1.本发明涉及一种光纤陀螺线振动及角振动下动态误差的不失真测试方法,属于领域。
背景技术:
2.近年来,光纤陀螺以其特有的优点逐渐成为惯性导航技术领域中的主流仪表之一,随着各项技术的发展,高精度光纤陀螺逐渐走向实用化,走进市场。对于高精度光纤陀螺而言,其环境适应性是衡量陀螺性能的重要标准之一,因此线振动及角振动下的测试实验及数据分析十分重要。
3.目前大多数光纤陀螺在线振动及角振动下实验过程中根据测试时间来分别存储振前数据、振后数据,及振中到达量级后开始测试n分钟后的振中数据,并使用matlab对三个阶段的数据进行拼接处理,但此数据处理方法人为主观性较重,数据量不能充分反映整个振动过程中的数据偏差情况,尤其对于高精度光纤陀螺,若振动一分钟,陀螺输出2000*60个数据,在振中出现一个3
°
/s的瞬时值影响振中均值达0.09
°
/h,影响振动结果的准确性。
4.为此,需要提出一种通用的、简便直观的高精度光纤陀螺在线振动及角振动下动态测试及数据处理方法,提高其振动的准确性及工作效率。
技术实现要素:
5.本发明解决的技术问题是:针对目前现有技术中,线振动及角振动下动态测试过程中使用matlab分别对振前、振后及振中量级到达后开始测试n分钟后的三组数据拼接处理方法带来的人为误差所导致的振动结果超差的问题,提出了一种光纤陀螺线振动及角振动下动态误差的不失真测试方法。
6.本发明解决上述技术问题是通过如下技术方案予以实现的:
7.一种光纤陀螺线振动及角振动下动态误差的不失真测试方法,步骤如下:
8.(1)将待测陀螺安装于振动台上,预设相应振动条件,于振动过程中,通过待测陀螺采集全程数据;
9.(2)于全程数据中,通过matlab程序智能判断振动前、振动中、振动后各阶段的数据,根据所得数据计算获取振动结果。
10.所述待测陀螺安装于振动台后,振动前、振动中、振动后,通过指定测试系统进行全程数据连续采集,保证振动前、振动中、振动后数据连续及完整。
11.通过matlab程序智能判断的具体方法为:
12.(1)于采集的待测陀螺全程数据中,判断任意数据是否为振动中数据,振动中数据与振动前数据数值存在差异,若所选数据前后数据数值差异与振动中数据与振动前数据数值差异相同,则所选数据位振动中数据;
13.(2)判断出振动前、振动中、振动后数据后,通过振动公式计算,获取陀螺线振动及
角振动结果。
14.所述振动中数据与振动前数据数值差异为:
15.起振时陀螺输出数值大于前段指定时间内待测陀螺输出数值的平均值;
16.若待测陀螺数据由振动台静止至振动状态时,待测陀螺输出数据的变化数值差异若存在,则当前时刻待测陀螺数据为振动中数据。
17.所述计算陀螺线振动或角振动结果过程中,对振动中第一时段内的起始数据、振动后第一时段内的起始数据进行标记,标记时应向后多采集一个时段的数据以避免同一数据被重复利用计算。
18.所述振动过程中,各时段的时间范围根据振动试验所需进行确定,各时段内数据即为当前时段采集数据。
19.本发明与现有技术相比的优点在于:
20.(1)本发明提供的一种光纤陀螺线振动及角振动下动态误差的不失真测试方法,在线振动及角振动实验测试过程中无需人工分段保存振前、振中、振后三个阶段的数据,若同时采集多只陀螺的振动数据,可避免由于存储过多数据导致的保存混淆的人为误差隐患;
21.(2)本发明在整个线振动或角振动过程中,只需在振动前几分钟开启陀螺测试软件,保持连续采集整个振动过程中的数据,最后以matlab智能判断振前、振中、振后三个阶段,整个过程中无需人工操作,只需在振后保存计算数据,仅需10s即可直观的展示振动结果,且可避免由于存储数据混淆导致的实验结果失真,保证陀螺振动结果的准确性,提升了工作效率;
22.(3)本发明由于测试方法及数据处理方法由振动台及计算机相互配合实现,适用于不同软件协议的陀螺,具有通用性。
附图说明
23.图1为发明提供的线振动及角振动条件下光纤陀螺动态误差的不失真测试方法流程图;
24.图2为发明提供的采集全程光纤陀螺数据文件与分段存储陀螺数据文件对比图;
25.图3为发明提供的智能判读高精度光纤陀螺在线振动及角振动测试中的输出数据图;
26.图4为发明提供的智能判读数据后matlab计算结果与分段保存计算结果对比图;
具体实施方式
27.一种光纤陀螺线振动及角振动下动态误差的不失真测试方法,能够实现光纤陀螺线振动及角振动下动态误差的不失真测试方法,具体步骤如下:
28.(1)将待测陀螺安装于振动台上,预设相应振动条件,于振动过程中,通过待测陀螺采集全程数据;
29.(2)于全程数据中,通过matlab程序智能判断振动前、振动中、振动后各阶段的数据,根据所得数据计算获取振动结果。
30.其中,待测陀螺安装于振动台后,振动前、振动中、振动后,通过指定测试系统进行
全程数据连续采集,保证振动前、振动中、振动后数据连续及完整;
31.通过matlab程序智能判断的具体方法为:
32.(1)于采集的待测陀螺全程数据中,判断任意数据是否为振动中数据,振动中数据与振动前数据数值存在差异,若所选数据前后数据数值差异与振动中数据与振动前数据数值差异相同,则所选数据位振动中数据;
33.(2)判断出振动前、振动中、振动后数据后,通过振动公式计算,获取陀螺线振动及角振动结果;
34.振动中数据与振动前数据数值差异为:
35.起振时陀螺输出数值大于前段指定时间内待测陀螺输出数值的平均值;
36.若待测陀螺数据由振动台静止至振动状态时,待测陀螺输出数据的变化数值差异若存在,则当前时刻待测陀螺数据为振动中数据;
37.计算陀螺线振动或角振动结果过程中,对振动中第一时段内的起始数据、振动后第一时段内的起始数据进行标记,标记时应向后多采集一个时段的数据以避免同一数据被重复利用计算;
38.振动过程中,各时段的时间范围根据振动试验所需进行确定,各时段内数据即为当前时段采集数据。
39.下面结合具体实施例进行进一步说明:
40.在当前实施例中,将待测陀螺安装在振动工装上,最后一起安装于振动台上,设定振动条件后,进行线振动或角振动实验,整个过程中陀螺开启测试软件进行连续采集振前、振中、振后数据。最后使用matlab智能判断并计算陀螺振动实验结果。
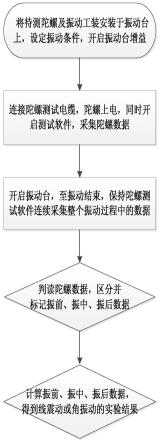
41.本发明线振动、角振动条件下光纤陀螺动态误差的不失真测试与评价方法如图1所示。
42.本发明具体包括以下步骤:
43.(1)将陀螺安装于振动工装,再一并安装于振动台上,设置振动条件,开启振动台增益。
44.(2)连接陀螺测试电缆,陀螺上电,开启测试软件,采集振前数据。
45.(3)开启振动台,同时陀螺测试软件连续采集振中数据。
46.(4)振动结束后,陀螺测试软件继续连续采集振后数据,断电后保存连续采集的整个振动过程中的数据,如图2所示,全程测试陀螺数据存储文件所示。
47.(5)利用matlab软件的自定义处理程序智能判读计算保存的陀螺振动数据,matlab软件的自定义处理程序包括:陀螺数据的读取,陀螺数据的判读,区分并标记陀螺振前、振中、振后数据,计算陀螺振前、振中、振后数据等4个功能模块。
48.(6)振动台起振后陀螺输出数据特征较明显,由陀螺数据判读模块进行区分是否为起振数据,若是,则标记之前的数据为振前数据。
49.(7)同时振动结束后陀螺输出数据特征同样明显,由陀螺数据判读模块进行区分是否振动结束,若是,则标记之后为振后数据。
50.(8)此时,标记为振前及振后数据的中间段数据,为陀螺振中输出,需要注意的是,取振中数据时,应将标记的振前、振后的数据向后多取一位数,避免振前、振中、振后数据的重复计算,此部分由区分并标记陀螺振前、振中、振后数据模块进行标记。区分并标记三部
分数据后结果如图3所示
51.(9)通过计算区分后的陀螺振前、振中、振后数据,得到线振动或角振动的实验结果,如图4所示,全程采集陀螺测试结果所示。
52.本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
53.本发明说明书中未作详细描述的内容属于本领域技术人员的公知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。