定为最短的路径不包括从禁止脱离区域a2脱离的部分路径的情况下(步骤s203:否),控制部200将选定的最短的路径设定为移动路径r2(步骤s103),结束处理。
81.根据这样的结构,因为能够防止从田地f1的脱离或与田埂f2的接触,同时以最短的路径(移动路径)r2移动,所以能够在确保安全的同时实现向作业开始点p1的移动的高效化。
82.另外,在此,参照图7及图8对行驶车身2开始移动时的回转半径的圆c1和进入作业路径r1时的回转半径的圆c2的距离小于预定距离的情况进一步说明。
83.如图7所示,在行驶车身2开始移动时的回转半径的圆c1和进入作业路径r1时的回转半径的圆c2的距离为预定距离以上的情况下,控制部200从左转-直行-左转的路径、左转-直行-右转的路径、右转-直行-左转的路径、右转-直行-右转的路径这四个路径模式中设定移动路径r2。
84.另外,在行驶车身2开始移动时的回转半径的圆c1和进入作业路径r1时的回转半径的圆c2的距离小于预定距离的情况下,控制部200在左转-直行-左转的路径、左转-直行-右转的路径、右转-直行-左转的路径、右转-直行-右转的路径这四个路径模式上增加左转-右转-左转的路径和右转-左转-右转的路径这两个路径模式,从中设定移动路径r2。
85.如图8(a)所示,控制部200在设定左转-右转-左转的路径的情况下,进一步设定与两个回转半径的圆c1、c2相切的回转半径的连接圆c3。另外,如图8(b)所示,控制部200在设定右转-左转-右转的路径的情况下,也进一步设定与两个回转半径的圆c1、c2相切的回转半径的连接圆c3。
86.根据这样的结构,因为即使在行驶车身2开始移动时的回转半径的圆c1和进入作业路径r1时的回转半径的圆c2的距离短的情况下,也能够设定最短路径的移动路径r2,所以能够实现向作业开始点p1的移动的高效化。
87.另外,操作员能够使用便携终端装置160,通过远程操作指示行驶车身2的移动开始。在该情况下,控制部200基于从便携终端装置160指示行驶车身2的移动开始的时刻,即控制部200从便携终端装置160接收移动开始的指示信号的时刻的自身位置p0和方位角设
定移动路径r2。而且,控制部200使行驶车身2沿着设定的移动路径r2移动。
88.根据这样的结构,因为能够在自从便携终端装置160存在移动开始的指示的地点,即控制部200从便携终端装置160接收移动开始的指示信号的地点到作业开始点p1之间设定合理的路径,所以能够实现向作业开始点p1的移动的高效化。
89.<移动路径的变更操作>
90.接下来,参照图9~图11对便携终端装置160的显示画面161上的移动路径r2的变更操作进行说明。图9~图11是便携终端装置160的显示画面161上的移动路径r2变更操作的说明图,表示显示画面160中的各操作的显示。
91.如上所述,便携终端装置160例如是平板终端。便携终端装置160预先具有行驶车身2在田地f1内移动时的回转半径的信息。另外,便携终端装置160与控制部200(参照图2)同样,能够生成向作业开始点p1的最短的路径即移动路径r2。便携终端装置160能够与便携终端装置160单体或者控制部200协作,执行包括移动路径r2的生成的各种处理。
92.即,便携终端装置160基于由方位角获取单元170(参照图2)获取的方位角的矢量v1、以由定位装置150(参照图2)获取的自身位置p0相切的回转半径的圆c1、以作业路径r1的矢量和作业开始点p1相切的回转半径的圆c2、以及相对于两个回转半径的圆c1、c2的切线l1(参照图3),生成从行驶车身2的自身位置p0到作业开始点p1的移动路径r2。
93.如图9所示,如果便携终端装置160通过操作员等的操作从便携终端装置160设定任意的经由点p3,则也基于回转半径的信息设定以经由点p3为中心的回转半径的经由回转圆c4。如果便携终端装置160设定经由回转圆c4,则能够将移动路径r2变更为经由经由回转圆c4的圆弧的路径。
94.在该情况下,操作员一边看显示于便携终端装置160的显示画面(例如,触摸面板画面)161的提示路径信息或点击的导向显示162,一边用手指等点击显示画面161上的所希望的位置(也是任意的位置),由此,变更为经由经由点p3(经由回转圆c4)的路径。此外,在显示画面161例如存在触摸面板(单点触控)方式,但例如也可以是能够通过同时点击多个位置进行复杂的操作的所谓多点触控方式。
95.此外,在显示画面161上,为了在禁止脱离区域a2的外侧示出田地f1(参照图3)和田埂f2(参照图3)的边界,也可以进一步显示田地区域。
96.另外,如图9所示,在作业区域a1的顶点p1设定有经由点p3及经由回转圆c4,以移动路径r2绕过作业区域a1的方式变更,但在当前时刻,移动路径r2包括从禁止脱离区域a2脱离的路径。即,图9所示的例子是在移动路径r2存在(脱离等的)不适当的部分的状态。因此,在显示画面161中,不能操作设定完成按钮163,以不能进行设定完成的操作。此外,在该情况下,还可以进行暗转显示等,使得设定完成按钮163不显眼。
97.如图10所示,如果通过操作员等的操作以不包括进入禁止脱离区域a3的路径的方式进一步设定任意的经由点p3,则追加设定以经由点p3为中心的回转半径的经由回转圆c4。如果便携终端装置160设定被追加的经由回转圆c4,则将移动路径r2变更为经由经由回转圆c4的圆弧的路径。在进一步变更的路径中,因为移动路径r2不包括从禁止脱离区域a2脱离的路径,所以能够设定移动路径r2。因此,在显示画面161中,能够操作设定完成按钮163。此外,在设定完成按钮163暗转的情况下,解除暗转显示,使得设定完成按钮163显眼。
98.就便携终端装置160而言,如果以方位角的矢量v1和自身位置p0相切的回转半径
的圆c1的圆弧(回转半径的圆c1的大小)变更,则以沿着回转半径的圆c1的变更后的圆弧的方式变更移动路径r2。另外,就便携终端装置160而言,如果以作业路径r1的矢量v2和作业开始点p1相切的回转半径的圆c2的圆弧(回转半径的圆c2的大小)变更,则以沿着回转半径的圆c2的变更后的圆弧的方式变更移动路径r2。
99.而且,如图11所示,就便携终端装置160而言,如果经由回转圆c4的圆弧(经由回转圆c4的大小)变更,则以沿着经由回转圆c4的变更后的圆弧的方式变更移动路径r2。
100.另外,因为便携终端装置160具有回转半径的最小值的信息,所以在回转半径的圆c1的圆弧、或回转半径的圆c2的圆弧、或经由回转圆c4的圆弧变更时,为了防止在行驶车身2移动时从移动路径r2脱离,禁止向最小值以下的回转半径(圆弧)的变更。便携终端装置160在低于回转半径的最小值的情况下,也可以构成为与变更的禁止一起在显示画面161显示(警告)超过容许范围。此外,在超过回转半径的最大值的情况下也可以构成进行同样的处理。
101.根据如上结构,在自主行驶中,将行驶车身2的自身位置p0和作业开始点p1顺畅地连接,生成可移动的路径,通过由操作员h从便携终端装置160设定可顺畅移动的任意的经由点p3,能够根据操作员h的要求设定移动路径r2,因此,能够实现向作业开始点p1移动的高效化。由此,能够提高作业效率。
102.另外,在因为不想由于行驶车身2的回转而破坏田地f1等而想使行驶车身2缓慢回转的情况下,通过变更回转半径,能够设定行驶车身2的可顺畅移动的任意的移动路径r2,高效地移动到作业开始点。
103.另外,如果设为最小值以下的回转半径,则在行驶车身2移动时可能从移动路径r2脱离,因此,通过禁止向最小值以下的回转半径的变更,能够在行驶车身2移动时防止从移动路径r2脱离,能够确保安全,并且实现向作业开始点p1移动的高效化。
104.参照图12,进一步对便携终端装置160的显示画面161上的移动路径r2的变更操作进行说明。图12中,(a)是在原路径的右侧设定了经由回转圆c4时的路径选择地说明图,(b)是在原路径的左侧设定了经由回转圆c4时的路径选择的说明图,(c)是跨越原路径设定了经由回转圆c4时的路径选择的说明图。
105.如图12(a)所示,便携终端装置160在设定的经由回转圆c4相对于变更前的移动路径r2最接近的部分处于右侧的情况下,以在经由回转圆c4向左回转的方式变更移动路径r2。另外,如图12(b)所示,便携终端装置160在设定的经由回转圆c4相对于变更前的移动路径r2最接近的部分处于左侧的情况下,以将经由回转圆c4向右回转的方式变更移动路径r2。
106.根据这样的结构,行驶车身2能够顺畅地行驶,在设定了经由回转圆c4的情况下能够不浪费且流畅地变更移动路径r2,因此,能够实现向作业开始点p1移动的高效化。
107.另外,如图12(c)所示,便携终端装置160在设定的经由回转圆c4跨越变更前的移动路径r2的情况下,将移动路径r2显示于显示画面161,以使操作员等选择在经由回转圆c4的圆弧上以向右回转的方式变更或者以向左回转的方式变更。
108.根据这样的结构,在设定的经由回转圆c4跨越变更前的移动路径r2的情况下,无论是向右回转还是向左回转,都能够不浪费且流畅地变更移动路径r2,因此,通过使操作员h选择,能够根据操作员h的要求设定任意的移动路径r2,能够实现向作业开始点p1移动的
高效化。
109.另外,便携终端装置160能够进行经由回转圆c4的偏移设定。图13及图14是经由回转圆c4的偏移设定的说明图。如图13所示,能够将经由回转圆c4向内侧或外侧偏移。例如,如果改变经由回转圆c4的大小而变更(变更为靠内或靠外)移动路径r2,则改变至行驶车身回转时的舵角(偏角)。因此,通过将经由回转圆c4偏移,能够固定舵角并变更移动路径r2。
110.另外,如图14所示,便携终端装置160在要求的经由回转圆c4低于行驶车身2的回转半径的最小值的情况下也将经由回转圆c4向内侧偏移。在为了避免与田埂f2(参照图3)的接触而想在角的靠内侧回转的情况下,如果缩小经由回转圆c4的圆弧,则可能低于最小值,但通过向内侧偏移,能够不低于最小值而将路径设定于内侧。
111.此外,偏移的经由回转圆c4优选位于将作业区域a1的顶点p1(参照图9)和田地区域的顶点连结的直线上。另外,偏移的经由回转圆c4优选处于将作业区域a1的顶点p1的内角二等分的位置。另外,对偏移量设定有上限。
112.另外,行驶车身2的回转半径也可以构成为以作业机6(参照图1)的左右宽度变更。另外,也可以构成在作业机6向田地区域外摆动而回转的情况、和作业机6在作业区域a1内回转的情况下变更回转半径的设定。
113.另外,也可以构成为根据前轮3(参照图1)的驱动,即前轮驱动设定变更回转半径。
114.另外,在便携终端装置160中,也能够将通过点击显示在显示画面161上的经由回转径c4等通过再次点击而取消。操作员能够自由进行这样的经由回转径c4的追加或取消。另外,在便携终端装置160中,在田地f1内设定有禁止行驶车身2的行驶的禁止进入区域的情况下,也能够生成不包括进入禁止进入区域的路径的移动路径r2。
115.通过上述的实施方式,实现以下的作业车辆的控制系统100。
116.(1)作业车辆的控制系统100具备:行驶车身2,其能够在田地f1内行驶;定位装置150,其获取行驶车身2的自身位置p0;方位角获取单元170,其获取行驶车身2的方位角;以及控制部200,其生成包括田地f内的作业开始点p1的作业路径r1,并控制行驶车身2沿着生成的作业路径r1一边自主行驶一边进行作业,就控制部200而言,预先具有行驶车身2在田地f1内移动时的回转半径的信息,基于以由方位角获取单元170获取的方位角的矢量v1及由定位装置150获取的自身位置p0相切的回转半径的圆c1、以作业路径r1的矢量v2及作业开始点p1相切的回转半径的圆c2、以及相对于两个回转半径的圆c1、c2的切线l,生成多个路径,将生成的多个路径中从自身位置p0到作业开始点p1之间最短的路径设定为基于自主行驶的移动路径r2。
117.根据这样的作业车辆的控制系统100,在自主行驶中,将行驶车身2的自身位置p0和作业开始点p1顺畅地连接,生成可移动的路径,因为能够以生成的路径中最短的路径(移动路径)r2移动,所以能够实现向作业开始点p1移动的高效化,能够顺畅地开始作业。由此,能够提高作业效率。
118.(2)作业车辆的控制系统100在上述(1)的基础上,其中,就控制部200而言,设定禁止行驶车身2的脱离的禁止脱离区域a2,在多个路径中从自身位置p0到作业开始点p1之间最短的路径包括从禁止脱离区域a2脱离的部分路径的情况下,将除去包括部分路径的路径之外的剩余路径中从自身位置p0到作业开始点p1之间最短的路径设定为移动路径r2。
119.根据这样的作业车辆的控制系统100,除了上述(1)的效果之外,还能够防止从田
地f1脱离或与田埂f2接触并且以最短的路径(移动路径)r2移动,因此,能够确保安全,同时实现向作业开始点p1移动的高效化。
120.(3)作业车辆的控制系统100在上述(1)或(2)的基础上,其中,以方位角的矢量v1及自身位置p0相切的回转半径的圆c1是行驶车身2以左转开始移动的左转移动开始圆c1
l
和行驶车身2以右转开始移动的右转移动开始圆c1r,以作业路径r1的矢量v2及作业开始点p1相切的回转半径的圆c2是行驶车身2以左转进入作业路径r1的左转进入圆c2
l
和行驶车身2以右转进入作业路径r1的右转进入圆c2r,就控制部200而言,在行驶车身2开始移动的圆c1和进入作业路径r1的圆c2的距离为预定距离以上的情况下,从左转-直行-左转的路径、左转-直行-右转的路径、右转-直行-左转的路径和右转-直行-右转的路径这四个路径中设定移动路径r2,在行驶车身2开始移动的圆c1和进入作业路径r1的圆c2的距离低于预定距离的情况下,进一步设定与行驶车身2开始移动的圆c1和进入作业路径r1的圆c2相切的回转半径的连接圆c3,在四个路径中增加左转-右转-左转的路径、右转-左转-右转的路径这两个路径而选定移动路径r2。
121.根据这样的作业车辆的控制系统100,除了上述(1)~(3)中任一项的效果之外,即使在行驶车身2开始移动的圆c1和进入作业路径r1的圆c2的距离短的情况下,也能够设定成为最短路径的移动路径r2,因此能够实现向作业开始点p1移动的高效化。
122.(4)作业车辆的控制系统100在上述(1)的基础上,其中,具备便携终端装置160,其预先具有行驶车身2在田地f1内移动时的回转半径的信息,就便携终端装置160而言,基于以由方位角获取单元170获取的方位角的矢量v1及由定位装置150获取的自身位置p0相切的回转半径的圆c1、以作业路径r1的矢量及作业开始点p1相切的回转半径的圆c2、以及相对于两个回转半径的圆c1、c2的切线l1,生成从行驶车身2的自身位置p0到作业开始点p1的移动路径r2,如果从便携终端装置160设定任意的经由点p3,则设定以经由点p3为中心的回转半径的经由回转圆c4,将移动路径r2变更为经由经由回转圆c4的圆弧的路径。
123.根据这样的作业车辆的控制系统100,除了上述(1)的效果之外,在自主行驶中,将行驶车身2的自身位置p0和作业开始点p1顺畅地连接,生成可移动的路径,通过由操作员h从便携终端装置160设定可顺畅移动的任意的经由点p3,能够根据操作员h的要求设定移动路径r2,因此,能够实现向作业开始点p1移动的高效化。由此,能够提高作业效率。
124.(5)作业车辆的控制系统100在上述(4)的基础上,其中,就便携终端装置160而言,如果以方位角的矢量v1及自身位置p0相切的回转半径的圆c1的圆弧、或以作业路径r1的矢量v2及作业开始点p1相切的回转半径的圆c2的圆弧、或经由回转圆c4的圆弧变更,则以沿着变更后的圆弧的方式变更移动路径r2。
125.根据这样的作业车辆的控制系统100,除了上述(4)的效果之外,在因为不想由于行驶车身2的回转而破坏田地f1等而想使行驶车身2缓慢地回转的情况下,通过变更回转半径,能够设定行驶车身2的可顺畅移动的任意的移动路径r2并高效地移动到作业开始点。由此,能够实现向作业开始点p1移动的高效化。
126.(6)作业车辆的控制系统100在上述(5)的基础上,其中,便携终端装置160具有回转半径的最小值的信息,禁止回转半径向最小值以下变更。
127.根据这样的作业车辆的控制系统100,除了上述(5)的效果之外,如果设为最小值以下的回转半径,则在行驶车身2移动时可能从移动路径r2脱离,但通过禁止回转半径向最
小值以下变更,能够在行驶车身2移动时防止从移动路径r2脱离,能够确保安全,同时实现向作业开始点p1移动的高效化。
128.(7)作业车辆的控制系统100在上述(4)~(6)中任一项的基础上,其中,就便携终端装置160而言,在设定的经由回转圆c4相对于变更前的移动路径r2最接近的部分处于右侧的情况下,以左回转经由回转圆c4的方式变更移动路径r2,在设定的经由回转圆c4相对于变更前的移动路径r2最接近的部分处于左侧的情况下,以右回转经由回转圆c4的方式变更移动路径r2。
129.根据这样的作业车辆的控制系统100,除了上述(4)~(6)中任一项的效果之外,因为在设定了经由回转圆c4的情况下能够不浪费且流畅地变更移动路径r2,所以能够实现向作业开始点p1移动的高效化。
130.(8)作业车辆的控制系统100在上述(4)~(7)中任一项的基础上,其中,就便携终端装置160而言,在设定的经由回转圆c4跨越变更前的移动路径r2的情况下,以选择将移动路径r2变更为在经由回转圆c4的圆弧上左回转还是右回转的方式进行显示。
131.根据这样的作业车辆的控制系统100,除了上述(4)~(7)中任一项的效果外,在设定的经由回转圆c4跨越变更前的移动路径r2的情况下,无论向左回转还是向右回转,都能不浪费且流畅地变更移动路径r2,因此,能够通过使操作员h选择而根据操作员h的喜好设定任意的移动路径r2,能够实现向作业开始点p1移动的高效化。
132.进一步的效果或变形例能够由本领域技术人员容易地导出。因此,本发明的更广泛的方案不限于如上所示且记述的特定的详情及代表性的实施方式。因此,在不脱离由附加的权利要求书及其等同物定义的总体发明的概念的精神或范围的情况下,能够进行各种变更。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。