1.本发明涉及空间温度场检测方法,尤其涉及在电器设备运行时,矩形电器间内墙温度场 检测方法。
背景技术:
2.电器设备在实际功率下工作时会产生大量的热量,在电器间模块主体建造完成后,需要 再外加温度测控系统,检测电器间室内内壁温度场并及时做出调控,以保证电器间温度在正 常范围内。电器间温度不仅影响室内工作人员的身体状况和工作环境,还与电器间设备的安 全运行有着密切关系,设备由于内部损耗会具有一定的温度,如果此时电器间内环境温度过 高,使得设备热量无法及时散失,设备会因为过热而停止工作,甚至受到损坏。目前,在现 有研究的基础上电器间内外空器交互,在内墙温度场检测时采集温度点多,数据量大,且覆 盖不完全,无法满足实际应用的需求。
技术实现要素:
3.本发明的目的在于克服已有技术的不足,提供了极地环境可移动电器间内墙温度场空间 检测方法,使电器间内部温度场可被较为全面且精准的测量,同时改善实现室内各类环境指 标的协调控制和运行耗能巨大的问题。
4.为实现上述目的,本发明采用的技术方案是:
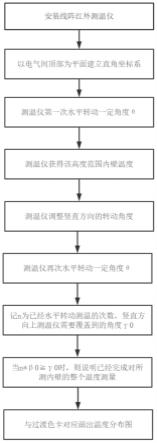
5.本发明的一种极地环境可移动电器间内墙温度场空间检测方法,包括以下步骤:
6.步骤一、以矩形电器间的顶壁为xy平面且将顶壁的中心作为坐标原点建立三维直角坐标 系,其中y轴垂直于电气间的右壁且向右为正方向,x轴垂直于y轴且方向向前为正方向, z轴为垂直于顶壁指向室内;
7.步骤二、在电器间的顶壁坐标原点处安装线阵红外测温摄像仪的云台并调整线阵红外测 温摄像仪的探头发出的红外线形成竖直平面且在一侧待测侧壁上形成高度为l的竖直红外线 线段的顶点位于顶壁,将该高度为l的红外线线段的上端点记为a0,下端点记为b0;上端点 和下端点分别与红外线发射点连线,所成角度为β0;
8.步骤三、线阵红外测温摄像仪绕z轴从θ0转动到π-θ0实现对高度为l的一侧侧壁的 温度的测量,并将温度数据储存为初始数组(θ,β,t),其中转角θ为测温探头的投射的 红外线在xy平面上的分量与x轴正半轴在xy平面上的夹角;β为竖直红外线线段最低点和 电气间顶部中心的连线与xy平面所成的角度,转角θ和转角β标记所测量位置,t表示所测 量位置对应温度,θ的初始值为θ0,β的初始值为β0;
9.其中测量y轴方向的左右侧壁时θ0=arctan(w/l);测量x轴方向的前后侧壁时,θ0=arctan (l/w),式中,w为y轴方向的左右侧壁的宽度,l为x轴方向的前后侧壁宽度;
10.步骤四、线阵红外测温摄像仪判断是否满足n*β0《γ0,γ0=arctan(2h/w),n为测温探头 已进行的水平测温次数,式中,h为所测电气间内壁的高度;若是,则执行下一步,否则执 行步骤七;
11.步骤五、云台带动探头绕x轴向下转动角度β0,然后重复步骤三从第一次测量高度处的 底端向下继续进行温度测量并对温度数据进行记录;每测量高度为l的线段得到的所有温度 数据分别储存为一组初始数组;
12.步骤六、重复步骤四和步骤五直至完成对该侧侧壁温度的测量和记录;
13.步骤七、云台带动探头转动使得探头发出的红外线平面处于竖直平面且在下一个待测侧 壁上形成高度为l的竖直线的顶点位于顶壁,然后重复步骤三-步骤七直至完成全部四个侧壁 温度测量并对温度数据进行储存;
14.步骤八、测量出电器间四个侧壁的温度场后进行温度数据转化,具体步骤如下:
15.第一步,将与每一组初始数据对应的每条线段l上测得的包含温度信息和对应位置信息 的数据以每条线段l的水平中线为对称轴镜像,得到上下倒置的线段l
t
,该倒置线段上端点 记为a,下端点记为b;其中a处温度数据为b0处温度数据,b处温度数据为a0处温度数据, 其他位置点数据一一对应倒置;a、b两点与红外发射点连线,所成角度仍为β0;
16.第二步,将倒置线段l
t
通过k 1个点均分为k段,k为正整数,将每个线段l从a点、 各均分点至b点依次记为i1、i2、i3....im·
、i
k 1
,并记录各点对应的测温温度数据;
17.第三步,测量高为h,宽度为l电气间内壁时,以电气间内壁左下角为原点,以过各个 原点的水平底边和竖直侧边分别为x’轴、y’轴建立平面直角坐标系o
’‑
x’y’,其中x’轴方向向 右为正;y’轴以竖直向上为正方向;建立转化数组(x’,y’,t’),其中(x’,y’)表示测量点的位 置坐标,t’表示与测量点位置处(x’,y’)对应的温度数据;测温仪一共水平转动测温的次数 为n,对于每个倒置线段l
t
上的im点与转化数组(x’,y’,t’)有如下关系,其中m=1,2,3,4.....k, k 1:
18.当θ∈[arctan(l/w),π/2)时:在所测内壁上im点的坐标(x’,y’)为:
[0019]
(w/(2tanθ) l/2,h-tan[(n-1)β0]*w/(2sinθ)-{tan(nβ0)-tan[(n-1)β0]}*(w/(2sinθ))*(m-1)/k)
[0020]
当θ=π/2时:在所测内壁上im点的坐标(x’,y’)为:
[0021]
(l/2,h-tan[(n-1)β0]*w/(2sinθ)-{tan(nβ0)-tan[(n-1)β0]}*(w/(2sinθ))*(m-1)/k)
[0022]
当θ∈(π/2,π-arctan(l/w)]时:在所测内壁上im点的坐标(x’,y’)为:
[0023]
(l/2-w/[2tan(π-θ)],h-tan[(n-1)β0]*w/(2sinθ)-{tan(nβ0)-tan[(n-1)β0]}*(w/(2sinθ))*(m-1)/k)
[0024]
第四步,将进行坐标转换后的各个倒置线段l
t
中不满足x’∈[0,l],y’∈[0,h]的点删除;
[0025]
步骤九、测温仪将保留的每个矩形区域中的每个坐标对应的温度数据输出给计算机并导 入matlab进行数据处理,将每个温度数据与标准色卡对照得到与该温度值对应的色彩,然后 得到与电气间各个内墙侧壁各点的温度对应的色彩分布图。
[0026]
与现有技术相比较,采用本发明的优点在于:本发明实现了对极地环境可移动电器间内 墙温度场空间的检测,方法操作简便且成本低,并可以保证对空间内温度场的全范围检测, 保证了电器间内墙温度场的可测性及电器间内设备运行和人员操作的安全性。
附图说明
[0027]
图1为本发明极地环境可移动电器间内墙温度场空间检测方法的流程图;
[0028]
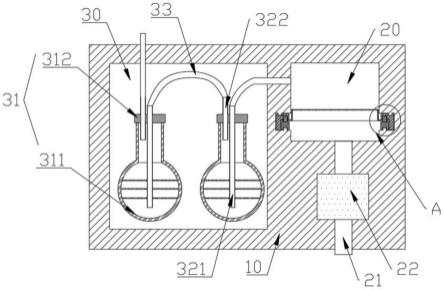
图2为本发明初始空间直角坐标系的建立及线阵红外测温仪起始测量位置示意图;
[0029]
图3为本发明测温探头固定测量角度β0示意图;
[0030]
图4为本发明线阵红外测温仪水平转动测量范围示意图;
[0031]
图5为采用本发明方法测量电器间右侧内壁(尺寸为l*h)时线状红外测温仪转动及温 度与对应位置信息倒置示意图;
[0032]
图6为采用本发明方法第n次测量时线阵红外测温仪测量位置示意图;
[0033]
图7为本发明方法中采用的竖直方向上测温仪需要覆盖到的角度γ0的示意图;
[0034]
图8为本发明针对所测内壁的尺寸(w*h)建立直角坐标系的示意图。
具体实施方式
[0035]
为了能更好地说明本发明的发明内容、特点及功效,兹举一下实施方式,并配合配图, 进行详细说明如下。
[0036]
如附图所示的本发明内墙温度场空间检测方法,包括以下步骤:
[0037]
步骤一、建立三维直角坐标系:以矩形电器间的顶壁为xy平面且将顶壁的中心作为坐标 原点建立三维直角坐标系,其中y轴垂直于电气间的右壁且向右为正方向,x轴垂直于y轴 且方向向前为正方向,z轴为垂直于顶壁指向室内(如图2)。
[0038]
步骤二、在电器间的顶壁坐标原点处安装线阵红外测温摄像仪的云台并调整线阵红外测 温摄像仪的探头发出的红外线形成竖直平面且在一侧待测侧壁上形成高度为l的竖直红外线 线段的顶点位于顶壁,将该高度为l的竖直红外线线段的上端点记为a0,下端点记为b0。其 中a0对应位置为竖直红外线线段最高点,b0对应竖直红外线线段最低点,上端点和下端点分 别与红外线发射点连线,所成角度为β0。
[0039]
该线阵红外测温仪为现有仪器,其工作原理如下:以固定的β0的角度辐射的红外线经过 凸透镜汇在需要测量的侧壁并聚成一条高度为l的竖直线,同时可以获取到该竖直线对应位 置处的侧壁的温度(如图3),云台带动线阵红外测温摄像仪的探头绕z轴逆时针旋转从而形 成全空间的测量覆盖。
[0040]
步骤三、如图4所示,线阵红外测温摄像仪绕z轴从θ0转动到π-θ0实现对高度为l 的一侧侧壁的温度的测量,并将温度数据储存为初始数组(θ,β,t),其中转角θ为测温 探头投射的红外线在xy平面上的分量与x轴正半轴在xy平面上的夹角;β为竖直红外线线 段最低点和电气间顶部中心的连线与xy平面所成的角度。转角θ和转角β标记所测量位置, t表示所测量位置对应温度,θ的初始值为θ0,β的初始值为β0;
[0041]
其中测量y轴方向的左右侧壁时θ0=arctan(w/l);测量x轴方向的前后侧壁时, θ0=arctan(l/w),式中,w为y轴方向的左右侧壁的宽度,l为x轴方向的前后侧壁宽度;
[0042]
步骤四、线阵红外测温摄像仪判断是否满足n*β0《γ0,γ0=arctan(2h/w)(如图7),n 为测温探头已进行的水平测温次数,式中,h为电器间高度,所述的β0是探头发出的红外线 的夹角。若是,则执行下一步,否则执行步骤七;
[0043]
步骤五、云台带动探头绕x轴向下转动角度β0,然后重复步骤三从第一次测量高度
处的 底端向下继续进行温度测量并对温度数据进行记录;每测量高度为l的线段得到的所有温度 数据分别储存为一组初始数组,每一组初始数据与所测量的高度为l的线段相对应。
[0044]
步骤六、重复步骤四和步骤五直至完成对该侧侧壁温度的测量和记录;
[0045]
步骤七、云台带动探头转动使得探头发出的红外线平面处于竖直平面且在下一个待测侧 壁上形成高度为l的竖直线的顶点位于顶壁,然后重复步骤三-步骤七直至完成全部四个侧壁 温度测量并对温度数据进行储存。由于测温仪本身的测温原理,红外线透过透镜射出,每次 辐射的角度固定为β0,但是由于测温仪水平、竖直方向转动的角度不同,因而实际测温的 范围不同,故需要将所获得的数据进行转化,并拼接形成所测内壁的实际温度分布图,这样 才能对实际工程起到帮助作用。
[0046]
步骤八、测量出电器间四个侧壁的温度场后进行温度数据转化,具体步骤如下:
[0047]
第一步,由于红外线透过透镜射出,红外线所接收到的温度信息对应位置,与实际上测 量点的位置,存在上下倒置关系。因此,将与每一组初始数据对应的每条线段l上测得的包 含温度信息和对应位置信息的数据以每条线段l的水平中线为对称轴镜像,得到上下倒置的 线段l
t
,该倒置线段上端点记为a,下端点记为b。其中a处温度数据为b0处温度数据,b处 温度数据为a0处温度数据,其他位置点数据一一对应倒置。a、b两点与红外发射点连线,所 成角度仍为β0;
[0048]
即:将每个初始数组(θ,β,t)中记录的温度值全部倒置,即高度为l的红外线线 段的上端点a0对应的温度值为倒置后红外线线段的下端点的温度值,下端点b0对应的温度值 为倒置后红外线线段的上端点的温度值,成为数组(θ,β,t’);
[0049]
第二步,将倒置线段l
t
通过k 1个点均分为k段,k根据实际需要取值即可,k为正整 数,将每个线段l从a点、各均分点至b点依次记为i1、i2、i3....im、i
k 1
并记录各点对应的测 温温度数据。
[0050]
第三步,测量高为h,宽度为l电气间内壁时,以电气间内壁左下角为原点,以过各个 原点的水平底边和竖直侧边分别为x’轴、y’轴建立平面直角坐标系o
’‑
x’y’(如图8),其 中x’轴方向向右为正;y’轴以竖直向上为正方向。建立转化数组(x’,y’,t’),其中(x’,y’) 表示测量点的位置坐标,t’表示与测量点位置处(x’,y’)对应的温度数据;测温仪一共水平 转动测温的次数为n,对于每个倒置线段l
t
上的im点与转化数组(x’,y’,t’)有如下关系,其 中m=1,2,3,4.....k,k 1:
[0051]
当θ∈[arctan(w/l),π/2)时:在所测内壁上im点的坐标(x’,y’)为:
[0052]
(w/(2tanθ) l/2,h-tan[(n-1)β0]*w/(2sinθ)-{tan(nβ0)-tan[(n-1)β0]}*(w/(2sinθ))*(m-1)/k)
[0053]
当θ=π/2时:在所测内壁上im点的坐标(x’,y’)为:
[0054]
(l/2,h-tan[(n-1)β0]*w/(2sinθ)-{tan(nβ0)-tan[(n-1)β0]}*(w/(2sinθ))*(m-1)/k)
[0055]
当θ∈(π/2,π-arctan(w/l)]时:在所测内壁上im点的坐标(x’,y’)为:
[0056]
(l/2-w/[2tan(π-θ)],h-tan[(n-1)β0]*w/(2sinθ)-{tan(nβ0)-tan[(n-1)β0]}*(w/(2sinθ))*(m-1)/k)
[0057]
第四步,将进行坐标转换后的各个倒置线段l
t
中不满足x’∈[0,l],y’∈[0,h]的
点删除;
[0058]
这是由于测温原理决定了测温仪水平转动时会有部分辐射到电器间地面上,故在针对所 测内壁建立的平面直角坐标系中,会在转化后的坐标系中的x’轴下方出现含有温度数据的 点。这部分的温度并不属于内墙,因此应在测温仪转换完成所有含有温度的坐标数据以后, 直角坐标系中只保留x’∈[0,l],y’∈[0,h]这一矩形区域,而删除其余部分。
[0059]
步骤九、测温仪将保留的每个矩形区域中的每个坐标对应的温度数据输出给计算机并导 入matlab进行数据处理,将每个温度数据与标准色卡对照得到与该温度值对应的色彩,然后 得到与电气间各个内墙侧壁各点的温度对应的色彩分布图。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。