1.本发明涉及仓储物流设备技术领域,尤其是涉及一种自动解除捆扎带的设备。
背景技术:
2.在仓储物流领域,若干个堆叠的纸箱一般都会通过捆扎带进行捆扎,保证其在运输过程中的稳定。当纸箱被运输到指定位置时,需要对纸箱进行分装搬运。纸箱进行分装搬运前,需要将捆扎带进行解除。现有技术中,解除捆扎带的方式一半都是人工拆包,不利于实现自动化,存在效率底,成本高的问题。因此,需要设计一种自动解除捆扎带的设备,可以自动解除纸箱上的捆扎带。
技术实现要素:
3.本发明为了克服现有技术中解除捆扎带的方式一半都是人工拆包,不利于实现自动化,存在效率底,成本高的问题,提供一种自动解除捆扎带的设备,可以自动解除纸箱上的捆扎带。
4.为了实现上述目的,本发明采用以下技术方案:一种自动解除捆扎带的设备,包括机械臂和剪断机构,剪断机构包括固定架、剪刀机构和夹紧机构,所述固定架与机械臂固定,剪刀机构包括第一升降驱动机构和剪刀本体,第一升降驱动机构固定在固定架上,第一升降驱动机构驱动剪刀本体上下移动,夹紧机构包括第二升降驱动机构和两个夹紧组件,第二升降驱动机构固定在固定架上,第二升降驱动机构驱动夹紧组件上下移动,剪刀本体设置在两个夹紧组件之间。
5.上述技术方案中,机械臂采用现有技术中常用的6轴机械臂即可,固定架固定在机械臂上,由机械臂带动其在空间内移动。第一升降驱动机构和第二升降驱动机构为直线驱动机构,可以是气缸、推杆电机、电机驱动的丝杆螺母机构、电机驱动的齿轮齿条机构等。剪刀本体可以采用现有技术中常用的电动剪刀。上述设备的工作流程:1. 机械臂驱动剪断机构整体上下运动,使剪刀本体位于捆扎带的斜上方,而后驱动剪断机构整体水平向前运动,直至剪断机构前端面贴紧纸箱,使捆扎带完处于夹紧组件的正下方时停止运动。2.启动第二升降驱动机构,使两个夹紧组件,同时下降至最低位置,此时夹紧组件上的滑动夹板插入到了捆扎带和物料之间的空隙,此时启动夹紧组件的伸缩驱动件,使两个夹紧组件的滑动夹板同时缩回(夹紧组件滑动夹板的初始状态是完全伸出状态),此时捆扎带被夹紧组件的两个夹板夹住且位于剪刀刃口的正下方。3.启动第一升降驱动机构,使张开刃口的剪刀下降至最低位置(剪刀初始状态是张开刃口并位于其可升降范围内的最高处),此时位于两个夹紧组件内的这段捆扎带的正中间已经在剪刀的刃口内,启动剪刀机构剪断捆扎带。4.启动两个夹紧组件中任意一个夹紧组件的伸缩驱动件,使捆扎带一端落下,另一个夹紧组件仍处于夹持状态,此时通过驱动剪断机构运动,使捆扎带被完全拉离拆包工位,直至将其拉至回收位置后启动另一个夹紧组件的伸缩驱动件,使捆扎带落至回收区域。
6.作为优选,所述夹紧机构包括固定块、固定夹板、滑动夹板和伸缩驱动件,固定夹
板和伸缩驱动件分别与固定块固定,伸缩驱动件驱动滑动夹板沿水平方向滑动。所述结构可以实现夹紧机构的夹紧功能,通过伸缩驱动件的伸缩控制滑动夹板滑动,从而使固定夹板与滑动夹板夹紧与打开。
7.作为优选,所述剪断机构还包括定位架,定位架与固定架固定,定位架的侧壁上设有行程开关。所述行程开关与纸箱侧壁接触时会缩回,当行程开关完全缩回时可以判断为剪断机构前端面贴紧纸箱。
8.作为优选,所述剪刀本体包括支撑块、剪切驱动件和两个相互铰接的刀刃,第一升降驱动机构驱动支撑块上下移动,剪切驱动件与支撑块固定,其中一个刀刃与支撑块固定,剪切驱动件驱动另一个刀刃转动。
9.作为优选,所述固定架下方固定有吸取机构,吸取机构包括吸盘。所述吸盘可以使剪断机构具有物料搬运功能。物料搬运工作流程是:1. 机械臂驱动剪断机构整体运动,直至固定架下方的吸盘贴紧纸箱的上表面后启动吸盘,吸取纸箱(每个吸盘可吸取2箱)。2.纸箱被吸盘吸起后,驱动夹具整体运动使纸箱被搬运至指定的落料位置。3.关闭吸盘使纸箱落下。
10.作为优选,所述吸取机构还包括若干个导杆,吸盘的数量为多个,吸盘通过对应的导杆与固定架沿竖直方向滑动连接。所述结构使吸盘之间可以相对上下滑动,使每一个吸盘都可以紧贴纸箱上表面,保证吸附效果。
11.作为优选,所述夹紧机构包括固定块、固定夹板、伸缩驱动件和滑动组件,伸缩驱动件和固定夹板分别与固定块固定;滑动组件包括连接块、导向件、伸缩杆、连接杆、活动夹板和伸缩弹簧,伸缩驱动件驱动连接块沿水平方向滑动,导向件与固定架沿水平方向滑动连接,导向件与连接块沿竖直方向滑动连接(即导向件相对为固定架的竖直位置不变,水平位置可以随连接块一起移动),伸缩杆与连接块沿水平方向滑动连接,连接杆的一端与伸缩杆的一端铰接,连接杆的另一端与活动夹板铰接,活动夹板与连接块转动连接,导向件上设有竖向设置的导向槽,导向槽上半部分的宽度大于下半部分的宽度,导向槽上半部分和下半部分中间平滑过渡,伸缩杆上固定有滑动柱,滑动柱设置在导向槽内,伸缩弹簧用于连接伸缩杆和连接块。
12.夹紧机构处于捆扎带上方时,可能存在歪斜状态,下降时,导致其中一个夹紧组件无法将捆扎带卡入两个夹板之间,导致后续动作无法实现,无法剪断捆扎带。上述技术方案中,当滑动组件处于相对上方位置时,在伸缩弹簧的作用下可以使活动夹板的下端向外侧伸出,具有一定的伸缩性,即使夹紧机构存在一定的歪斜,也可以使两个活动夹板的下端都紧贴纸箱侧壁,在夹紧机构下降时,活动夹板的下端先捆扎带和物料之间的空隙,然后夹紧机构继续下降,导向槽会使滑动柱带动伸缩杆滑动,从而带动活动夹板的下端克服弹簧力回缩(活动夹板的下端回缩后,略微向固定夹板一侧倾斜),最终使活动夹板与固定夹板平行,此时活动夹板如果向固定夹板一侧移动捆扎带不容易从活动夹板上脱离,然后通过伸缩驱动件使滑动组件整体缩回,使活动夹板和固定夹板夹紧捆扎带。且活动夹板的缩回状态只与滑动组件的高度位置相关,避免滑动组件在高处时,活动夹板错误缩回,导致的捆扎带无法被夹紧的情况发生。
13.作为优选,所述连接杆的一端与活动夹板的上端铰接,活动夹板的中间位置与连接块转动连接,在伸缩杆的滑动方向上,设靠近活动夹板的一侧为外侧,靠近固定夹板的一
侧为内侧,导向槽的上半部分靠近内侧的内侧壁所在的竖直面为第一基准面,导向槽的下半部分靠近内侧的内侧壁所在的竖直面为第二基准面,第一基准面设置在第二基准面的内侧。
14.上述技术方案中,当滑动柱处于导向槽的上半部分时,在伸缩弹簧的作用下,滑动柱会靠向第一基准面使活动夹板的下端伸出,当活动夹板的下端接触纸箱时,会使活动夹板的下端被动缩回;当滑动柱处于导向槽的下半部分时,在第二基准面的作用下,滑动柱会使活动夹板的下端主动缩回。
15.作为优选,所述连接杆的中间位置与活动夹板的中间位置铰接,活动夹板的上端与连接块转动连接,在伸缩杆的滑动方向上,设靠近活动夹板的一侧为外侧,靠近固定夹板的一侧为内侧,导向槽的上半部分靠近外侧的内侧壁所在的竖直面为第一基准面,导向槽的下半部分靠近外侧的内侧壁所在的竖直面为第二基准面,第一基准面设置在第二基准面的外侧。
16.上述技术方案中,当滑动柱处于导向槽的上半部分时,在伸缩弹簧的作用下,滑动柱会靠向第一基准面,使活动夹板的下端伸出,当活动夹板的下端接触纸箱时,会使活动夹板的下端被动缩回,滑动柱会脱离第一基准面;当滑动柱处于导向槽的下半部分时,在第二基准面的作用下,滑动柱会使活动夹板的下端主动缩回。
17.本发明的有益效果是:(1)一机两用,既可以拆包又可以吸取,是机器人进行自动拆包作业不可或缺的专用工具,尤其是解决了传统需要手工完成的捆扎带剪断任务和纸箱夹取时容易破损的难题。从而实现了物料出库过程的全自动化,大幅提高了工作效率,降低了企业的生产成本。此夹具采用压缩空气作为动力源,清洁无污染,动力传递简单可靠。采用铝合金机架,自重较轻且耐腐蚀。(2)即使夹紧机构存在一定的歪斜,也可以使两个活动夹板的下端都紧贴纸箱侧壁,使活动夹板和固定夹板夹紧捆扎带。且活动夹板的缩回状态只与滑动组件的高度位置相关,避免滑动组件在高处时,活动夹板错误缩回,导致的捆扎带无法被夹紧的情况发生。
附图说明
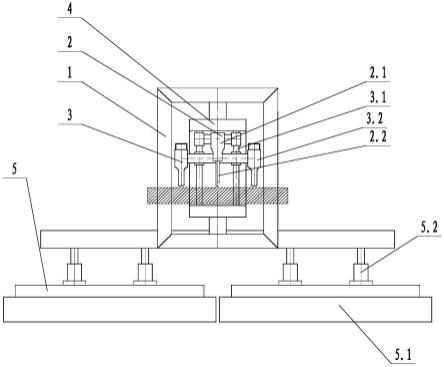
18.图1是本发明中剪断机构的主视图;图2是本发明中剪断机构的侧视图;图3是实施例3的结构示意图;图4是实施例5的结构示意图。
19.图中:固定架1、剪刀机构2、第一升降驱动机构2.1、剪刀本体2.2、夹紧机构3、第二升降驱动机构3.1、夹紧组件3.2、固定块3.2.1、固定夹板3.2.2、滑动夹板3.2.3、滑动组件3.2.5、连接块3.2.5.1、导向件3.2.5.2、伸缩杆3.2.5.3、连接杆3.2.5.4、活动夹板3.2.5.5、导向槽3.2.5.7、滑动柱3.2.5.8、定位架4、吸取机构5、吸盘5.1、导杆5.2、第一基准面6、第二基准面7。
具体实施方式
20.下面结合附图和具体实施例对本发明做进一步的描述。
21.实施例1:
如图1和图2所示,一种自动解除捆扎带的设备,包括机械臂和剪断机构,剪断机构包括固定架1、剪刀机构2、夹紧机构3和定位架4,定位架4与固定架1固定,定位架4的侧壁上设有行程开关,所述固定架1与机械臂固定,剪刀机构2包括第一升降驱动机构2.1和剪刀本体2.2,第一升降驱动机构2.1固定在固定架1上,第一升降驱动机构2.1驱动剪刀本体2.2上下移动,夹紧机构3包括第二升降驱动机构3.1和两个夹紧组件3.2,第二升降驱动机构3.1固定在固定架1上,第二升降驱动机构3.1驱动夹紧组件3.2上下移动,剪刀本体2.2设置在两个夹紧组件3.2之间。固定架1下方固定有吸取机构5,吸取机构5包括两个吸盘5.1,吸盘5.1通过若干个导杆5.2与固定架1沿竖直方向滑动连接。
22.上述技术方案中,机械臂采用现有技术中常用的6轴机械臂即可,固定架1固定在机械臂上,由机械臂带动其在空间内移动。第一升降驱动机构2.1和第二升降驱动机构3.1为直线驱动机构,可以是气缸、推杆电机、电机驱动的丝杆螺母机构、电机驱动的齿轮齿条机构等。剪刀本体2.2可以采用现有技术中常用的电动剪刀。上述设备的工作流程:1. 机械臂驱动剪断机构整体上下运动,使剪刀本体2.2位于捆扎带的斜上方,而后驱动剪断机构整体水平向前运动,直至剪断机构前端面贴紧纸箱,使捆扎带完处于夹紧组件3.2的正下方时停止运动。2.启动第二升降驱动机构3.1,使两个夹紧组件3.2,同时下降至最低位置,此时夹紧组件3.2上的滑动夹板3.2.3插入到了捆扎带和物料之间的空隙,此时启动夹紧组件3.2的伸缩驱动件,使两个夹紧组件3.2的滑动夹板3.2.3同时缩回(夹紧组件3.2滑动夹板3.2.3的初始状态是完全伸出状态),此时捆扎带被夹紧组件3.2的两个夹板夹住且位于剪刀刃口的正下方。3.启动第一升降驱动机构2.1,使张开刃口的剪刀下降至最低位置(剪刀初始状态是张开刃口并位于其可升降范围内的最高处),此时位于两个夹紧组件3.2内的这段捆扎带的正中间已经在剪刀的刃口内,启动剪刀机构2剪断捆扎带。4.启动两个夹紧组件3.2中任意一个夹紧组件3.2的伸缩驱动件,使捆扎带一端落下,另一个夹紧组件3.2仍处于夹持状态,此时通过驱动剪断机构运动,使捆扎带被完全拉离拆包工位,直至将其拉至回收位置后启动另一个夹紧组件3.2的伸缩驱动件,使捆扎带落至回收区域。物料搬运工作流程是:1. 机械臂驱动剪断机构整体运动,直至固定架1下方的吸盘5.1贴紧纸箱的上表面后启动吸盘5.1,吸取纸箱(每个吸盘5.1可吸取2箱)。2.纸箱被吸盘5.1吸起后,驱动夹具整体运动使纸箱被搬运至指定的落料位置。3.关闭吸盘5.1使纸箱落下。
23.实施例2:在实施例1的基础上,所述夹紧机构3包括固定块3.2.1、固定夹板3.2.2、滑动夹板3.2.3和伸缩驱动件,固定夹板3.2.2和伸缩驱动件分别与固定块3.2.1固定,伸缩驱动件驱动滑动夹板3.2.3沿水平方向滑动。所述结构可以实现夹紧机构3的夹紧功能,通过伸缩驱动件的伸缩控制滑动夹板3.2.3滑动,从而使固定夹板3.2.2与滑动夹板3.2.3夹紧与打开。
24.实施例3:如图3所示,在实施例1的基础上,所述夹紧机构3包括固定块3.2.1、固定夹板3.2.2、伸缩驱动件和滑动组件3.2.5,伸缩驱动件和固定夹板3.2.2分别与固定块3.2.1固定;滑动组件3.2.5包括连接块3.2.5.1、导向件3.2.5.2、伸缩杆3.2.5.3、连接杆3.2.5.4、活动夹板3.2.5.5和伸缩弹簧,伸缩驱动件驱动连接块3.2.5.1沿水平方向滑动,导向件3.2.5.2与固定架1沿水平方向滑动连接,导向件3.2.5.2与连接块3.2.5.1沿竖直方向滑动连接(即导向件3.2.5.2相对为固定架1的竖直位置不变,水平位置可以随连接块3.2.5.1一
起移动),伸缩杆3.2.5.3与连接块3.2.5.1沿水平方向滑动连接,连接杆3.2.5.4的一端与伸缩杆3.2.5.3的一端铰接,连接杆3.2.5.4的另一端与活动夹板3.2.5.5铰接,活动夹板3.2.5.5与连接块3.2.5.1转动连接,导向件3.2.5.2上设有竖向设置的导向槽3.2.5.7,导向槽3.2.5.7上半部分的宽度大于下半部分的宽度,导向槽3.2.5.7上半部分和下半部分中间平滑过渡,伸缩杆3.2.5.3上固定有滑动柱3.2.5.8,滑动柱3.2.5.8设置在导向槽3.2.5.7内,伸缩弹簧套设在伸缩杆3.2.5.3上,伸缩弹簧的两端分别连接伸缩杆3.2.5.3和连接块3.2.5.1。
25.夹紧机构3处于捆扎带上方时,可能存在歪斜状态,下降时,导致其中一个夹紧组件3.2无法将捆扎带卡入两个夹板之间,导致后续动作无法实现,无法剪断捆扎带。上述技术方案中,当滑动组件3.2.5处于相对上方位置时,在伸缩弹簧的作用下可以使活动夹板3.2.5.5的下端向外侧伸出,具有一定的伸缩性,即使夹紧机构3存在一定的歪斜,也可以使两个活动夹板3.2.5.5的下端都紧贴纸箱侧壁,在夹紧机构3下降时,活动夹板3.2.5.5的下端先捆扎带和物料之间的空隙,然后夹紧机构3继续下降,导向槽3.2.5.7会使滑动柱3.2.5.8带动伸缩杆3.2.5.3滑动,从而带动活动夹板3.2.5.5的下端克服弹簧力回缩(活动夹板3.2.5.5的下端回缩后,略微向固定夹板3.2.2一侧倾斜),最终使活动夹板3.2.5.5与固定夹板3.2.2平行,此时活动夹板3.2.5.5如果向固定夹板3.2.2一侧移动捆扎带不容易从活动夹板3.2.5.5上脱离,然后通过伸缩驱动件使滑动组件3.2.5整体缩回,使活动夹板3.2.5.5和固定夹板3.2.2夹紧捆扎带。且活动夹板3.2.5.5的缩回状态只与滑动组件3.2.5的高度位置相关,避免滑动组件3.2.5在高处时,活动夹板3.2.5.5错误缩回,导致的捆扎带无法被夹紧的情况发生。
26.实施例4:如图3所示,在实施例3的基础上,所述连接杆3.2.5.4的一端与活动夹板3.2.5.5的上端铰接,活动夹板3.2.5.5的中间位置与连接块3.2.5.1转动连接,在伸缩杆3.2.5.3的滑动方向上,设靠近活动夹板3.2.5.5的一侧为外侧,靠近固定夹板3.2.2的一侧为内侧,导向槽3.2.5.7的上半部分靠近内侧的内侧壁所在的竖直面为第一基准面6,导向槽3.2.5.7的下半部分靠近内侧的内侧壁所在的竖直面为第二基准面7,第一基准面6设置在第二基准面7的内侧。
27.上述技术方案中,当滑动柱3.2.5.8处于导向槽3.2.5.7的上半部分时,在伸缩弹簧的作用下,滑动柱3.2.5.8会靠向第一基准面6使活动夹板3.2.5.5的下端伸出,当活动夹板3.2.5.5的下端接触纸箱时,会使活动夹板3.2.5.5的下端被动缩回;当滑动柱3.2.5.8处于导向槽3.2.5.7的下半部分时,在第二基准面7的作用下,滑动柱3.2.5.8会使活动夹板3.2.5.5的下端主动缩回。
28.实施例5:如图4所示,在实施例3的基础上,所述连接杆3.2.5.4的中间位置与活动夹板3.2.5.5的中间位置铰接,活动夹板3.2.5.5的上端与连接块3.2.5.1转动连接,在伸缩杆3.2.5.3的滑动方向上,设靠近活动夹板3.2.5.5的一侧为外侧,靠近固定夹板3.2.2的一侧为内侧,导向槽3.2.5.7的上半部分靠近外侧的内侧壁所在的竖直面为第一基准面6,导向槽3.2.5.7的下半部分靠近内侧的外侧壁所在的竖直面为第二基准面7,第一基准面6设置在第二基准面7的外侧。
29.上述技术方案中,当滑动柱3.2.5.8处于导向槽3.2.5.7的上半部分时,在伸缩弹簧的作用下,滑动柱3.2.5.8会靠向第一基准面6,使活动夹板3.2.5.5的下端伸出,当活动夹板3.2.5.5的下端接触纸箱时,会使活动夹板3.2.5.5的下端被动缩回,滑动柱3.2.5.8会脱离第一基准面6;当滑动柱3.2.5.8处于导向槽3.2.5.7的下半部分时,在第二基准面7的作用下,滑动柱3.2.5.8会使活动夹板3.2.5.5的下端主动缩回。
30.本发明的有益效果是:(1)一机两用,既可以拆包又可以吸取,是机器人进行自动拆包作业不可或缺的专用工具,尤其是解决了传统需要手工完成的捆扎带剪断任务和纸箱夹取时容易破损的难题。从而实现了物料出库过程的全自动化,大幅提高了工作效率,降低了企业的生产成本。此夹具采用压缩空气作为动力源,清洁无污染,动力传递简单可靠。采用铝合金机架,自重较轻且耐腐蚀。(2)即使夹紧机构3存在一定的歪斜,也可以使两个活动夹板3.2.5.5的下端都紧贴纸箱侧壁,使活动夹板3.2.5.5和固定夹板3.2.2夹紧捆扎带。且活动夹板3.2.5.5的缩回状态只与滑动组件3.2.5的高度位置相关,避免滑动组件3.2.5在高处时,活动夹板3.2.5.5错误缩回,导致的捆扎带无法被夹紧的情况发生。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。