1.本公开涉及微机电陀螺仪和电子系统。
背景技术:
2.众所周知,在微机电陀螺仪中,零率输出(zro)的稳定性是性能质量的关键参数,并且可能对非常高的精度至关重要。
3.正交误差是决定微机电陀螺仪的零率输出(zro)范围的主要因素之一。简而言之,正交误差由影响输出信号的缺陷引起。简言之,微机电陀螺仪包括:驱动质量块,其受限于支撑结构,以根据驱动方向来以(至少)一个自由度振荡;以及感测质量块,其受限于驱动质量块,以沿驱动方向拖动并且根据与驱动方向垂直的感测方向以(至少)一个自由度相对于驱动质量块振荡。当支撑结构围绕与驱动方向和感测方向垂直的旋转轴旋转时,根据角速度和驱动方向上的速度,由于拖动,感测质量块在感测方向上受到虚力。由虚力引起的感测质量块的位移被转换为与相对于旋转轴的角速度成比例的电信号。根据其他已知的解决方案,单个可移动质量受限于支撑结构并且可以沿着驱动方向以一定自由度、并且沿着感测方向以一定自由度振荡。因此,质量同时作为驱动质量块和感测质量块。
4.由于与支撑结构与一个或多个可移动质量之间的连接元件的制造相关的不可避免的缺陷,驱动方向与感测方向不完全垂直。结果是由相同的驱动运动引起的感测方向上的位移,并导致正交噪声信号分量,该分量相对于有用信号相移90
°
。即使陀螺仪处于静止状态,该分量也会存在,并且会导致输出信号出现偏移。寿命期间偏移的振幅和稳定性是新一代陀螺仪的关键参数。
5.通过相位对温度的相关性,正交误差也是对零率输出稳定性影响最大的因素之一。
6.为了减少零率输出的漂移,已知采取了一些措施,但由于若干原因,这些措施并不完全令人满意。
7.第一已知解决方案是所谓的系列补偿。实际上,在统计基础上确定的相同校正被应用于一个系列的所有陀螺仪。基于为系列估计的正交和所测量的温度,以数字方式对输出执行校正。虽然因为它便宜,所以有吸引力,但是因为它不是个性化的,所以解决方案并不是特别准确。因此,偏离被用作确定系列补偿的基础的设备参数的设备的参数示出了输出的残余漂移。
8.更准确的解决方案是单独校准陀螺仪,从而确定特定校正并以数字方式应用于每个设备。校准的准确度明显更高,但过程昂贵且耗时极长。
9.根据另一已知解决方案,闭环动态补偿被执行。陀螺仪被提供有:电极和感测电路,其被配置为连续地或通过样本来感测实际偏移;并且被提供有闭环补偿电路,其根据所感测的偏移来确定补偿信号并且将补偿信号施加到输出信号。该解决方案可能非常准确,它能够使得补偿适配于陀螺仪的实际情况,并且对设备使用寿命期间发生的漂移也有效。然而,所使用的补偿电路具有复杂的架构,并且除了在生产成本方面昂贵之外,在能量消耗
方面也是昂贵的,能量消耗是另一基本参数。
技术实现要素:
10.本公开旨在提供允许克服或至少减轻上述限制的微机电陀螺仪和电子系统。
11.本公开的一方面提供了一种微机电陀螺仪,包括:支撑结构;感测质量块,其以沿驱动方向以及感测方向的自由度耦合到支撑结构,驱动方向与感测方向彼此垂直;校准结构,其面向感测质量块、并且通过具有平均宽度的间隙与感测质量块间隔开,校准结构相对于感测质量块可移动,使得校准结构的位移引起间隙的平均宽度的变化;以及校准致动器,其被配置为控制校准结构相对于感测质量块的相对位置和间隙的平均宽度。
12.根据一个或多个实施例,其中校准致动器包括:校准电极,校准电极被布置在支撑结构上并且被电容耦合到校准结构;以及偏置源,耦合到校准电极。
13.根据一个或多个实施例,其中:驱动方向平行于支撑结构的面,并且感测方向垂直于面并且垂直于驱动方向;并且校准结构被连接到固定到支撑结构的支点部,并且校准结构围绕平行于面且垂直于驱动方向和感测方向二者的支点轴线旋转。
14.根据一个或多个实施例,其中:校准结构包括校准板,校准板被耦合到支点部、并且具有关于支点部对置的第一部分和第二部分;并且第一部分在感测质量块与支撑结构相对的一侧上面向感测质量块,并且通过间隙与感测质量块间隔开。
15.根据一个或多个实施例,其中校准结构包括:耦合质量块,耦合质量块被刚性接合到校准板的第二部分并且被电容耦合到校准电极。
16.根据一个或多个实施例,陀螺仪包括:至少一个感测电极,至少一个感测电极被布置在支撑结构的面上、并且面向感测质量块并且被电容耦合到感测质量块,以及其中感测质量块沿着感测方向被布置在感测电极与校准结构之间。
17.根据一个或多个实施例,其中驱动方向和感测方向二者均平行于支撑结构的面。
18.根据一个或多个实施例,其中校准结构具有第一侧,第一侧面向感测质量块的一侧并且通过间隙与感测质量块分离,并且其中校准电极面向校准结构的第二侧,第二侧与第一侧相对。
19.根据一个或多个实施例,其中校准结构沿感测方向相对于感测质量块可移动。
20.根据一个或多个实施例,陀螺仪包括:至少一个感测电极,至少一个感测电极固定到支撑结构,并且其中感测质量块是框架状的,并且感测电极被电容耦合到感测质量块的相应侧。
21.根据一个或多个实施例,其中感测电极被布置在感测质量块内部。
22.根据一个或多个实施例,陀螺仪包括:驱动质量块,驱动质量块沿驱动方向相对于支撑结构可移动,并且其中感测质量块受限于驱动质量块,以在驱动方向上由驱动质量块拖动并且沿着感测方向相对于驱动质量块可移动。
23.根据一个或多个实施例,陀螺仪包括:盖体,盖体以气密方式接合到支撑结构,以在盖体与支撑结构之间形成气密闭合的室,并且其中感测质量块和校准结构被容纳在室内。
24.本公开的另一方面提供了一种电子系统,包括:微机电陀螺仪,包括:支撑结构,具有表面;盖体,被耦合到支撑结构;室,由支撑结构和盖体界定;锚固部,从支撑结构延伸到
室中;感测质量块,通过多个柔性部被耦合到支撑结构并且覆盖支撑结构的表面;支点部,被耦合到与支撑结构的表面间隔开的锚固部的端部,支点部具有支点轴线;校准结构,耦合到支点部,校准结构具有:校准板,耦合到支点部,校准板具有在支点轴线的第一侧上的第一部分以及在支点轴线的第二侧上的第二部分,第一部分覆盖感测质量块;间隙,从校准板延伸到感测质量块;处理单元,耦合到微机电陀螺仪。
25.根据一个或多个实施例,其中微机电陀螺仪还包括校准电极,校准电极在支撑结构的表面上。
26.根据一个或多个实施例,其中微机电陀螺仪还包括耦合质量块,耦合质量块与校准板的第二部分耦合,耦合质量块与校准电极重叠。
27.根据一个或多个实施例,其中校准板被配置为:在朝向第一操作配置的第一旋转方向上围绕支点轴线旋转,并且在朝向与第一操作配置不同的第二操作配置的第二旋转方向上围绕支点轴线旋转,第二旋转方向与第一旋转方向相对。
28.本公开的实施例有利地抵消或在任何情况下显著降低零率输出的温度漂移。
附图说明
29.为了更好地理解本公开,现在将仅通过非限制性示例并且参考附图来描述其一些实施例,其中:
30.图1是根据本公开的一个实施例的微机电陀螺仪的截面图。
31.图2是图1的微机电陀螺仪沿图1的ii-ii线截取的俯视图。
32.图3是图1的微机电陀螺仪的简化框图;
33.图4和图5分别为在系列校准操作之前和之后与系列陀螺仪相关的量的图;
34.图6和图7分别示出了图1的微机电陀螺仪处于第一操作配置和第二操作配置中;
35.图8-图13是图1的微机电陀螺仪的制造过程的连续步骤中半导体晶片的截面图;
36.图14是根据本公开的不同实施例的微机电陀螺仪的俯视图,为了清楚起见去除了部分;
37.图15是图14的微机电陀螺仪沿图14的xv-xv线截取的前视图;
38.图16是根据本公开的又一实施例的微机电陀螺仪的俯视图,为了清楚起见去除了部分;
39.图17是图16的微机电陀螺沿图16的xvii-xvii线截取的前视图;以及
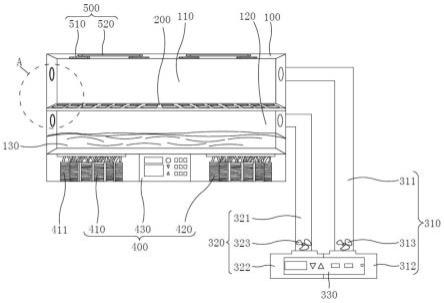
40.图18是并入根据本公开的微机电陀螺仪的电子系统的简化框图。
具体实施方式
41.参考图1,根据本公开的实施例的微机电陀螺仪被示意性地图示并且使用附图标记1来指示,并且微机电陀螺仪包括封装结构2、可移动感测质量块3和校准结构5。
42.封装结构2包括支撑结构6和盖体7,支撑结构6和盖体7以气密方式结合在一起并且在彼此之间限定气密闭合和密封的室8。在室8中存在受控气氛,例如低压氩气。支撑结构6可以是单个单片半导体主体或包括若干层,例如单晶基底以及彼此连接并且直接或通过中间层(诸如电介质层,例如氧化硅,或者导电层,诸如适当掺杂的多晶硅层)而与基底连接的一个或多个外延层。
43.感测质量块3和校准结构5被容纳在室8中。支撑结构6和盖体7界定室8,室8可以被称为腔。
44.感测质量块3是半导体材料,例如单晶外延硅,并且通过柔性部10而受限于支撑结构6。柔性部10被配置为允许感测质量块3相对于支撑结构6沿着驱动方向dd振荡,驱动方向dd平行于支撑结构6的面6a,面6a可以被称为表面,并且允许感测质量块3沿着感测方向ds振荡,感测方向ds横向于或垂直于面6a和驱动方向dd。驱动致动器12可操作为使得感测质量块3以受控频率和振幅沿着驱动方向dd振荡。例如,驱动致动器12可以包括以梳指配置耦合的、被固定到支撑结构6的电极组以及被固定到感测质量块3的可移动电极组。
45.通过掺杂而导电的感测质量块3被电容耦合到感测电极13,感测电极13被布置在支撑结构6的面6a上并且面向感测质量块3。
46.校准结构5借助锚固部16而被连接到固定到支撑结构6的支点部15,并且可以围绕支点轴线f旋转,支点轴线f平行于面6a并且横向于或垂直于驱动方向dd和感测方向ds二者。更详细地,校准结构5包括校准板17和耦合质量块18,耦合质量块18被电容耦合到支撑结构6的面6a上的校准电极20。校准板17和耦合质量块18被结合在一起来形成单个刚体。支点部15位于与支撑结构6的面6a间隔开的锚固部的端部。
47.校准板17被连接到支点部15并且具有第一部分17a以及相对于支点部15相对的第二部分17b。在一个实施例中,校准板17相对于支点部15偏心,使得第一部分17a具有比第二部分17b更大的尺寸。第一部分17a在与支撑结构6相对的一侧上面向感测质量块3并且与感测质量块3间隔开间隙21。感测质量块3因此沿着感测方向ds而位于感测电极13和校准结构5之间。如下文详细解释的,间隙21的平均宽度w由感测质量块3的静止位置和校准结构5的位置确定。当校准板17处于如图1所示的位置时,第一部分17a位于支点轴线f的第一侧上,而第二部分位于支点轴线f的第二侧上。
48.耦合质量块18被电容耦合到校准电极20,并且因此受到静电力的影响,静电力的符号和强度与校准电极20的偏压相关。
49.陀螺仪1被提供有在图3中示意性地图示的控制单元25,控制单元25除其他之外尤其具有确定校准电极20的偏压的任务。控制单元25包括:驱动设备26,其被配置为使得感测质量块3沿驱动方向dd以受控频率和振幅振荡;感测设备27,其被配置为感测作为可移动质量的感测质量块3沿感测方向ds的位移,并且将所感测的位移转换为输出信号so,输出信号so指示陀螺仪1旋转速度;校准模块28和电荷泵30。校准模块28驱动电荷泵30,电荷泵30被耦合到校准电极20并且设置校准电压vc。因此,在实践中,校准电极20和电荷泵30限定校准致动器,校准致动器被配置为控制校准结构5相对于感测质量块3的相对位置,并且特别是间隙21的平均宽度w。
50.由于温度引起的陀螺仪1的零率输出漂移的补偿以如下方式发生。最初,系列校准被应用,系列校准在一个实施例中由校准模块28通过作用于感测设备27而修改输出信号so来执行。通过观察具有与陀螺仪1相同结构的陀螺仪样本,系列校准在统计基础上被确定。平均误差由样本的零率输出的漂移分布而确定(图4)并且对应校正被应用于该系列的所有陀螺仪。系列校准的效果如图5所示。温度漂移的残余差由于品质因数q的扩散而引起,品质因数q的扩散由于过程缺陷因设备而异而引起。品质因数q受室8中的气体分子的移动性影响,而后者又与周围质量块的距离相关。具体地,在陀螺仪1中,品质因数q与在感测质量块3
以及校准板17的第一部分17a(即,校准结构5面向感测质量块3本身的部分)之间的间隙21的平均宽度w的平方根成比例:
[0051][0052]
通过作用在校准电极20上,施加到校准结构5的静电力可以借助耦合质量块18进行调制,并且因此间隙21的振幅可以通过相应地修改品质因数q来改变,以抵消或在任何情况下显著降低,在没有旋转的情况下的输出信号so的温度漂移,即,零率输出(zro)。具体地,在图1的实施例中,静电力借助校准电极20的调制允许校准结构5逆时针旋转来减小间隙21的宽度w和品质因数q,逆时针可以被称为第一旋转方向,以及顺时针旋转来增加间隙21的宽度w和品质因数q,顺时针可以被称为与第一旋转方向相对的第二旋转方向。品质因数q的校正执行起来非常简单和快速,并且因此可以在每个单独的设备上执行,而无需花费太多时间来基本上消除由正交误差引起的输出信号so上的偏移。控制单元25本身可以被提供有校准功能,例如可以根据命令或在某些稳定性条件发生时激活。以这种方式,零率输出的校准不仅可以在使用前在工厂中被执行,而且可以随后在设备的使用寿命期间被执行来消除可能因老化、热机械应力以及一般而言的环境因素而出现的分量。
[0053]
图6示出了处于第一操作配置的图1的微机电陀螺仪1。如图6所示,当微机电陀螺仪1处于第一操作配置时,校准板17处于第一位置。当处于第一操作配置时,校准板17已沿逆时针方向旋转,使得第一部分17a已朝向感测质量块3旋转,而第二部分17b已旋转远离校准电极20。当校准板17处于第一位置时,平均宽度w减小,使得图6中所示的平均宽度w小于图1中所示的平均宽度w。
[0054]
图7示出了图1的微机电陀螺仪1处于与图6所示的第一操作配置不同的第二操作配置中。如图7所示,当微机电陀螺仪1处于第二操作配置时,校准板17处于第二位置。当处于第二操作配置时,校准板17已沿顺时针方向旋转,使得第一部分17a已旋转远离感测质量块3旋转、并且第二部分17b已朝向校准电极20旋转。当校准板17处于第二位置时,平均宽度w增加,使得图7中所示的平均宽度w大于图1中所示的平均宽度w。
[0055]
应当容易理解,校准板17的第一位置不同于校准板的第二位置。当校准板17处于如图6所示的第一位置时,与校准板17处于如图7所示的第二位置时相比,校准板17的第一部分17a更靠近感测质量块3。当校准板17处于第一位置时,校准板17的第二部分17b与校准板17处于如图7所示的第二位置时相比,更远离校准电极20。
[0056]
图1的陀螺仪1可以通过下文参考图8至图16描述的过程形成。在实践中,如下文详细描述的,一侧上的感测质量块3、耦合质量块18和支点部15的锚固部16以及另一侧上的校准板17根据在彼此之上外延生长的两个结构层获得。
[0057]
参考图8,例如氧化硅的第一电介质层51生长在半导体材料(例如单晶硅)的晶片50的基底6'上。例如多晶硅的导电层(未示出)被沉积在第一电介质层51上并且被成成形为形成感测电极13和校准电极20。例如热生长或沉积的氧化硅的第一牺牲层53形成在第一电介质层51上,在感测电极13和校准电极20之上。第一牺牲层53在与锚固部16和支撑结构6的周边(外围)部分相对应的位置中被选择性蚀刻,这将在以后形成。然后,第一外延层55形成在第一牺牲层53之上。第一外延层55具有基于期望微机电结构的特性而确定的厚度并且可以被包括在例如2到80μm之间。在外延生长之后,第一外延层55例如借助cmp(化学机械抛光)被平坦化并且达到期望的最终厚度。
[0058]
图9中的第一外延层55被蚀刻来限定期望结构和其他预期区域的底部部分。具体地,在该步骤中,驱动致动器12和柔性部10(此处未示出)可以由第一外延层55形成。此外,第一外延层55旨在形成感测质量块3、耦合质量块18和锚固部16的各部分彼此分离。为此,晶片50被抗蚀剂掩模(未示出)覆盖并且经受干法蚀刻,从而形成完全穿过第一外延层55的沟槽61,抗蚀剂掩模可以被称为第一沟槽掩模。蚀刻在第一牺牲层53上自动停止。
[0059]
然后,例如teos(四乙基原硅酸盐)的第二牺牲层60被沉积为例如包括在1至2μm之间的厚度。第二牺牲层60部分地填充沟槽61,例如填充其深度的三分之一,但是该填充以及填充程度和深度并不重要。第二牺牲层60然后被平坦化。
[0060]
如图10所示,第二牺牲层60使用掩模层(未示出)而被选择性地蚀刻和去除,从而形成开口62,掩模层可以被称为第二锚固掩模。第二牺牲层60的蚀刻自动终止于第一外延层55上。通常,第二锚固开口62形成在需要在第一外延层55与稍后形成的第二外延层之间形成连接区的区域中。具体地,此处,第二锚固开口62被形成在与支点部15、耦合质量块18和校准板17之间的接合区以及晶片50的周边部分相对应的位置中。
[0061]
随后,在图11中,第二外延层65被生长,其厚度在此处也与期望的微机电结构相关,并且在此处也可以被包括在2至80μm之间。通常,第二外延层65可以比第一外延层55薄,但是可能发生相反的情况并且本公开不限于在外延层55、65的厚度之间的任何特定比率。
[0062]
在外延生长之后,第二外延层65例如通过cmp(化学机械抛光)被平坦化并且达到期望的最终厚度。以这种方式,由第一和第二外延层55、65形成的结构层(也被称为总外延层)达到最终厚度,最终厚度通常在20和80μm之间变化。
[0063]
晶片50如图12所示被蚀刻。为此,晶片50被抗蚀剂掩模(未示出)覆盖并且经受干法蚀刻。在该步骤中,在整个外延层的整个厚度范围内,外延层55、65未被第二沟槽掩模覆盖的部分被去除,并且蚀刻在第一牺牲层53上停止。
[0064]
具体地,在该步骤中,感测质量块3、校准板17和耦合质量块18被限定。
[0065]
然后,图13,第二牺牲层60和第一牺牲层53的残留部分被去除,从而释放可移动质量和校准结构5。
[0066]
最后,与盖体7相对应的盖体晶片(未示出)借助粘合剂层而被接合到晶片50并且如此获得的复合晶片被切割来形成图1的陀螺仪1。外延层55、65在每个管芯中的周边部分与基底6'的相应部分一起形成陀螺仪1的支撑结构6。
[0067]
参考图14和图15,根据本公开的一个实施例的微机电陀螺仪100包括封装结构102、感测质量块103和校准结构105。封装结构102包括支撑结构106和盖体107,它们以气密方式被结合在一起或耦合在一起,并且在彼此之间限定气密闭合的室108,其中存在受控气氛,例如低压氩气。
[0068]
感测质量块103和校准结构105被容纳在室108中。支撑结构106和盖体107界定室108,室108可以被称为腔。
[0069]
半导体材料的感测质量块103是框架状的并且通过柔性部110受限于支撑结构106。柔性部110被配置为允许感测质量块103沿着驱动方向dd’并且沿着感测方向ds’相对于支撑结构106振荡,驱动方向dd’和感测方向ds’均平行于支撑结构106的面106a,并且彼此横向或垂直。驱动致动器112可操作为使得感测质量块103以受控的频率和振幅沿着驱动方向dd'振荡。
[0070]
被固定到支撑结构106的感测电极113面对感测质量块103的相应侧并且被电容耦合到感测质量块103的相应侧。在一个实施例中,感测电极113被布置在感测质量块103的框架结构内部。
[0071]
校准结构105由质量块109限定,质量块109借助柔性部115而被连接到支撑结构106,柔性部115允许沿着感测方向ds'移动。校准结构105具有面对感测质量块103的一侧并且与感测质量块103间隔开间隙121的第一侧105a。间隙121的平均宽度w'由感测质量块103的静止位置和校准结构105的位置来确定。此外,校准结构105被电容耦合到校准电极120,校准电极120被布置在支撑结构106上并且面向校准结构105与第一侧105a相对的第二侧105b。校准电极120可以与图3的电荷泵30组合使用来形成由校准模块28控制的校准致动器。校准结构105因此经受强度与校准电极120的偏压相关的静电力。通过作用在校准电极120上,施加到校准结构105的静电力可以被调制,并且因此间隙121的振幅可以通过相应地修改品质因数q而被修改为抵消或在任何情况下显著减小零率输出的温度漂移。具体地,在图14和图15的实施例中,校准结构105可以被移动更靠近感测质量块103来减小间隙121的宽度w'和品质因数q,并且远离感测质量块103移动来减小间隙121的宽度w'和品质因数q。
[0072]
参考图16和图17,根据本公开的一个实施例的微机电陀螺仪200包括封装结构202、驱动质量块201、感测质量块203和校准结构205。封装结构202包括支撑结构206和盖体207,支撑结构206和盖体207以气密方式结合在一起或耦合在一起并且在彼此之间限定气密闭合的室108,其中存在受控气氛,例如低压氩气。
[0073]
驱动质量块201、感测质量块203和校准结构205被容纳在室208中。支撑结构206和盖体207界定室208,室208可以被称为腔。
[0074]
半导体材料的驱动质量块201是c形的并且通过柔性部210a而受限于支撑结构206。柔性部210a被配置为允许驱动质量块201相对于支撑结构206沿着平行于支撑结构206本身的面206a的驱动方向dd”振荡。驱动致动器212可操作为使得驱动质量块201沿驱动方向dd”以受控的频率和振幅振荡。
[0075]
同样由半导体材料制成的感测质量块203被容纳在驱动质量块201的内部并且面向开口侧并且通过柔性部210b而受限于驱动质量块201。柔性部210b被配置为允许感测质量块203相对于驱动质量块201并且因此相对于支撑结构206沿着感测方向ds”振荡,感测方向ds”平行于支撑结构206的面206a并且横向于或垂直于驱动方向dd”。
[0076]
被固定到支撑结构206的感测电极213面对感测质量块203的一侧并且被电容耦合到感测质量块203的一侧。在一个实施例中,感测电极213被布置在感测质量块203与c形感测质量块203的闭合侧之间。
[0077]
校准结构205由质量块209限定,质量块209通过柔性部215而被连接到支撑结构206,柔性部215允许沿感测方向d”的移动。校准结构205具有面向感测质量块203的一侧并且与感测质量块203间隔开间隙221的第一侧205a。间隙221的平均宽度w”由驱动质量块201的静止位置和校准结构205的位置来确定。此外,校准结构205被电容耦合到校准电极220,校准电极220被布置在支撑结构206上并且面向校准结构205与第一侧205a相对的第二侧205b。校准电极220可以与图3的电荷泵30组合使用来形成由校准模块28控制的校准致动器。同样在这种情况下,通过作用在校准电极220上,间隙221的振幅可以通过相应地修改品质因数q而被修改,以抵消或在任何情况下显著降低零率输出的温度漂移。
[0078]
图18示出了可以是任何类型的电子系统300,电子系统300具体是但不限于可穿戴设备,诸如手表、智能手镯或手环;计算机,诸如大型机、个人计算机、笔记本计算机或平板计算机;智能电话;数字音乐播放器、数码相机或用于处理、存储、传输或接收信息的任何其他设备。电子系统300可以是通用或设备嵌入式处理系统、设备或进一步的系统。
[0079]
电子系统300包括处理单元302、存储器设备303、根据本公开的微机电陀螺仪(例如,图1的微机电陀螺仪1)并且还可以被提供有输入/输出(i/o)设备305(例如,键盘、指示器、触摸屏或一些其他合适类型的输入或接口设备)、无线接口306、外围设备307.1、
……
、307.n和此处未示出的可能的其他辅助设备。电子系统300的组件可以借助总线308直接和/或间接地彼此通信耦合。电子系统300还可以包括电池309。应当注意,本公开的范围不限于必须具有一个或所有列出的设备的实施例。
[0080]
根据设计偏好,处理单元302可以包括例如一个或多个微处理器、微控制器等。处理单元302可以包括例如一个或多个处理器、控制器等。
[0081]
存储器设备303可以包括各种类型的易失性存储设备和非易失性存储设备,例如用于易失类型的sram和/或dram存储器和固态存储器、用于非易失类型的磁盘和/或光盘。
[0082]
最后,显然,在不脱离所附权利要求所限定的本公开的范围的情况下,可以对微机电陀螺仪和所描述的方法进行修改和变化。
[0083]
微机电陀螺仪可以被概括为包括:支撑结构(6;106;206);感测质量块(3;103;203),其沿着彼此垂直的驱动方向(dd;dd’;dd”)和感测方向(ds;ds')以一定自由度耦合到支撑结构(6;106;206);校准结构(5;105;205),其面向感测质量块(3;103;203)并且与感测质量块(3;103;203)间隔开具有平均宽度(w;w’;w”)的间隙(21;121;221),校准结构(5;105;205)相对于感测质量块(3;103;203)可移动,使得校准结构(5;105;205)的位移导致间隙(21;121;221)的平均宽度(w;w
′
;w
″
)的变化;校准致动器(20、30;120、30;220、30),其被配置为控制校准结构(5;105;205)相对于感测质量块(3;103;203)的相对位置和间隙(21;121;221)的平均宽度(w;w';w")。
[0084]
校准致动器(20、30;120、30;220、30)可以包括:校准电极(20;120;220),其被布置在支撑结构(6;106;206)上并且被电容耦合到校准结构(5;105;205);以及被耦合到校准电极(20;120;220)的偏置源(30)。
[0085]
驱动方向(dd)可以平行于支撑结构(6)的面(6a)并且感测方向(ds)可以垂直于面(6a)并且垂直于驱动方向(dd),并且校准结构(5)可以被连接到被固定到支撑结构(6)的支点部(15)并且可以围绕支点轴线(f)旋转,支点轴线(f)平行于面(6a)并且垂直于驱动方向(dd)和感测方向(ds)两者。
[0086]
校准结构(5)可以包括与支点部(15)耦合的校准板(17)并且可以具有关于支点部对置的第一部分(17a)以及第二部分(17b);第一部分(17a)在感测质量块(3)与支撑结构(6)相对的一侧上面向感测质量块(3),并且可以与感测质量块(3)间隔开间隙(21)。
[0087]
校准结构(5)可以包括耦合质量块(18),耦合质量块(18)被刚性结合到校准板(17)的第二部分(17b)并且被电容耦合到校准电极(20)。
[0088]
陀螺仪可以包括至少一个感测电极(13),至少一个感测电极(13)被布置在支撑结构(6)的面(6a)上并且面向感测质量块(3)并且被电容耦合到感测质量块(3),其中感测质量块(3)可以沿着感测方向(ds)被布置在感测电极(13)与校准结构(5)之间。
[0089]
驱动方向(dd';dd”)和感测方向(ds';ds”)二者均可以平行于支撑结构(106;206a)的面(106a;206a)。
[0090]
校准结构(105;206)可以具有第一侧(105a;205a),第一侧(105a;205a)面向感测质量块(103;203)的一侧并且与感测质量块(103;203)间隔开间隙(121;221),并且校准电极(120;220)面向校准结构(105;205)与第一侧(105a;205a)相对的第二侧(105b;205b)。
[0091]
校准结构(105;205)可以沿着感测方向(ds';ds”)相对于感测质量块(103;203)移动。
[0092]
陀螺仪可以包括至少一个感测电极(113;213),至少一个感测电极(113;213)被固定到支撑结构(106;206),其中感测质量块(103;203)可以是框架状,并且感测电极(113;213)可以被电容耦合到感测质量块(103;203)的相应侧。
[0093]
感测电极(113;213)可以被布置在感测质量块(102;203)的内部。
[0094]
陀螺仪可以包括驱动质量块(201),驱动质量块(201)沿驱动方向(dd”)相对于支撑结构(206)可移动,感测质量块(203)可以受限于驱动质量块(201),以在驱动方向(dd”)上被驱动质量块拖动并且沿着感测方向(ds”)相对于驱动质量块(201)可移动。
[0095]
陀螺仪可以包括以气密方式连接到支撑结构(6;106;206)的盖体(7;107;207),以形成在盖体(7;107;206)与支撑结构(6;106;206)之间气密闭合的室(8;108;208),其中感测质量块(3;103;203)和校准结构(5;105;205)可以被容纳在室(8;108;208)内部。
[0096]
电子系统可以被概括为包括处理单元(402)和陀螺仪(1;100;200)。
[0097]
一种补偿微机电陀螺仪中的输出热漂移的方法,所述微机电陀螺仪可以被概括为包括:支撑结构(6;106;206);以及感测质量块(3;103;203),其沿着彼此垂直的驱动方向(dd;dd’;dd”)和感测方向(ds;ds')以一定自由度被耦合到支撑结构(6;106;206);以及校准结构(5;105;205),其面向感测质量块(3;103;203)并且与感测质量块(3;103;203)间隔开具有平均宽度(w;w’;w”)的间隙(21;121;221);方法包括将校准结构(5;105;205)布置为面向感测质量块(3;103;203)并且与感测质量块(3;103;203)间隔开具有平均宽度(w;w’;w”)的间隙(21;121;221);以及移动校准结构(5;105;205)来改变间隙(21;121;221)的平均宽度(w;w’;w”)。
[0098]
根据本公开,提供了微机电陀螺仪和用于补偿微机电陀螺仪中的输出热漂移的方法。
[0099]
在至少一个实施例中,微机电陀螺仪包括支撑结构。感测质量块以沿驱动方向和感测方向的自由度被耦合到支撑结构,驱动方向与感测方向彼此横向或垂直。校准结构面向感测质量块并且通过具有平均宽度的间隙而与感测质量块分离,校准结构相对于感测质量块可移动,使得校准结构的位移引起间隙平均宽度的变化。校准致动器被配置为控制校准结构相对于感测质量块的相对位置和间隙的平均宽度。
[0100]
在至少一个实施例中,方法包括:补偿微机电陀螺仪中的输出热漂移,包括:将微机电陀螺仪的校准结构布置为面向感测质量块并且与感测质量块间隔开具有平均宽度的间隙,以及移动校准结构来改变间隙的平均宽度。
[0101]
在至少一个实施例中,系统包括微机电陀螺仪,微机电陀螺仪包括:具有表面的支撑结构;与支撑结构耦合的盖体;由支撑结构和盖体界定的室;从支撑结构延伸到室中的锚固部;感测质量块,其通过多个柔性部而被耦合到支撑结构并且覆盖支撑结构的表面;支点
部,其被耦合到与支撑结构的表面间隔开的锚固部的端部,支点部具有支点轴线;与支点部耦合的校准结构,校准结构具有:与支点部耦合的校准板,校准板具有在支点轴线的第一侧上的第一部分和在支点轴线的第二侧上的第二部分,第一部分与感测质量块重叠;从校准板延伸到感测质量块的间隙。与微机电陀螺仪耦合的处理单元。
[0102]
本公开的一方面提供了一种方法,包括:补偿微机电陀螺仪中的输出热漂移,包括:将微机电陀螺仪的校准结构布置为面向感测质量块并且通过具有平均宽度的间隙与感测质量块间隔开;移动校准结构来改变间隙的平均宽度。
[0103]
根据一个或多个实施例,其中移动校准结构来改变间隙的平均宽度包括:在逆时针方向上旋转校准结构的校准板,从而旋转校准板的第一部分朝向微机电陀螺仪的感测质量块以及旋转校准板的第二部分远离微机电陀螺仪的校准电极。
[0104]
根据一个或多个实施例,其中移动校准结构来改变间隙的平均宽度包括:在顺时针方向上旋转校准结构的校准板,从而旋转校准板的第一部分远离微机电陀螺仪的感测质量块以及旋转校准板的第二部分朝向微机电陀螺仪的校准电极。
[0105]
上述各种实施例可以被组合来提供进一步的实施例。根据以上详细描述,可以对实施例进行这些和其他改变。一般而言,在所附权利要求中,所使用的术语不应被解释为将权利要求限于说明书和权利要求中公开的特定实施例,而应被解释为包括权利要求所要求保护的所有可能的实施例以及其等效物的全部范围。因此,权利要求不受本公开内容的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。