技术特征:
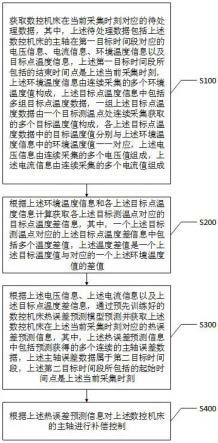
1.一种数控机床主轴误差预测补偿方法,其特征在于,所述数控机床主轴误差预测补偿方法包括:获取数控机床在当前采集时刻对应的待处理数据,其中,所述待处理数据包括所述数控机床的主轴在第一目标时间段对应的电压信息、电流信息、环境温度信息以及目标点温度信息,所述第一目标时间段所包括的结束时间点是所述当前采集时刻,所述环境温度信息由连续采集的多个环境温度值构成,所述目标点温度信息中包括多组目标点温度数据,一组所述目标点温度数据由一个目标测温点处连续采集获取的多个目标温度值构成,各所述目标点温度数据中的目标温度值分别与所述环境温度信息中的环境温度值一一对应,所述电压信息由连续采集的多个电压值组成,所述电流信息由连续采集的多个电流值组成;根据所述环境温度信息和各所述目标点温度信息计算获取各所述目标测温点对应的目标点温度差信息,其中,一个所述目标测温点对应的所述目标点温度差信息中包括多个温度差值,所述温度差值是一个所述目标温度值与对应的一个所述环境温度值的差值;根据所述电压信息、所述电流信息以及所述目标点温度差信息,通过预先训练好的数控机床热误差预测模型预测并获取所述数控机床在所述当前采集时刻对应的热误差预测信息,其中,所述热误差预测信息中包括预测获得的多个连续的主轴误差数据,所述主轴误差数据属于第二目标时间段,所述第二目标时间段所包括的起始时间点是所述当前采集时刻;根据所述热误差预测信息对所述数控机床的主轴进行补偿控制。2.根据权利要求1所述的数控机床主轴误差预测补偿方法,其特征在于,所述获取数控机床在当前采集时刻对应的待处理数据,包括:通过预设的传感器实时获取所述数控机床的主轴在当前采集时刻的电压值、电流值以及各所述目标测温点处对应的目标温度值;通过预设的红外成像仪实时获取所述数控机床所在的目标区域在当前采集时刻的环境温度值;获取所述数控机床对应的历史数据,所述历史数据包括在所述当前采集时刻之前采集和存储的电压信息、电流信息、环境温度信息以及多个目标点温度信息;根据所述当前采集时刻的电压值、电流值、各所述目标测温点对应的目标温度值、环境温度值以及所述历史数据获取所述待处理数据。3.根据权利要求2所述的数控机床主轴误差预测补偿方法,其特征在于,所述通过预设的红外成像仪实时获取所述数控机床所在的目标区域在当前采集时刻的环境温度值,包括:通过预设的红外成像仪采集获取所述目标区域在当前采集时刻对应的红外图像;根据预设的测温点区域半径对所述红外图像中各所述目标测温点对应的测温点区域进行剔除,获得环境区域红外图像;根据所述环境区域红外图像计算获取所述当前采集时刻的环境温度值。4.根据权利要求1所述的数控机床主轴误差预测补偿方法,其特征在于,所述热误差预测信息中包括预测获得的预测步数个连续的主轴误差数据,所述根据所述热误差预测信息对所述数控机床的主轴进行补偿控制,包括:从所述热误差预测信息中的第1个主轴误差数据开始,选择所述热误差预测信息中的
目标步数个连续的主轴误差数据并作为目标误差数据;根据所述目标误差数据对所述数控机床的主轴进行逐步补偿控制;其中,所述目标步数小于所述预测步数。5.根据权利要求4所述的数控机床主轴误差预测补偿方法,其特征在于,所述目标步数为1。6.根据权利要求1所述的数控机床主轴误差预测补偿方法,其特征在于,所述预先训练好的数控机床热误差预测模型是预先训练好的循环神经网络预测模型,所述循环神经网络预测模型通过以下步骤进行预先训练:获取训练数据集,其中,所述训练数据集包括多个训练数据以及多个训练目标数据,所述训练数据与所述训练目标数据一一对应,一个所述训练数据中包括采集获取的训练机床在第一训练时间段对应的训练电压信息、训练电流信息以及训练目标点温度差信息,一个所述训练目标数据中包括采集获取的所述训练机床在第二训练时间段对应的训练热误差信息,一个所述训练数据的第一训练时间段所包括的结束时间点是与该训练数据对应的训练目标数据的第二训练时间段所包括的起始时间点;根据所述训练数据、所述训练目标数据以及预设的热误差阈值,通过多目标优化算法对所述循环神经网络的参数进行更新并获得训练好的循环神经网络预测模型,其中,所述训练好的循环神经网络模型针对输入的训练数据进行预测获得对应的模型预测数据,所述模型预测数据与该训练数据对应的训练目标数据之间的损失值不大于所述热误差阈值。7.根据权利要求1-6任意一项所述的数控机床主轴误差预测补偿方法,其特征在于,在根据所述电压信息、所述电流信息以及所述目标点温度差信息,通过预先训练好的数控机床热误差预测模型预测并获取所述数控机床在所述当前采集时刻对应的热误差预测信息之后,所述方法还包括:存储所述当前采集时刻对应的热误差预测信息。8.根据权利要求1-6任意一项所述的数控机床主轴误差预测补偿方法,其特征在于,所述方法还包括:根据预设的数据格式判断所述数控机床在当前采集时刻对应的待处理数据是否出错;当所述数控机床在当前采集时刻对应的待处理数据出错时,获取所述数控机床的历史热误差预测信息,根据所述历史热误差预测信息中与所述当前采集时刻对应的主轴误差数据对所述数控机床的主轴进行补偿控制,其中,所述历史热误差预测信息是所述数控机床在前一采集时刻对应的热误差预测信息。9.根据权利要求1-6任意一项所述的数控机床主轴误差预测补偿方法,其特征在于,在根据所述电压信息、所述电流信息以及所述目标点温度差信息,通过预先训练好的数控机床热误差预测模型预测并获取所述数控机床在所述当前采集时刻对应的热误差预测信息之后,所述方法还包括:当所述当前采集时刻对应的热误差预测信息中有任意一个主轴误差数据超过预先设置的主轴误差最大值时,控制所述数控机床停止运行并发出告警信号。10.一种数控机床主轴误差预测补偿系统,其特征在于,所述系统包括:数据获取模块,用于获取数控机床在当前采集时刻对应的待处理数据,其中,所述待处理数据包括所述数控机床的主轴在第一目标时间段对应的电压信息、电流信息、环境温度
信息以及目标点温度信息,所述第一目标时间段所包括的结束时间点是所述当前采集时刻,所述环境温度信息由连续采集的多个环境温度值构成,所述目标点温度信息中包括多组目标点温度数据,一组所述目标点温度数据由一个目标测温点处连续采集获取的多个目标温度值构成,各所述目标点温度数据中的目标温度值分别与所述环境温度信息中的环境温度值一一对应,所述电压信息由连续采集的多个电压值组成,所述电流信息由连续采集的多个电流值组成;数据处理模块,用于根据所述环境温度信息和各所述目标点温度信息计算获取各所述目标测温点对应的目标点温度差信息,其中,一个所述目标测温点对应的所述目标点温度差信息中包括多个温度差值,所述温度差值是一个所述目标温度值与对应的一个所述环境温度值的差值;误差预测模块,用于根据所述电压信息、所述电流信息以及所述目标点温度差信息,通过预先训练好的数控机床热误差预测模型预测并获取所述数控机床在所述当前采集时刻对应的热误差预测信息,其中,所述热误差预测信息中包括预测获得的多个连续的主轴误差数据,所述主轴误差数据属于第二目标时间段,所述第二目标时间段所包括的起始时间点是所述当前采集时刻;误差补偿模块,用于根据所述热误差预测信息对所述数控机床的主轴进行补偿控制。
技术总结
本发明公开了一种数控机床主轴误差预测补偿方法及系统,方法包括:获取数控机床在当前采集时刻对应的待处理数据,包括数控机床的主轴在第一目标时间段对应的电压信息、电流信息、环境温度信息及目标点温度信息;根据环境温度信息和各目标点温度信息计算获取各目标测温点的目标点温度差信息;根据电压信息、电流信息及目标点温度差信息,通过预先训练好的数控机床热误差预测模型预测并获取数控机床在当前采集时刻对应的热误差预测信息,热误差预测信息中包括预测获得的多个连续的主轴误差数据,主轴误差数据属于第二目标时间段;根据热误差预测信息对数控机床的主轴进行补偿控制。本发明方案有利于提高误差补偿效率和数控机床的工作效率。控机床的工作效率。控机床的工作效率。
技术研发人员:郭媛君 朱俊丞 江俊杰 胡天宇 王丽媛 鲁江权 贺勇 魏国军
受保护的技术使用者:中科航迈数控软件(深圳)有限公司
技术研发日:2022.05.30
技术公布日:2022/7/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。