1.本发明涉及坐标输入装置以及坐标计算方法。
背景技术:
2.在下述专利文献1中,公开了如下的技术,即,在通过静电电容方式来检测物体对接触面的接触的触摸面板中,检测超过阈值的静电电容值的分布区域,基于分布区域的形状,来决定是与接触面接触的物体为一个的单点触摸,还是与接触面接触的物体为多个的多点触摸。
3.在先技术文献
4.专利文献
5.专利文献1:日本特开2014-186530号公报
6.然而,在现有技术中,在进行了基于两个物体的多点触摸的情况下,在两个物体之间的距离比较长的情况和两个物体之间的距离比较短的情况的各个情况下,无法高精度地计算两个物体各自的坐标位置。
技术实现要素:
7.一个实施方式涉及的坐标输入装置,具备:多个检测电极,配置为格子状;坐标计算部,基于多个检测电极各自的静电电容的变化,来计算表示物体的接近位置的坐标;以及输出部,输出由坐标计算部计算出的坐标,坐标计算部通过第1计算方法和第2计算方法来分别计算坐标,其中,在该第1计算方法中,基于成为静电电容的变化的峰值的检测电极的位置来计算坐标,在该第2计算方法中,基于检测到静电电容的变化的多个检测电极的重心起具有给定的半径的圆的圆周上的静电电容值的周期性来计算坐标,输出部在第1计算方法以及第2计算方法双方中检测到两个物体的情况下,在两个物体之间的距离比给定的第1阈值大的情况下,输出通过第1计算方法计算出的坐标,在两个物体之间的距离比给定的第2阈值小的情况下,输出通过第2计算方法计算出的坐标。
8.发明效果
9.根据一个实施方式,能够在两个物体之间的距离比较长的情况和两个物体之间的距离比较短的情况的各个情况下,高精度地计算两个物体各自的坐标位置。
附图说明
10.图1是示出一个实施方式涉及的坐标输入装置的结构的框图。
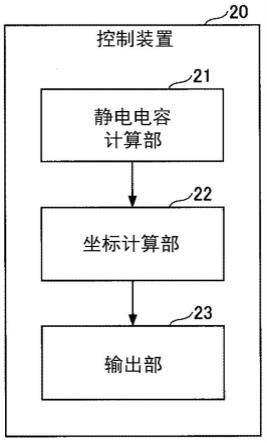
11.图2是示出一个实施方式涉及的控制装置的功能结构的框图。
12.图3是示出一个实施方式涉及的控制装置(坐标计算部)的坐标的计算例的图。
13.图4是示出一个实施方式涉及的坐标输入装置中的操作输入与静电电容的变化的关系的图。
14.图5是示出一个实施方式涉及的坐标输入装置中的操作输入与静电电容的变化的
关系的图。
15.图6是示出一个实施方式涉及的控制装置的处理的步骤的流程图
16.图7是示出一个实施方式涉及的控制装置(输出部)的输出模式的图。
17.图8是示出一个实施方式涉及的控制装置的处理的步骤的变形例的流程图。
18.图9是示出一个实施方式涉及的控制装置(输出部)的输出模式的变形例的图。
19.图10是示出一个实施方式涉及的坐标输入装置所带来的效果的比较例的图。
20.附图标记说明
21.10:坐标输入装置
22.10a:操作面
23.11:传感器基板
24.12:x轴电极
25.13:y轴电极
26.14:x轴侧检测部
27.15:y轴侧检测部
28.16:a/d变换部
29.17:存储部
30.19:接口部
31.20:控制装置
32.21:静电电容计算部
33.22:坐标计算部
34.23:输出部
35.30、30a、30b:手指
具体实施方式
36.以下,参照附图对本发明的一个实施方式进行说明。
37.图1是示出一个实施方式涉及的坐标输入装置10的结构的框图。图1所示的坐标输入装置10是能够进行操作者的手指30(“物体”的一个例子)对操作面10a(参照图3)的接近操作的装置,是能够通过静电电容方式(自电容检测方式或互电容检测方式)来检测操作者的手指30相对于操作面10a的接近位置的装置。
38.如图1所示,坐标输入装置10具备传感器基板11、x轴侧检测部14、y轴侧检测部15、a/d变换部16、存储部17、控制装置20以及接口部19。
39.传感器基板11重叠设置在操作面10a的背面侧。在传感器基板11以矩阵状并排设置有:为了检测x轴方向(图1的横向方向)的静电电容而在x轴方向上并排设置的多个x轴电极12;和为了检测y轴方向(图1的纵向方向)的静电电容而在y轴方向上并排设置的多个y轴电极13。
40.x轴侧检测部14检测多个x轴电极12各自的静电电容。此外,x轴侧检测部14输出表示检测到的多个x轴电极12各自的静电电容的检测信号(模拟信号)。
41.y轴侧检测部15检测多个y轴电极13各自的静电电容。此外,y轴侧检测部15输出表示检测到的多个y轴电极13各自的静电电容的检测信号(模拟信号)。
drive,固态驱动器)等)、通信接口等作为硬件结构。例如,图2所示的控制装置20的各功能部通过由处理器执行存储在存储介质的程序来实现。此外,a/d变换部16、存储部17以及接口部19中的至少一个也可以设置于控制装置20。
54.(基于顶点计算方法的坐标的计算例)
55.图3是示出一个实施方式涉及的控制装置20(坐标计算部22)的坐标的计算例的图。
56.在图3所示的例子中,在传感器基板11矩阵状且与操作面10a重叠地设置有15根x轴电极12(x0~x14)和15根y轴电极13(y0~y14)。此外,在图3所示的例子中,操作者的两根手指30a、30b对操作面10a进行接近操作。
57.如图3所示,在x轴方向上,在与手指30a重叠的x轴电极x4和与手指30b重叠的x轴电极x10分别产生静电电容的变化量的峰值。
58.此外,如图3所示,在y轴方向上,在与手指30a重叠的y轴电极y10和与手指30b重叠的y轴电极y4分别产生静电电容的变化量的峰值。
59.例如,坐标计算部22能够使用顶点计算方法,计算出经过x轴电极x4和其前后的x轴电极x3、x5的二次曲线c1的顶点位置的x轴坐标,作为表示手指30a的接近位置的x轴坐标。
60.同样地,坐标计算部22能够使用顶点计算方法,计算出经过x轴电极x10和其前后的x轴电极x9、x11的二次曲线c1的顶点位置的x轴坐标,作为表示手指30b的接近位置的x轴坐标。
61.同样地,坐标计算部22能够使用顶点计算方法,计算出经过y轴电极y10和其前后的y轴电极y9、y11的二次曲线c2的顶点位置的y轴坐标,作为表示手指30a的接近位置的y轴坐标。
62.同样地,坐标计算部22能够使用顶点计算方法,计算出经过y轴电极y4和其前后的y轴电极y3、y5的二次曲线c2的顶点位置的y轴坐标,作为表示手指30b的接近位置的y轴坐标。
63.例如,坐标计算部22能够分别针对x轴方向以及y轴方向,通过下述数式(1),将静电电容的变化量最大的电极设为峰值电极,来计算经过峰值电极中的静电电容的变化量x
pk
、比峰值电极靠前一个的检测电极中的静电电容的变化量x
pk-1
和比峰值电极靠后一个的检测电极中的静电电容的变化量x
pk 1
的二次曲线的顶点,作为表示操作者的手指30的接近位置的坐标xq。
64.[数式1]
[0065][0066]
其中,在上述数式(1)中,reso表示电极间分辨率。此外,x
ofs
表示峰值电极的坐标。
[0067]
(基于周期计算方法的坐标的计算例)
[0068]
以下,参照图4以及图5,对基于坐标计算部22的周期计算方法的坐标的计算例进行说明。
[0069]
首先,坐标计算部22基于由静电电容计算部21计算出的多个检测电极各自的静电
电容的变化,来计算重心坐标。
[0070]
接着,坐标计算部22计算以计算出的重心坐标为中心的具有给定的半径的测定圆的圆周上的各检测电极的交点处的静电电容的变化。
[0071]
然后,坐标计算部22判定计算出的各检测电极的交点处的静电电容的变化在沿着测定圆的一周中是否示出2周期的周期性。
[0072]
坐标计算部22在判定为“不示出2周期的周期性”的情况下,判断为“进行了基于操作者的一根手指30的输入操作”,输出上述重心坐标作为表示操作者的一根手指30的接近位置的坐标。
[0073]
另一方面,坐标计算部22在判定为“示出2周期的周期性”的情况下,判断为“进行了基于操作者的两根手指30的输入操作”,计算并输出表示操作者的两根手指30各自的接近位置的坐标。
[0074]
图4以及图5是示出一个实施方式涉及的坐标输入装置10中的操作输入与静电电容的变化的关系的图。图4表示如图4的(a)所示那样通过操作者的一根手指30对操作面10a进行了操作输入的情况。此外,图5表示如图5的(a)所示那样通过操作者的两根手指30对操作面10a进行了操作输入的情况。
[0075]
此外,图4的(b)以及图5的(b)示出操作面10a中的静电电容的变化量的平面分布。在图4的(b)以及图5的(b)中,用静电电容的变化量的等值线(实线的闭合曲线)示出静电电容的变化量的平面分布。此外,在图4的(b)以及图5的(b)中,用虚线示出具有给定的半径r的测定圆。此外,在图4的(b)以及图5的(b)中,用涂黑的圆示出操作者的手指30所接触的区域即手指区域fa。另外,在本实施方式中,与一般的手指30的尺寸匹配地将半径r设为了“9mm”,但是并不限于此。
[0076]
此外,图4的(c)以及图5的(c)示出差分值的角度特性。在图4的(c)以及图5的(c)中,横轴表示测定圆上的位置(相对于重心的角度),纵轴表示测定圆上的静电电容的变化量。
[0077]
例如,如图4的(a)所示,在通过操作者的一根手指30进行了操作输入的情况下,如图4的(b)所示,静电电容的变化量成为给定的阈值以上的手指区域fa为圆形,等值线也成为圆形。此外,成为测定圆的中心的重心成为一个手指区域fa的重心。在该情况下,测定圆上的各采样点处的静电电容的变化量相等,因此如图4的(c)所示,静电电容的变化量的角度特性成为平坦的特性。而且,在该情况下,坐标计算部22判断为“进行了基于操作者的一根手指30的输入操作”,输出上述重心坐标作为表示操作者的一根手指30的接近位置的坐标。
[0078]
此外,如图5的(a)所示,在通过操作者的两根手指30进行了操作输入的情况下,如图5的(b)所示,静电电容的变化量成为给定的阈值以上的手指区域fa为两个圆形,等值线成为椭圆形。关于该椭圆形的宽度,连结两根手指30的方向(x方向)侧宽,相差90度的方向(y方向)侧窄。此外,成为测定圆的中心的重心成为连结两个手指区域fa的重心彼此的直线的中间位置。在该情况下,在测定圆中,静电电容的变化量成为最大的点pmax产生两处,因此静电电容的变化量的角度特性如图5的(c)所示,在沿着测定圆的一周中,示出2周期的周期性。而且,在该情况下,坐标计算部22判断为“进行了基于操作者的两根手指30的输入操作”,计算并输出表示操作者的两根手指30各自的接近位置的坐标。
[0079]
例如,坐标计算部22能够通过周期计算方法,通过傅里叶级数展开求出测定圆(给定的半径r)中的静电电容的变化量的周期性,并基于使用该周期性的系数计算出的两根手指30各自距重心的距离、和使用该周期性的相位计算出的两根手指30各自从重心起的方向(连结两根手指30的直线相对于x轴所成的角度),来计算两根手指30各自的坐标。
[0080]
(控制装置20的处理的步骤)
[0081]
图6是示出一个实施方式涉及的控制装置20的处理的步骤的流程图。
[0082]
首先,静电电容计算部21基于从x轴侧检测部14以及y轴侧检测部15经由a/d变换部16供给的检测信号,来计算各检测电极的静电电容的变化量(步骤s601)。
[0083]
接着,坐标计算部22基于在步骤s601中计算出的各检测电极的静电电容的变化量,通过周期计算方法,计算表示操作者的手指30的接近位置的坐标(步骤s602)。
[0084]
接着,输出部23判断在步骤s602中是否通过周期计算方法检测到两根手指30(步骤s603)。
[0085]
在步骤s603中,在判断为未通过周期计算方法检测到两根手指30的情况(步骤s603:否)下,坐标计算部22基于在步骤s601中计算出的各检测电极的静电电容的变化量,通过顶点计算方法计算表示操作者的手指30的接近位置的坐标(步骤s606)。然后,输出部23输出在步骤s606中通过顶点计算方法计算出的坐标(步骤s607)。然后,控制装置20结束图6所示的一系列的处理。
[0086]
另一方面,在步骤s603中,在判断为通过周期计算方法检测到两根手指30的情况(步骤s603:是)下,输出部23判断在步骤s602中通过周期计算方法计算出的两个坐标间的距离是否小于“21mm”(步骤s604)。
[0087]
在步骤s604中,在判断为两个坐标间的距离不小于“21mm”的情况(步骤s604:否)下,坐标计算部22基于在步骤s601中计算出的各检测电极的静电电容的变化量,通过顶点计算方法来计算表示操作者的手指30的接近位置的坐标(步骤s606)。然后,输出部23输出在步骤s606中通过顶点计算方法计算出的坐标(步骤s607)。然后,控制装置20结束图6所示的一系列的处理。
[0088]
另一方面,在步骤s604中,在判断为两个坐标间的距离小于“21mm”的情况(步骤s604:是)下,输出部23输出在步骤s602中通过周期计算方法计算出的坐标(步骤s605)。然后,控制装置20结束图6所示的一系列的处理。
[0089]
(输出部23的输出模式)
[0090]
图7是示出一个实施方式涉及的控制装置20(输出部23)的输出模式的图。图7示出图6所示的一系列的处理的坐标的输出模式。
[0091]
如图7所示,输出部23在通过周期计算方法检测到一根手指30的情况下,输出通过顶点计算方法计算出的一根或两根手指30的坐标。
[0092]
此外,如图7所示,输出部23在通过周期计算方法检测到两根手指30且通过周期计算方法计算出的两个坐标间的距离为“21mm”以上的情况下,输出通过顶点计算方法计算出的两个坐标。
[0093]
另一方面,如图7所示,输出部23在通过周期计算方法检测到两根手指30且通过周期计算方法计算出的两个坐标间的距离小于“21mm”的情况下,输出通过周期计算方法计算出的两个坐标。
[0094]
此外,如图7所示,输出部23在通过周期计算方法检测到两根手指30且通过顶点检测方法检测到一根手指30的情况下,输出通过周期计算方法计算出的两个坐标。
[0095]
如以上说明的那样,一个实施方式涉及的坐标输入装置10具备:多个检测电极,被配置为格子状;坐标计算部22,基于多个检测电极各自的静电电容的变化,来计算表示操作者的手指30的接近位置的坐标;以及输出部23,输出由坐标计算部22计算出的坐标,坐标计算部22通过基于成为静电电容的变化的峰值的检测电极的位置计算坐标的顶点计算方法、和基于检测到静电电容的变化的多个检测电极的重心起具有给定的半径的圆的圆周上的静电电容值的周期性计算坐标的周期计算方法,来分别计算坐标,输出部23在顶点计算方法以及周期计算方法双方中检测到两根手指30的情况下,在两根手指30之间的距离比给定的第1阈值大的情况下,输出通过顶点计算方法计算出的坐标,在两根手指30之间的距离比给定的第2阈值小的情况下,输出通过周期计算方法计算出的坐标。
[0096]
由此,一个实施方式涉及的坐标输入装置10在两根手指30之间的距离比较长的情况下,输出通过顶点计算方法计算出的坐标,由此能够输出高精度的坐标。此外,一个实施方式涉及的坐标输入装置10在两根手指30之间的距离比较短的情况下,输出通过周期计算方法计算出的坐标,由此能够输出高精度的坐标。因此,根据一个实施方式涉及的坐标输入装置10,能够在两个物体之间的距离比较长的情况和两个物体之间的距离比较短的情况的各个情况下,高精度地计算两个物体各自的坐标位置。
[0097]
此外,在一个实施方式涉及的坐标输入装置10中,输出部23在顶点计算方法以及周期计算方法双方中检测到两根手指30的情况下,在通过周期计算方法检测到的两根手指30之间的距离比给定的第1阈值大的情况下,输出通过顶点计算方法计算出的坐标,在通过周期计算方法检测到的两根手指30之间的距离比给定的第2阈值小的情况下,输出通过周期计算方法计算出的坐标。
[0098]
由此,一个实施方式涉及的坐标输入装置10特别是在两根手指30之间的距离比第2阈值小的情况下,与顶点计算方法相比,周期计算方法能够更高精度地计算两根手指30的坐标,因此能够根据基于通过周期计算方法计算出的高精度的坐标的距离,来决定输出的坐标。
[0099]
此外,在一个实施方式涉及的坐标输入装置10中,坐标计算部22通过周期计算方法,通过傅里叶级数展开求出测定圆(给定的半径r)上的静电电容的变化量的周期性,并基于使用该周期性的系数计算出的两根手指30各自距重心的距离、和使用该周期性的相位计算出的两根手指30各自从重心起的方向,来计算两根手指30各自的坐标。
[0100]
由此,一个实施方式涉及的坐标输入装置10即使在两根手指30之间的距离比较短的情况下,也能够高精度地计算两根手指30各自的坐标。
[0101]
此外,在一个实施方式涉及的坐标输入装置10中,输出部23在未通过周期计算方法检测到两根手指30的情况(即,通过周期计算方法检测到一根手指30的情况)下,输出通过顶点计算方法计算出的坐标。
[0102]
由此,一个实施方式涉及的坐标输入装置10在进行了基于一根手指30的接近操作的情况下,能够通过顶点计算方法,高精度计算表示该一根手指30的接近位置的坐标。
[0103]
此外,在一个实施方式涉及的坐标输入装置10中,坐标计算部22通过顶点计算方法,来计算经过静电电容的变化量最大的峰值电极中的静电电容的变化量、比峰值电极靠
前一个的检测电极中的静电电容的变化量和比峰值电极靠后一个的检测电极中的静电电容的变化量的二次曲线的顶点,作为表示操作者的手指30的接近位置的坐标。
[0104]
由此,一个实施方式涉及的坐标输入装置10能够以比检测电极的间隔高的分辨率计算表示操作者的手指30的接近位置的坐标。
[0105]
(控制装置20处理的步骤的变形例)
[0106]
图8是示出一个实施方式涉及的控制装置20的处理的步骤的变形例的流程图。
[0107]
首先,静电电容计算部21基于从x轴侧检测部14以及y轴侧检测部15经由a/d变换部16供给的检测信号,来计算各检测电极的静电电容的变化量(步骤s801)。
[0108]
接着,坐标计算部22基于在步骤s801中计算出的各检测电极的静电电容的变化量,通过周期计算方法,来计算表示操作者的手指30的接近位置的坐标(步骤s802)。
[0109]
接着,输出部23判断在步骤s802中是否通过周期计算方法检测到两根手指30(步骤s803)。
[0110]
在步骤s803中,在判断为通过周期计算方法检测到两根手指30的情况(步骤s803:是)下,输出部23判断在步骤s802中通过周期计算方法计算出的两个坐标间的距离是否小于“21mm”(第1阈值)(步骤s804)。
[0111]
在步骤s804中,在判断为两个坐标间的距离小于“21mm”的情况(步骤s804:是)下,输出部23输出在步骤s802中通过周期计算方法计算出的坐标(步骤s805)。然后,控制装置20使处理返回到步骤s801。
[0112]
另一方面,在步骤s803中判断为未通过周期计算方法检测到两根手指30的情况(步骤s803:否)以及在步骤s804中判断为两个坐标间的距离不小于“21mm”的情况(步骤s804:否)下,控制装置20使处理进入步骤s806。
[0113]
在步骤s806中,坐标计算部22基于在步骤5801中计算出的各检测电极的静电电容的变化量,通过顶点计算方法来计算表示操作者的手指30的接近位置的坐标(步骤s806)。然后,输出部23输出在步骤s806中通过顶点计算方法计算出的坐标(步骤s807)。
[0114]
接下来,静电电容计算部21基于从x轴侧检测部14以及y轴侧检测部15经由a/d变换部16供给的检测信号,来计算各检测电极的静电电容的变化量(步骤s808)。
[0115]
接着,坐标计算部22基于在步骤s808中计算出的各检测电极的静电电容的变化量,通过周期计算方法来计算表示操作者的手指30的接近位置的坐标(步骤s809)。
[0116]
接着,输出部23判断是否在步骤s809中通过周期计算方法检测到两根手指30(步骤s810)。
[0117]
在步骤s810中,在判断为通过周期计算方法未检测到两根手指30的情况(步骤s810:否)下,控制装置20使处理返回到步骤s806。
[0118]
另一方面,在步骤s810中,在判断为通过周期计算方法检测到两根手指30的情况(步骤s810:是)下,输出部23判断在步骤s809中通过周期计算方法计算出的两个坐标间的距离是否比“20mm”(第2阈值)大(步骤s811)。
[0119]
在步骤s811中,在判断为两个坐标间的距离比“20mm”大的情况(步骤s811:是)下,控制装置20使处理返回到步骤s806。
[0120]
另一方面,在步骤s811中,在判断为两个坐标间的距离不大于“20mm”的情况(步骤s811:否)下,控制装置20使处理返回到步骤s805。
[0121]
(输出部23的输出模式的变形例)
[0122]
图9是示出一个实施方式涉及的控制装置20(输出部23)的输出模式的变形例的图。图9示出基于图8所示的一系列的处理的坐标的输出模式。
[0123]
如图9所示,输出部23在通过周期计算方法检测到一根手指30的情况下,输出通过顶点计算方法计算出的一根或两根手指30的坐标。
[0124]
此外,如图9所示,输出部23在通过周期计算方法检测到两根手指30且通过周期计算方法计算出的两个坐标间的距离为“21mm”(第1阈值)以上的情况下,输出通过顶点计算方法计算出的两个坐标。
[0125]
另一方面,如图9所示,输出部23在通过周期计算方法检测到两根手指30且通过周期计算方法计算出的两个坐标间的距离小于“20mm”(第2阈值)的情况下,输出通过周期计算方法计算出的两个坐标。
[0126]
此外,如图9所示,输出部23在通过周期计算方法检测到两根手指30且通过顶点检测方法检测到一根手指30的情况下,输出通过周期计算方法计算出的两个坐标。
[0127]
此外,如图9所示,输出部23在通过周期计算方法检测到两根手指30且通过周期计算方法计算出的两个坐标间的距离为“20mm”(第2阈值)以上小于“21mm”的情况下,输出通过与在之前刚进行的输出坐标的计算中使用的计算方法相同的计算方法计算出的两个坐标。
[0128]
(效果的比较例)
[0129]
图10是示出一个实施方式涉及的坐标输入装置10所带来的效果的比较例的图。图10的(a)示出图6所示的流程图以及图7所示的输出模式所带来的效果。图10的(b)示出图8所示的流程图以及图9所示的输出模式所带来的效果。
[0130]
在图10中,表示如下的例子,即,使用一个实施方式涉及的坐标输入装置10,根据操作面10a中的两根手指30之间的距离,进行使对象物的放大比率变化的放大操作。在图10的(a)以及图10的(b)中,纵轴表示放大操作的放大比率,横轴表示时间。另外,在图10的(a)以及图10的(b)中,期间s1表示将两根手指30之间的距离固定为相互接触的距离的期间(即,优选放大比率不变化的区间)。
[0131]
如图10的(b)所示,通过使第1阈值与第2阈值不同,与图10的(a)所示的使第1阈值与第2阈值相等的情况相比,更能够抑制将两根手指30之间的距离固定为相互接触的距离时的、由噪声的影响引起的放大操作的放大比率的变化。
[0132]
如以上说明的那样,在一个实施方式涉及的坐标输入装置10中,第1阈值也可以比第2阈值大,输出部23也可以在两根手指30之间的距离比第1阈值(在一个例子中为“21mm”)小且比第2阈值(在一个例子中为“20mm”)大的情况下,输出通过与在之前刚进行的输出坐标的计算中使用的计算方法相同的计算方法计算出的坐标。
[0133]
由此,一个实施方式涉及的坐标输入装置10能够在两根手指30之间的距离为第1阈值与第2阈值之间的情况下,抑制输出坐标的计算方法在周期计算方法与顶点计算方法之间频繁地切换。
[0134]
以上,对本发明的一个实施方式进行了详细叙述,但是本发明并不限定于这些实施方式,能够在权利要求书所记载的本发明的主旨的范围内,进行各种变形或变更。
[0135]
例如,在一个实施方式中,作为顶点计算方法,坐标计算部22计算静电电容的变化
量的峰值位置的坐标作为表示手指30的接近位置的坐标,但是并不限于此。例如,作为顶点计算方法,坐标计算部22也可以将静电电容的变化量为给定的阈值以上的区域的重心看作静电电容的变化量的峰值位置的坐标来进行计算,作为表示手指30的接近位置的坐标。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。