技术特征:
1.一种作业车辆的控制系统,其特征在于,具备:行驶车身,其能够在田地内行驶;定位装置,其获取上述行驶车身的自身位置;方位角获取单元,其获取上述行驶车身的方位角;以及控制部,其生成包括上述田地内的作业开始点的作业路径,并控制上述行驶车身沿着生成的上述作业路径一边自主行驶一边进行作业,就上述控制部而言,预先具有上述行驶车身在上述田地内移动时的回转半径的信息,基于以由上述方位角获取单元获取的上述方位角的矢量及由上述定位装置获取的上述自身位置相切的上述回转半径的圆、以上述作业路径的矢量及上述作业开始点相切的上述回转半径的圆、以及相对于两个上述回转半径的圆的切线,生成从上述行驶车身的上述自身位置到上述作业开始点的移动路径,将生成的上述多个路径中从上述自身位置到上述作业开始点之间最短的路径设定为基于自主行驶的移动路径。2.根据权利要求1所述的作业车辆的控制系统,其特征在于,就上述控制部而言,设定禁止上述行驶车身的脱离的脱离禁止区域,在上述多个路径中在从上述自身位置到上述作业开始点之间最短的路径包括从上述脱离禁止区域脱离的部分路径的情况下,将除去包括上述部分路径的路径之外的剩余路径中从上述自身位置到上述作业开始点之间最短的路径设定为上述移动路径。3.根据权利要求1或2所述的作业车辆的控制系统,其特征在于,以上述方位角的矢量及上述自身位置相切的上述回转半径的圆是上述行驶车身以左转开始移动的左转移动开始圆和上述行驶车身以右转开始移动的右转移动开始圆,以上述作业路径的矢量及上述作业开始点相切的上述回转半径的圆是上述行驶车身以左转进入上述作业路径的左转进入圆和上述行驶车身以右转进入上述作业路径的右转进入圆,就上述控制部而言,在上述行驶车身开始移动的圆和进入上述作业路径的圆的距离为预定距离以上的情况下,从左转-直行-左转的路径、左转-直行-右转的路径、右转-直行-左转的路径和右转-直行-右转的路径这四个路径中设定上述移动路径,在上述行驶车身开始移动的圆和进入上述作业路径的圆的距离低于预定距离的情况下,进一步设定与上述行驶车身开始移动的圆和进入上述作业路径的圆相切的上述回转半径的连接圆,在上述四个路径中增加左转-右转-左转的路径、右转-左转-右转的路径这两个路径而选定上述移动路径。4.根据权利要求1所述的作业车辆的控制系统,其特征在于,具备便携终端装置,其预先具有上述行驶车身在上述田地内移动时的回转半径的信息,就上述便携终端装置而言,基于以由上述方位角获取单元获取的上述方位角的矢量及由上述定位装置获取的上述自身位置相切的上述回转半径的圆、以上述作业路径的矢量及上述作业开始点相切的上
述回转半径的圆、以及相对于两个上述回转半径的圆的切线,生成从上述行驶车身的上述自身位置到上述作业开始点的移动路径,如果从该便携终端装置设定任意的经由点,则设定以上述经由点为中心的上述回转半径的经由回转圆,将上述移动路径变更为经由上述经由回转圆的圆弧的路径。5.根据权利要求4所述的作业车辆的控制系统,其特征在于,就上述便携终端装置而言,如果以上述方位角的矢量及上述自身位置相切的上述回转半径的圆的圆弧、或以上述作业路径的矢量及上述作业开始点相切的上述回转半径的圆的圆弧、或上述经由回转圆的圆弧变更,则以沿着变更后的圆弧的方式变更上述移动路径。6.根据权利要求5所述的作业车辆的控制系统,其特征在于,上述便携终端装置具有上述回转半径的最小值的信息,禁止上述回转半径向上述最小值以下的变更。7.根据权利要求4~6中任一项所述的作业车辆的控制系统,其特征在于,就上述便携终端装置而言,在设定的上述经由回转圆相对于变更前的上述移动路径最接近的部分处于右侧的情况下,以左回转上述经由回转圆的方式变更上述移动路径,在设定的上述经由回转圆相对于变更前的上述移动路径最接近的部分处于左侧的情况下,以右回转上述经由回转圆的方式变更上述移动路径。8.根据权利要求4~7中任一项所述的作业车辆的控制系统,其特征在于,就上述便携终端装置而言,在设定的上述经由回转圆跨越变更前的上述移动路径的情况下,以选择将上述移动路径变更为在上述经由回转圆的圆弧上左回转还是右回转的方式进行显示。
技术总结
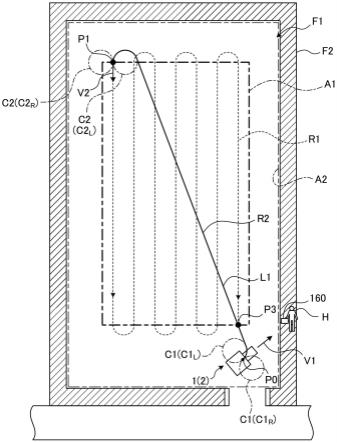
课题是实现向作业开始点的移动的高效化,提高作业效率。作业车辆的控制系统具备行驶车身、定位装置、方位角获取单元及控制部。行驶车身能够在田地内行驶。定位装置获取行驶车身的自身位置。方位角获取单元获取行驶车身的方位角。控制部生成包括田地内的作业开始点的作业路径,并控制行驶车身沿着生成的作业路径一边自主行驶一边进行作业。控制部预先设定行驶车身移动时的回转半径,基于以由方位角获取单元获取的方位角的矢量和由定位装置获取的自身位置相切的回转半径的圆、以作业路径的矢量和作业开始点相切的回转半径的圆、及相对于两个回转半径的圆的切线生成多个路径,将生成的多个路径中从自身位置到作业开始点之间最短的路径设定为移动路径。路径设定为移动路径。路径设定为移动路径。
技术研发人员:阿部匡良 楫野丰 山下智志 池田一生 有村浪漫 畑边昌也
受保护的技术使用者:井关农机株式会社
技术研发日:2021.12.09
技术公布日:2022/7/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。