1.本发明涉及了一种足弓-足踝系统,具体涉及一种动态调节的柔性足弓-足踝系统及其控制方法。
背景技术:
2.人的足部是一个非常复杂的系统,它包含众多的骨、关节、肌肉、韧带、神经和血管。其中,足弓和踝关节在承受人体重量、吸收地面冲击、足底压力分布和保持平衡等方面起着非常重要作用,而人体正常步态长期承受过载,如长时间的站立或行走后,足弓可能会下降,引起足部的损伤或疼痛,继而出现步态失调甚至平足等足部疾病。
3.为了防止足弓过低,减小足弓下降带来的损伤,矫形鞋垫不断发展并得到应用。传统的矫形鞋垫通过在足弓区域增加一块刚性的凸起,可以保证穿戴者足弓的正常高度,如custom red(vasyli medical,labrador,australia)产品,但是这类刚性的被动式支撑会限制人体足部的自由度,有研究表明这类鞋垫会增加跑步的能量成本,并且长期的刚性挤压甚至会导致肌肉的废用性萎缩,同时,人体足弓结构随着身体年龄的变化也在发生着变化,因此长期定制矫形鞋垫成本很高。市场现有的airlift产品使用充气气囊置于足弓处,实现柔性的支撑,但气囊气压始终保持不变,仍属于固定式的被动支撑方式,而人体足在行走过程中的不同步态时期的足弓高度需要动态调节,比如在足接触地面的初期,足弓需要下降以吸收冲击,而在足向前推进时,足弓需要上升以提高足部整体的刚度,因此被动式的支撑不能适应人体足弓在行走过程中的动态变化。
4.为了克服现有的装置的设计缺陷,需要设计一种新型的、柔性的、能动态调节主动助力的足弓支撑鞋垫,不仅能用于医学上防止足弓塌陷和治疗平足症,还可用于人们日常户外活动的运动助力和平衡保持。
技术实现要素:
5.为了克服现有足部矫形装置的问题,本发明提供了一种动态调节的柔性足弓-足踝系统及其控制方法,可以通过足底压力传感器获取穿戴者当前的步态,根据人体不同的步态事件对足弓和踝关节进行动态的支撑助力;同时采用气动的柔性驱动器,实现了柔性的主动助力,解除了驱动器对人体足部自由度的限制。本发明主要包含以下三点创新性设计:
6.(1)基于仿生结构驱动器设计;
7.(2)完全的柔性结构(足弓-足踝系统);
8.(3)动态调节。
9.为实现上述目的,本发明采取以下技术方案:
10.一、一种动态调节的柔性足弓-足踝系统
11.系统包括左脚、右脚柔性足弓-足踝模块、气压源和传感控制模块,左脚、右脚柔性足弓-足踝模块均与传感控制模块电连接,左脚、右脚柔性足弓-足踝模块均与气压源相连,
气压源与传感控制模块连接;左脚、右脚柔性足弓-足踝模块的结构相同,柔性足弓-足踝模块包括鞋、柔性驱动器、电磁开关阀和气管;鞋穿着于穿戴者脚上,鞋与传感控制模块电连接,鞋内安装有柔性驱动器,柔性驱动器通过气管与对应的电磁开关阀相连,各个电磁开关阀通过气管与气压源相连,各个电磁开关阀均与传感控制模块电连接;传感控制模块通过控制各个电磁开关阀的开启和关闭来控制对应柔性驱动器所在气路的通断,进而控制各个柔性驱动器的状态,从而动态调节各个柔性驱动器对穿戴者的足弓和踝关节处的支撑力。
12.所述鞋包括鞋体、柔性鞋垫和足底压力传感器,鞋体内设置有柔性鞋垫,足底压力传感器设置在柔性鞋垫下的鞋体内,足底压力传感器通过导线连接至传感控制模块;
13.所述柔性驱动器包括1个足弓支撑驱动器与2个踝稳定驱动器,足弓支撑驱动器与2个踝稳定驱动器分别通过对应的气管与2个电磁开关阀相连,其中2个踝稳定驱动器与同一个电磁开关阀相连,足弓支撑驱动器设置于柔性鞋垫的上表面并与穿戴者的足弓贴合,使得足弓支撑驱动器对穿戴者的足弓进行支撑,2个踝稳定驱动器分别设置在鞋体的靠近脚跟的两内侧面上并与穿戴者的踝关节贴合,使得2个踝稳定驱动器对穿戴者的踝关节进行支撑。
14.所述柔性足弓-足踝模块中的电磁开关阀为两个,分别为足弓电磁开关阀和足踝电磁开关阀,足弓电磁开关阀和足踝电磁开关阀分别通过对应的气管与气压源连通。
15.所述气压源包括气压泵与稳压阀,气压泵与稳压阀相连,稳压阀通过气管与对应的电磁开关阀相连。
16.所述传感控制模块包括微控制器、电池、电压转化模块、4个气压传感器、场效应管开关模块;电池通过电压转化模块给气压源、微控制器、气压传感器和场效应管开关模块供电,微控制器通过导线与各个气压传感器连接,每个气压传感器通过气管与对应柔性驱动器连接,实时测量对应柔性驱动器的内部气压;场效应管开关模块通过导线与微控制器和各个电磁开关阀相连,微控制器通过向场效应管开关模块输出pwm波控制各个电磁开关阀的开启和关闭。
17.所述柔性驱动器是由具有热塑性聚氨酯的双层40d尼龙织物通过层压和热压密封工艺制造获得的。
18.所述足弓支撑驱动器的外形为弓形,踝稳定驱动器的外形为方形。
19.二、一种柔性足弓-足踝系统的控制方法
20.传感控制模块对穿戴者鞋内的各个足底压力传感器检测获得的压力信号进行分析后,获得穿戴者两只脚的步态事件,根据穿戴者两只脚的步态事件,传感控制模块通过控制对应的电磁开关阀来动态控制各个柔性驱动器的工作状态,具体地:
21.所述步态事件为接触初期、承重期、推进期或摆动期;接触初期、承重期、推进期和摆动期组成一个步态周期;
22.当穿戴者左脚步态处于接触初期、承重期时,传感控制模块通过对应的电磁开关阀的开启来控制左脚的踝稳定驱动器开启,用于为穿戴者的左脚踝关节提供支撑力;当穿戴者左脚步态处于推进期和摆动期时,传感控制模块通过对应的电磁开关阀的关闭来控制左脚的踝稳定驱动器关闭;
23.当穿戴者左脚步态处于承重期和推进期时,传感控制模块通过对应的电磁开关阀的开启来控制左脚的足弓支撑驱动器开启,用于为穿戴者的足弓提供支撑力;当穿戴者左
脚步态处于摆动期和接触初期时,传感控制模块通过对应的电磁开关阀的关闭来控制左脚的足弓支撑驱动器关闭;
24.当穿戴者右脚步态处于接触初期、承重期时,传感控制模块通过对应的电磁开关阀的开启来控制右脚的踝稳定驱动器开启,用于为穿戴者的脚踝提供支撑力;当穿戴者右脚步态处于推进期和摆动期时,传感控制模块通过对应的电磁开关阀的关闭来控制右脚的踝稳定驱动器关闭;
25.当穿戴者右脚步态处于承重期和推进期时,传感控制模块通过对应的电磁开关阀的开启来控制右脚的足弓支撑驱动器开启,用于为穿戴者的足弓提供支撑力;当穿戴者右脚步态处于摆动期和接触初期时,传感控制模块通过对应的电磁开关阀的关闭来控制右脚的足弓支撑驱动器关闭。
26.每个所述足底压力传感器检测获得第一跖骨位置的足底压力和足跟骨位置的足底压力并发送给传感控制模块,传感控制模块将跖骨足底压力与跟骨足底压力分别与对应的预设压力阈值进行比较,获得穿戴者两只脚的步态周期。
27.当所述跖骨足底压力小于或等于跖骨压力阈值且跟骨足底压力小于或等于跟骨压力阈值,则当前步态为摆动期;当跖骨足底压力小于等于跖骨压力阈值且跟骨足底压力大于跟骨压力阈值,则当前步态为接触初期;当跖骨足底压力大于跖骨压力阈值且跟骨足底压力大于跟骨压力阈值,则当前步态为承重期;当跖骨足底压力大于跖骨压力阈值且跟骨足底压力小于或等于跟骨压力阈值,则当前步态为推进期。
28.有必要说明的是,对于单只脚的步态周期的划分,本说明书采用的划分的具体描述如下:接触初期,指所描述的脚的脚跟恰好着地到脚掌完全贴地之间的阶段;承重期,指所描述的脚的脚掌恰好完全贴地到该脚脚跟即将离地之间的阶段;推进期,指所描述的脚的脚跟恰好抬起到脚尖即将离地之间的阶段;摆动期,指所描述的脚完全离地的阶段。
29.该柔性足弓-足踝系统使用附着在鞋子内里和鞋垫上的全柔性仿生驱动器,对穿戴者的足弓和踝关节进行支撑和助力,通过足底压力传感器获取穿戴者的步态信息,在穿戴者不同的步态阶段,两只脚的足弓支撑驱动器和踝稳定驱动器分别有规则地开启和关闭,柔性驱动器开启时对穿戴者进行助力,关闭后不影响穿戴者的足部自由度,以保障舒适度。穿戴该系统可以降低穿戴者的代谢成本和小腿肌肉的活跃度,同时可以提高运动能力,减轻疼痛感,可以防止负重行走后的足弓降低,以及矫正平足。整体系统集成为一个背包,具有很好的可携带性,可以用于户外活动。
30.与现有技术相比,本发明的有益效果是:
31.1、本发明设计了基于仿生结构的柔性驱动器,能够与穿戴者的足弓处紧密贴合,符合人体足弓的结构。
32.2、包括鞋体和柔性驱动器在内的整套穿戴系统使用了完全柔性的结构,进行支撑助力的同时,没有限制穿戴者足踝的自由度,不会对穿戴者的足部造成刚性挤压,同时舒适度也得到了提高。
33.3、使用了基于人体步态事件的动态调节主动助力的控制方法,适应了人体足弓和足踝在运动过程中的动态变化,仅在需要时进行支撑,可以起到正常的助力效果,减少穿戴者的运动能量消耗的同时还能有效防止穿戴者足部肌肉的废用性萎缩。
附图说明
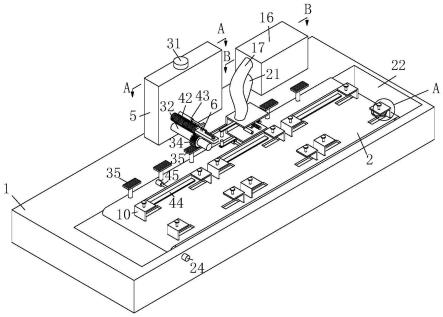
34.图1是本发明的总体结构图。
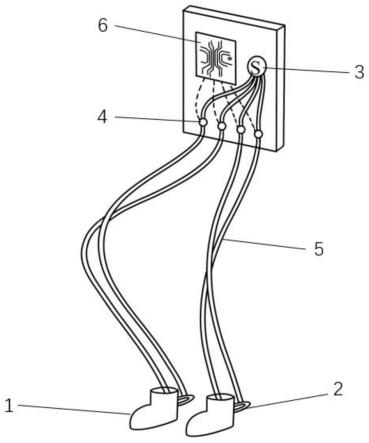
35.图2是本发明穿着于人体的示意图。
36.图3是本发明鞋内部柔性驱动器布局示意图。
37.图4是本发明传感控制模块示意图。
38.图5是本发明单个步态周期内的控制步骤图。
39.图中:鞋1、鞋体101、柔性鞋垫102、足底压力传感器103、柔性驱动器2、足弓支撑驱动器201、踝稳定驱动器202、气压源3、气压泵301、稳压阀302、电磁开关阀4、气管5、传感控制模块6、微控制器601、电池602、电压转化模块603、气压传感器604、场效应管开关模块605。
具体实施方式
40.为了详细说明本发明的结构特点及具体操作步骤,现举以下较佳实施例并配合附图进行说明。
41.如图1、图2和图4所示,系统包括左脚、右脚柔性足弓-足踝模块、气压源3和传感控制模块6,可以满足不同步态事件下的足弓和足踝支撑助力。左脚、右脚柔性足弓-足踝模块均与传感控制模块6电连接,左脚、右脚柔性足弓-足踝模块均通过对应的气管5与气压源3相连,气压源3与传感控制模块6连接;左脚、右脚柔性足弓-足踝模块的结构相同,柔性足弓-足踝模块包括鞋1、柔性驱动器2、电磁开关阀4和气管5;鞋1穿着于穿戴者脚上,鞋1与传感控制模块6电连接,鞋1内安装有柔性驱动器2,柔性驱动器2通过气管5与对应的电磁开关阀4相连,各个电磁开关阀4通过气管5与气压源3相连,,由此柔性驱动器2、电磁开关阀4和气压源3之间的气路连通,各个电磁开关阀4均与传感控制模块6电连接;传感控制模块6通过控制各个电磁开关阀4的开启和关闭来控制对应柔性驱动器2所在气路的通断,进而控制各个柔性驱动器2的状态,从而动态调节各个柔性驱动器2对穿戴者的足弓和踝关节处的支撑力,即对穿戴者的足弓和踝关节进行助力。
42.如图2所示,人体穿着该柔性足弓-足踝系统,两只脚各穿一只鞋1,足弓和踝关节紧贴于附着在鞋1内的柔性驱动器2,人体将固定着气压源3、电磁开关阀4和传感控制模块6的亚克力板背在背上。4个电磁开关阀4通过4根气管5分别与两只脚的柔性驱动器2相连,气管5顺着人体的下肢延伸,并留有一定的余量。
43.如图3所示,鞋1包括鞋体101、柔性鞋垫102和足底压力传感器103,鞋体101内设置有柔性鞋垫102,足底压力传感器103设置在柔性鞋垫102下的鞋体101内,用于探测触地信号,足底压力传感器103通过导线连接至传感控制模块6的控制板601,实时确定穿戴者步态事件;
44.柔性驱动器2包括1个足弓支撑驱动器201与2个踝稳定驱动器202,足弓支撑驱动器201与2个踝稳定驱动器202分别通过对应的气管5与2个电磁开关阀4相连,其中2个踝稳定驱动器202与同一个电磁开关阀4相连,足弓支撑驱动器201设置于柔性鞋垫102的上表面,足弓支撑驱动器201与穿戴者的足弓贴合,使得足弓支撑驱动器201对穿戴者的足弓进行支撑,即对穿戴者的足弓进行助力;2个踝稳定驱动器202分别设置在鞋体101的靠近脚跟的两内侧面上,2个踝稳定驱动器202与穿戴者的踝关节贴合,使得2个踝稳定驱动器202对
穿戴者的踝关节进行支撑,即对穿戴者的踝关节进行助力。
45.用于支撑和助力的柔性驱动器2是由具有热塑性聚氨酯(tpu)的双层40d尼龙织物通过层压和热压密封工艺制造获得的。足弓支撑驱动器201的外形模仿正常足的内侧纵弓的生理形态,外形为弓形,踝稳定驱动器202的外形为方形。
46.柔性足弓-足踝模块中的电磁开关阀4为两个,分别为足弓电磁开关阀和足踝电磁开关阀,足弓电磁开关阀和足踝电磁开关阀分别通过对应的气管5与气压源3连通。
47.气压源3包括气压泵301与稳压阀302,气压泵301与稳压阀302相连,稳压阀302通过气管5与对应的电磁开关阀4相连,稳压阀302起到稳定气源气压的作用。
48.传感控制模块6包括微控制器601、电池602、电压转化模块603、4个气压传感器604、场效应管开关模块605;电池602通过电压转化模块603给气压源3、微控制器601、气压传感器604和场效应管开关模块605供电,微控制器601通过导线与各个气压传感器604连接,每个气压传感器604通过气管5分别与对应柔性驱动器2的足弓支撑驱动器201和踝稳定驱动器202连接,实时测量对应柔性驱动器2中的足弓支撑驱动器201和踝稳定驱动器202的内部气压;场效应管开关模块605通过导线与微控制器601和各个电磁开关阀4相连,微控制器601通过向场效应管开关模块605输出pwm(脉冲宽度调制)波控制各个电磁开关阀4的快速开启和关闭。
49.柔性足弓-足踝系统的控制方法:
50.传感控制模块6对穿戴者鞋1内的各个足底压力传感器103检测获得的压力信号进行分析后,获得穿戴者两只脚的步态事件,根据穿戴者两只脚的步态事件,传感控制模块6通过控制对应的电磁开关阀4来动态控制各个柔性驱动器2的工作状态,具体地:
51.如图5所示,步态事件为接触初期、承重期、推进期或摆动期;接触初期、承重期、推进期和摆动期组成一个完整步态周期;
52.当穿戴者左脚步态处于接触初期、承重期时,传感控制模块6通过对应的电磁开关阀4的开启来控制左脚的踝稳定驱动器202开启,用于为穿戴者的左脚踝关节提供支撑力;当穿戴者左脚步态处于推进期和摆动期时,传感控制模块6通过对应的电磁开关阀4的关闭来控制左脚的踝稳定驱动器202关闭;
53.当穿戴者左脚步态处于承重期和推进期时,传感控制模块6通过对应的电磁开关阀4的开启来控制左脚的足弓支撑驱动器201开启,用于为穿戴者的足弓提供支撑力;当穿戴者左脚步态处于摆动期和接触初期时,传感控制模块6通过对应的电磁开关阀4的关闭来控制左脚的足弓支撑驱动器201关闭;
54.当穿戴者右脚步态处于接触初期、承重期时,传感控制模块6通过对应的电磁开关阀4的开启来控制右脚的踝稳定驱动器202开启,用于为穿戴者的脚踝提供支撑力;当穿戴者右脚步态处于推进期和摆动期时,传感控制模块6通过对应的电磁开关阀4的关闭来控制右脚的踝稳定驱动器202关闭;
55.当穿戴者右脚步态处于承重期和推进期时,传感控制模块6通过对应的电磁开关阀4的开启来控制右脚的足弓支撑驱动器201开启,用于为穿戴者的足弓提供支撑力;当穿戴者右脚步态处于摆动期和接触初期时,传感控制模块6通过对应的电磁开关阀4的关闭来控制右脚的足弓支撑驱动器201关闭。
56.每个足底压力传感器103检测获得第一跖骨位置的足底压力和足跟骨位置的足底
压力并发送给传感控制模块6,传感控制模块6将跖骨足底压力与跟骨足底压力分别与对应的预设压力阈值进行比较,获得穿戴者两只脚的步态事件。
57.当跖骨足底压力小于或等于跖骨压力阈值且跟骨足底压力小于或等于跟骨压力阈值,则当前步态为摆动期;当跖骨足底压力小于或等于跖骨压力阈值且跟骨足底压力大于跟骨压力阈值,则当前步态为接触初期;当跖骨足底压力大于跖骨压力阈值且跟骨足底压力大于跟骨压力阈值,则当前步态为承重期;当跖骨足底压力大于跖骨压力阈值且跟骨足底压力小于或等于跟骨压力阈值,则当前步态为推进期。
58.柔性驱动器2开启时的内部气压设定为200kpa,提供一个较大的支撑力,柔性驱动器2关闭时的内部气压设定为50kpa,以保持柔性可压缩的状态。通过与柔性驱动器2相连的气压传感器604实时获取柔性驱动器2的当前气压,微控制器601中设置有增量式pid控制器,用于维持柔性驱动器2气压在设定值。
59.以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭示如上,然而并非用以限定本发明,任何本领域技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。