1.本公开涉及汽车遮阳板技术领域,特别涉及一种遮阳板的控制方法、装置、设备和存储介质。
背景技术:
2.汽车的遮阳板主要用于遮挡阳光。在汽车行驶过程中,通过对遮阳板进行控制,可以减少阳光干扰目标对象视线。
3.相关技术中,遮阳板的控制方法包括:确定入射光线的第一光线入射角度,第一光线入射角度为入射光线相对于前挡风玻璃的角度,入射光线为从前挡风玻璃入射至车内的光线;根据第一光线入射角度,控制遮阳板。采用该方法控制遮阳板,准确性较低。
技术实现要素:
4.本公开实施例提供了一种遮阳板的控制方法、装置、设备和存储介质,能够提高遮阳板控制的准确性。所述技术方案如下:
5.第一方面,提供了一种遮阳板的控制方法,所述方法包括:确定入射光线的第一光线入射角度和第二光线入射角度,所述第一光线入射角度为入射光线与车辆的纵向中心面之间的角度,所述第二光线入射角度为所述入射光线与所述车辆所在路面之间的角度,所述入射光线为从前挡风玻璃或者侧窗玻璃入射至车内的光线;根据所述第一光线入射角度,确定目标遮阳板绕第一轴线的第一目标偏转角度,所述第一轴线与所述目标遮阳板的纵向中心线平行;根据所述第二光线入射角度,确定所述目标遮阳板绕第二轴线的第二目标偏转角度,所述第二轴线与所述目标遮阳板的横向中心线平行;向目标遮阳板的驱动装置发送第一指示信号,所述第一指示信号用于指示所述目标遮阳板的驱动装置按照所述第一目标偏转角度和所述第二目标偏转角度控制所述目标遮阳板。
6.可选地,所述根据所述第一光线入射角度,确定目标遮阳板绕第一轴线的第一偏转角度,包括:根据所述第一光线入射角度和第一对应关系,确定所述第一光线入射角度对应的所述第一目标偏转角度,所述第一对应关系为所述第一光线入射角度与所述目标遮阳板的第一偏转角度之间的对应关系;在所述第一对应关系中,第一角度区间对应的第一偏转角度大于第二角度区间对应的第一偏转角度,所述第一角度区间的下限值大于或等于所述第二角度区间的上限值。
7.可选地,所述根据所述第一光线入射角度和第一对应关系,确定所述第一光线入射角度对应的所述第一目标偏转角度,包括:响应于确定第一角度差在第一角度范围之内,根据所述第一光线入射角度和所述第一对应关系,确定所述第一光线入射角度对应的所述第一目标偏转角度;所述第一角度差为所述第一光线入射角度和第一视线角度之间的角度差,所述第一视线角度为目标对象的视线与所述车辆纵向中心面之间的角度。
8.可选地,所述根据所述第二光线入射角度,确定所述目标遮阳板绕第二轴线的第二目标偏转角度,包括:根据所述第二光线入射角度和第二对应关系,确定所述第二光线入
射角度对应的所述第二目标偏转角度,所述第二对应关系为所述第二光线入射角度与所述目标遮阳板的第二偏转角度之间的对应关系;在所述第二对应关系中,第三角度区间对应的第二偏转角度大于第四角度区间对应的第二偏转角度,所述第三角度区间的下限值大于或等于所述第四角度区间的上限值。
9.可选地,所述根据所述第二光线入射角度和第二对应关系,确定所述第二光线入射角度对应的所述第二目标偏转角度,包括:响应于确定所述第二角度差在第二角度范围之内,根据所述第二光线入射角度和所述第二对应关系,确定所述第二光线入射角度对应的所述第二目标偏转角度;所述第二角度差为所述第二光线入射角度和第二视线角度之间的角度差,所述第二视线角度为目标对象的视线与所述车辆所在路面之间的角度差。
10.可选地,所述目标遮阳板为第一遮阳板,所述方法还包括:获取副驾驶座位信息;响应于确定所述副驾驶座位信息指示副驾驶座位没人,根据所述第一光线入射角度,确定第二遮阳板绕所述第一轴线的第三目标偏转角度,以及根据所述第二光线入射角度,确定所述第二遮阳板绕所述第二轴线的第四目标偏转角度;向所述第二遮阳板的驱动装置发送第二指示信号,所述第二指示信号用于指示所述第二遮阳板的驱动装置按照所述第三目标偏转角度和所述第四目标偏转角度控制所述第二遮阳板。
11.第二方面,提供了一种遮阳板的控制装置,所述装置包括:第一确定模块,用于确定入射光线的第一光线入射角度和第二光线入射角度,所述第一光线入射角度为入射光线与车辆的纵向中心面之间的角度,所述第二光线入射角度为所述入射光线与所述车辆所在路面之间的角度,所述入射光线为从前挡风玻璃或者侧窗玻璃入射至车内的光线;第二确定模块,用于根据所述第一光线入射角度,确定目标遮阳板绕第一轴线的第一目标偏转角度,所述第一轴线与所述目标遮阳板的纵向中心线平行;第三确定模块,用于根据所述第二光线入射角度,确定所述目标遮阳板绕第二轴线的第二目标偏转角度,所述第二轴线与所述目标遮阳板的横向中心线平行;控制模块,用于向目标遮阳板的驱动装置发送第一指示信号,所述第一指示信号用于指示所述目标遮阳板的驱动装置按照所述第一目标偏转角度和所述第二目标偏转角度控制所述目标遮阳板。
12.可选地,所述第二确定模块用于,根据所述第一光线入射角度和第一对应关系,确定所述第一光线入射角度对应的所述第一目标偏转角度,所述第一对应关系为所述第一光线入射角度与所述目标遮阳板的第一偏转角度之间的对应关系;在所述第一对应关系中,第一角度区间对应的第一偏转角度大于第二角度区间对应的第一偏转角度,所述第一角度区间的下限值大于或等于所述第二角度区间的上限值。
13.可选地,所述第二确定模块用于,响应于确定第一角度差在第一角度范围之内,根据所述第一光线入射角度和所述第一对应关系,确定所述第一光线入射角度对应的所述第一目标偏转角度;所述第一角度差为所述第一光线入射角度和第一视线角度之间的角度差,所述第一视线角度为目标对象的视线与所述车辆纵向中心面之间的角度。
14.可选地,所述第三确定模块用于,根据所述第二光线入射角度和第二对应关系,确定所述第二光线入射角度对应的所述第二目标偏转角度,所述第二对应关系为所述第二光线入射角度与所述目标遮阳板的第二偏转角度之间的对应关系;在所述第二对应关系中,第三角度区间对应的第二偏转角度大于第四角度区间对应的第二偏转角度,所述第三角度区间的下限值大于或等于所述第四角度区间的上限值。
15.可选地,所述第三确定模块用于,响应于确定所述第二角度差在第二角度范围之内,根据所述第二光线入射角度和所述第二对应关系,确定所述第二光线入射角度对应的所述第二目标偏转角度;所述第二角度差为所述第二光线入射角度和第二视线角度之间的角度差,所述第二视线角度为目标对象的视线与所述车辆所在路面之间的角度差。
16.可选地,所述装置还包括获取模块,所述获取模块用于,获取副驾驶座位信息;所述第二确定模块还用于,响应于确定所述副驾驶座位信息指示副驾驶座位没人,根据所述第一光线入射角度,确定第二遮阳板绕所述第一轴线的第三目标偏转角度;所述第三确定模块还用于,根据所述第二光线入射角度,确定所述第二遮阳板绕所述第二轴线的第四目标偏转角度;所述控制模块还用于,向所述第二遮阳板的驱动装置发送第二指示信号,所述第二指示信号用于指示所述第二遮阳板的驱动装置按照所述第三目标偏转角度和所述第四目标偏转角度控制所述第二遮阳板。
17.第三方面,提供了一种计算机设备,包括:处理器;用于存储处理器可执行指令的存储器;其中,所述处理器被配置为执行第一方面所述的方法。
18.第四方面,提供了一种计算机可读介质,当计算机可读介质中的指令由计算机设备的处理器执行时,使得计算机设备能够执行第一方面所述的方法。
19.第五方面,提供了一种计算机程序产品,包括计算机程序/指令,其特征在于,所述计算机程序/指令被处理器执行时实现第一方面所述的方法。
20.本公开实施例提供的技术方案带来的有益效果是:
21.本公开实施例中,第一光线入射角度为入射光线与车辆的纵向中心面之间的角度,第二光线入射角度为入射光线与车辆所在路面之间的角度。当入射光线同时存在第一光线入射角度和第二光线入射角度,也即是,入射光线从前挡风玻璃或者侧窗玻璃斜射入车内时,同时控制目标遮阳板绕第一轴线的偏转角度以及绕第二轴线的偏转角度,第一轴线与目标遮阳板的纵向中心线平行,第二轴线与目标遮阳板的横向中心线平行。这样,目标遮阳板可以更加准确地遮挡入射光线,从而可以提高遮阳板控制的准确性。
附图说明
22.为了更清楚地说明本公开实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
23.图1是本公开实施例提供的一种遮阳板系统的结构示意图;
24.图2是本公开实施例提供的一种第一遮阳板的结构示意图;
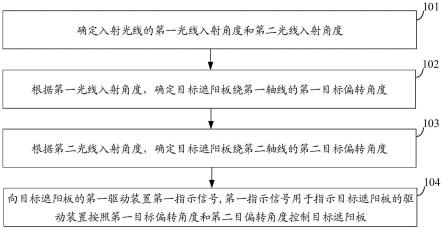
25.图3是本公开实施例提供的一种遮阳板的控制方法的流程图;
26.图4是本公开实施例提供的另一种遮阳板的控制方法的流程图;
27.图5是本公开实施例提供的另一种遮阳板的控制方法的流程图;
28.图6是本公开实施例提供的一种遮阳板的控制装置的结构框图;
29.图7是本公开实施例提供的一种计算机设备的结构框图。
具体实施方式
30.为使本公开的目的、技术方案和优点更加清楚,下面将结合附图对本公开实施方式作进一步地详细描述。
31.图1是本公开实施例提供的一种遮阳板系统的结构示意图。如图1所示,遮阳板系统包括:第一遮阳板11、第二遮阳板12、控制单元20、第一驱动装置31和第二驱动装置32。
32.其中,第一遮阳板11为主驾驶座位对应的遮阳板。第一遮阳板11位于主驾驶座位正前方上端的车顶内侧。第一遮阳板11用于遮挡从前挡风玻璃或者侧窗玻璃入射至车内的光线,避免较强的光线干扰主驾驶员视野。
33.第二遮阳板12为副驾驶座位对应的遮阳板。第二遮阳板12位于副驾驶座位正前方上端的车顶内侧。第二遮阳板12用于遮挡从前挡风玻璃或者侧窗玻璃入射至车内的光线,避免较强的光线干扰副驾驶员视野。
34.示例性地,第一遮阳板11和第二遮阳板12为四向两轴遮阳板。
35.控制单元20的信号输出端分别与第一驱动装置31和第二驱动装置32连接。示例性地,控制单元20为bcm(body control module车身控制模块)或者额外设置的控制器等。
36.第一驱动装置31与第一遮阳板11连接。第二驱动装置32与第二遮阳板12连接。示例性地,第一驱动装置31和第二驱动装置32均包括第一电机和第二电机。第一电机和第二电机为步进电机。
37.控制单元20用于向第一驱动装置31发送指示信号,以指示第一驱动装置31控制第一遮阳板11绕第一轴线偏转和/或绕第二轴线偏转。第一轴线与第一遮阳板11的纵向中心线平行,第二轴线与第一遮阳板12的横向中心线平行。
38.控制单元20还用于向第二驱动装置32发送指示信号,以指示第二驱动装置32控制第二遮阳板12绕第一轴线偏转和/或绕第二轴线偏转。
39.示例性地,指示信号为pwm(pulse width modulation,脉冲宽度调制)信号。
40.图2是本公开实施例提供的一种第一遮阳板的结构示意图,如图2所示,第一轴线a2与第一遮阳板11的纵向中心线a1平行,第二轴线b2与第一遮阳板11的横向中心线b1平行。
41.第一电机311和第二电机312与第一遮阳板11连接。第一电机311用于带动第一遮阳板11绕第一轴线a2转动,第二电机312用于带动第一遮阳板11绕第二轴线b2转动。
42.图3是本公开实施例提供的一种遮阳板的控制方法的流程图,该方法可以由图1中的控制单元20执行,用于控制目标遮阳板。目标遮阳板为第一遮阳板或者第二遮阳板。参见图3,该方法包括:
43.在步骤101中,确定入射光线的第一光线入射角度和第二光线入射角度。
44.第一光线入射角度为入射光线与车辆的纵向中心面之间的角度。第二光线入射角度为第一入射光线与车辆所在路面之间的角度。入射光线为从前挡风玻璃或者侧窗玻璃入射至车内的光线。
45.在步骤102中,根据第一光线入射角度,确定目标遮阳板绕第一轴线的第一目标偏转角度。
46.第一轴线与目标遮阳板的纵向中心线平行。纵向中心线的相关内容,参见图2所示的实施例,在此省略详细描述。
47.在步骤103中,根据第二光线入射角度,确定目标遮阳板绕第二轴线的第二目标偏转角度。
48.第二轴线与目标遮阳板的横向中心线平行。横向中心线的相关内容,参见图2所示的实施例,在此省略详细描述。
49.在步骤104中,向目标遮阳板的第一驱动装置第一指示信号。
50.第一指示信号用于指示目标遮阳板的驱动装置按照第一目标偏转角度和第二目标偏转角度控制目标遮阳板。
51.本公开实施例中,第一光线入射角度为入射光线与车辆的纵向中心面之间的角度,第二光线入射角度为入射光线与车辆所在路面之间的角度。当入射光线同时存在第一光线入射角度和第二光线入射角度,也即是,入射光线从前挡风玻璃或者侧窗玻璃斜射入车内时,同时控制目标遮阳板绕第一轴线的偏转角度以及绕第二轴线的偏转角度,第一轴线与目标遮阳板的纵向中心线平行,第二轴线与目标遮阳板的横向中心线平行。这样,目标遮阳板可以更加准确地遮挡入射光线,从而可以提高遮阳板控制的准确性。
52.图4是本公开实施例提供的另一种遮阳板的控制方法的流程图,该方法可以由图1中的控制单元20执行,用于控制车辆的目标遮阳板。目标遮阳板为第一遮阳板或者第二遮阳板。
53.参见图4,该方法包括:
54.在步骤201中,确定入射光线的第一光线入射角度和第二光线入射角度。
55.其中,入射光线为从前挡风玻璃入射至车内的光线,或者,入射光线为从侧窗玻璃入射至车内的光线。
56.第一光线入射角度为入射光线与车辆的纵向中心面之间的角度。第二光线入射角度为入射光线与车辆所在路面之间的角度。
57.在一些实施方式中,控制单元可以通过第一检测单元确定入射光线的入射方向。第一检测单元的信号输出端与控制单元的信号输入端连接。
58.在一些示例中,第一检测单元为360
°
全景摄像头。示例性地,360
°
全景摄像头设置在车辆的车头位置。
59.360
°
全景摄像头中包括多个光敏元件,例如,包括4个光敏元件或者8个光敏元件。360
°
全景摄像头将多个光敏元件检测到的光照强度信号传输至控制单元。控制单元用于根据多个光敏元件检测到的光照强度信号的强度差异,确定入射光线的入射方向。示例性地,控制单元可以将强度最大的光照强度信号对应的方向,确定为入射光线的入射方向。
60.在另一些示例中,第一检测单元为单目摄像头,单目摄像头用于拍摄乘员舱舱图像,并发送至控制单元。示例性地,单目摄像头设置在车辆前挡风玻璃下方。本公开实施例对单目摄像头的具体位置不作限定,只要能拍摄到完整的乘员舱图像即可。
61.控制单元用于将乘员舱图像分割成多个图像区域,并分别识别出多个图像区域对应的亮度;根据多个图像区域的亮度差异,确定出入射光线的入射方向。示例性地,可以将亮度最大的图像区域对应的方向,确定为入射光线的入射方向。
62.在一些实施方式中,控制单元可以根据入射光线的入射方向,确定第一光线入射角度和第二光线入射角度。
63.在一些示例中,控制单元根据车身俯仰角,建立车辆坐标系;在车辆坐标系下,直
接根据入射光线的入射方向计算第一光线入射角度和第二光线入射角度。
64.其中,车身俯仰角指的是车辆的车头相对于水平面向上偏转的角度,或者车辆的车头相对于水平面向下偏转的角度。当车辆的车头相对于水平面向上偏转时,车身俯仰角大于0;当车辆的车头相对于水平面向下偏转时,车身俯仰角小于0。车身俯仰角可以由第二检测单元获取。示例性地,第二检测单元为六轴陀螺仪传感器。
65.车辆坐标系的x轴平行于地面指向车辆前方,y轴指向驾驶员的左侧,z轴通过汽车质心指向上方。
66.在步骤202中,确定第一角度差。
67.第一角度差为第一光线入射角度和第一视线角度之间的角度差。第一视线角度为目标对象的视线与车辆纵向中心面之间的角度。目标对象为主驾驶员或者副驾驶员。
68.本公开实施例中,步骤202包括以下步骤:
69.第一步,获取目标对象的面部图像。
70.示例性地,目标对象的面部图像可以通过第三检测单元获取。第三检测单元可以是摄像头。示例性地,第三检测单元位于车辆仪表盘上方。本公开实施例对第三检测单元的具体位置不作限定,只要能拍摄到目标对象的面部图像即可。
71.第二步,根据目标对象的面部图像,确定出目标对象的视线方向。
72.在一些实施方式中,确定目标对象的视线方向包括:获取目标对象的面部图像中的面部特征信息;根据面部特征信息,建立目标对象的头部姿态模型;根据目标对象的头部姿态模型,确定目标对象的视线方向。
73.示例性地,面部特征信息包括目标对象的眼部特征等。控制单元获取到目标对象的面部特征信息后,可以建立目标对象的头部姿态模型,并且通过建立的头部姿态模型,自动确定出目标对象的视线方向。
74.第三步,根据目标对象的视线方向,确定第一视线角度。
75.示例性地,控制单元可以根据目标对象的视线方向,自动计算出目标对象的视线与车辆纵向中心面之间的角度差,即第一视线角度。
76.第四步,根据第一光线入射角度和第一视线角度,确定第一角度差。
77.示例性地,将第一光线入射角度减去第一视线角度,得到第一角度差;或者,将第一视线角度减去第一光线入射角度,得到第一角度差。
78.在步骤203中,确定第二角度差。
79.第二角度差为第二光线入射角度和第二视线角度之间的角度差。第二视线角度为目标对象的视线与车辆所在路面之间的角度差。
80.本公开实施例中,步骤203包括以下步骤:根据目标对象的视线方向,确定第二视线角度;根据第二光线入射角度和第二视线角度,确定第二角度差。
81.示例性地,控制单元可以根据目标对象的视线方向,自动计算出目标对象的视线与车辆所在路面之间的角度差,即第二视线角度。
82.将第二光线入射角度减去第二视线角度,得到第二角度差;或者,将第二视线角度减去第二光线入射角度,得到第二角度差。
83.在步骤204中,判断第一角度差是否在第一角度范围内。如果第一角度差在第一角度范围内,则执行步骤205。如果第一角度差在第一角度范围外,则执行步骤206。
84.当第一角度差在第一角度范围内时,表示入射光线可能会射入至目标对象的眼睛,干扰目标对象的视线。此时,需要对目标遮阳板进行控制,以避免入射光线干扰目标对象的视线。
85.当第一角度差在第一角度范围外时,表示入射光线不会射入至目标对象的眼睛,不干扰目标对象的视线或者对目标对象的视线的干扰程度较弱,此时可以不控制目标遮阳板,以减少目标遮阳板的控制次数,提高目标遮阳板的控制的准确性。
86.第一角度范围由相关技术人员根据实验进行确定。示例性地,第一角度范围的下限值为0,第一角度范围的上限值为90
°
、60
°
或者45
°
等。
87.在步骤205中,判断第二角度差是否在第二角度范围内。如果第二角度差在第二角度范围内,则执行步骤207。如果第二角度差在第二角度范围外,则执行步骤206。
88.当第二角度差在第二角度范围内时,表示入射光线可能射入目标对象的眼睛,干扰目标对象的视线。此时,需要对目标遮阳板进行控制,以避免入射光线干扰目标对象的视线。
89.当第二角度差在第二角度范围外时,表示入射光线不会射入目标对象的眼睛,不干扰目标对象的视线或者对目标对象的视线的干扰程度较弱,此时,可以不控制目标遮阳板,以减少目标遮阳板的控制次数,提高目标遮阳板控制的准确性。
90.目标遮阳板为第一遮阳板或者第二遮阳板。目标对象为主驾驶员或者副驾驶员。
91.第二角度范围由相关技术人员根据实验进行确定。第二角度范围与第一角度范围相同或者不同。示例性地,第二角度范围的下限值为0,第二角度范围的上限值为90
°
、60
°
或者45
°
等。
92.在步骤206中,保持目标遮阳板绕第一轴线的第一偏转角度以及绕第二轴线的第二偏转角度不变。
93.可选地,本公开实施例中,步骤202到步骤206为可选步骤,可以不执行步骤202至步骤206,直接执行步骤207。
94.在步骤207中,根据第一光线入射角度,确定目标遮阳板绕第一轴线的第一目标偏转角度。
95.第一光线入射角度的角度范围为-90
°
到90
°
。第一光线入射角度为-90
°
时,入射光线从车辆的右侧窗玻璃射入车内;第一光线入射角度为90
°
时,入射光线从车辆的左侧窗玻璃射入车内。
96.在一些实施方式中,步骤207包括:根据第一光线入射角度和第一对应关系,确定第一光线入射角度对应的第一目标偏转角度。第一对应关系为第一光线入射角度与目标遮阳板绕第一轴线的第一偏转角度之间的对应关系。
97.在第一对应关系中,第一角度区间对应的第一偏转角度大于第二角度区间对应的第一偏转角度,第一角度区间的下限值大于或等于第二角度区间的上限值。第一角度区间和第二角度区间为第一光线入射角度的角度区间。
98.第一遮阳板绕第一轴线的第一偏转角度大于或等于0
°
且小于或等于90
°
。第一遮阳板的第一偏转角度为0
°
时,第一遮阳板位于主驾驶座位正前方,且第一遮阳板所在平面与车辆底面垂直;第一遮阳板的第一偏转角度为90
°
时,第一遮阳板位于左侧窗上方,且第一遮阳板所在平面与车辆底面垂直。
99.在一些示例中,目标遮阳板为第一遮阳板。第一对应关系中,第一角度区间的上限值为90
°
,第一角度区间的下限值为第一角度阈值。第二角度区间的上限值为第一角度阈值,第二角度区间的下限值为-90
°
。第一角度阈值大于0
°
且小于90
°
。示例性地,第一角度阈值为60
°
。
100.第一角度区间对应的第一遮阳板的第一偏转角度为90
°
。第二角度区间对应的第一遮阳板的第一偏转角度为0
°
。
101.第二遮阳板绕第一轴线的第一偏转角度大于或等于-90
°
且小于或等于0
°
第二遮阳板的第一偏转角度为0
°
时,第二遮阳板位于副驾驶座位正前方,且第二遮阳板所在平面与车辆底面垂直;第二遮阳板的第一偏转角度为-90
°
时,第二遮阳板位于右侧窗上方,且第二遮阳板所在平面与车辆底面垂直。
102.在另一些示例中,目标遮阳板为第二遮阳板。第一对应关系中,第一角度区间的上限值为90
°
,第一角度区间的下限值为第二角度阈值。第二角度区间的上限值为第二角度阈值,第二角度区间的下限值为-90
°
。第二角度阈值大于-90
°
且小于0
°
。示例性地,第二角度阈值为-60
°
。
103.第一角度区间对应的第二遮阳板的第一偏转角度为0
°
。第二角度区间对应的第二遮阳板的第一偏转角度为-90
°
。
104.示例性地,第一对应关系根据实际需要进行设置,然后存储在控制单元的存储单元中。
105.在步骤208中,根据第二光线入射角度,确定目标遮阳板绕第二轴线的第二目标偏转角度。
106.第二光线入射角度的角度范围为0
°
到90
°
。第二光线入射角度为0
°
时,入射光线与车辆的纵向中心线平行;第二光线入射角度为90
°
时,入射光线与车辆的纵向中心线垂直且与车辆的横向中心线垂直。
107.在一些实施方式中,步骤208包括:根据第二光线入射角度和第二对应关系,确定第二光线入射角度对应的第二目标偏转角度。第二对应关系为第二光线入射角度与目标遮阳板绕第二轴线的第二偏转角度之间的对应关系。
108.第二对应关系中,第三角度区间对应的第二偏转角度大于第四角度区间对应的第二偏转角度,第三角度区间的下限值大于或等于第四角度区间的上限值。第三角度区间和第四角度区间为第二光线入射角度的角度区间。
109.目标遮阳板绕第二轴线的第二偏转角度大于或等于0
°
且小于或等于第三角度阈值
°
。目标遮阳板的第二偏转角度为0
°
时,目标遮阳板所在平面与车辆底面平行;目标遮阳板的第二偏转角度为90
°
时,目标遮阳板所在平面与车辆底面垂直;目标遮阳板的第二偏转角度为第三角度阈值时,目标遮阳板与前挡风玻璃接触。第三角度阈值大于90
°
。示例性地,第三角度阈值为120
°
、135
°
或者150
°
等。示例性地,不同车型对应的第三角度阈值不同,控制单元中当前车辆的第三角度阈值。
110.在一些示例中,第二对应关系中,不同的第二光线入射角度对应不同的目标遮阳板的第二偏转角度。
111.在另一些示例中,第二对应关系中,不同的第二光线入射角度区间对应不同的目标遮阳板的第二偏转角度。
112.例如,第三角度区间的上限值为90
°
,第三角度区间的下限值为60
°
。第四角度区间的上限值为30
°
,第四角度区间的下限值为0
°
。第一角度区间对应的目标遮阳板的第二偏转角度为150
°
。第二角度区间对应的目标遮阳板的第二偏转角度为90
°
。
113.示例性地,第二对应关系根据实际需要进行设置,然后存储在控制单元中。
114.在步骤209中,向目标遮阳板的驱动装置发送第一指示信号。
115.示例性地,目标遮阳板为第一遮阳板,则第一指示信号指示第一驱动装置按照第一目标偏转角度和第二目标偏转角度控制第一遮阳板。或者,目标遮阳板为第二遮阳板,则第一指示信号指示第二驱动装置按照第一目标偏转角度和第二目标偏转角度控制第二遮阳板。
116.第一驱动装置和第二驱动装置的相关内容,参加图1所示的实施例,在此省略详细描述。
117.本公开实施例中,根据第一光线入射角度和第一视线角度,确定第一角度差,以及根据第二光线入射角度和第二视线角度,确定第二角度差。当第一角度差在第一角度范围内且第二角度差在第二角度范围内时,根据第一光线入射角度和第一对应关系,控制目标遮阳板绕第一轴线的第一目标偏转角度,以及根据第二光线入射角度和第二对应关系,控制目标遮阳板绕第二轴线的第二目标偏转角度。这样,当光线斜射入车辆时,可以避免入射光线斜射入目标对象的眼睛,影响目标对象的视线,提高了目标遮阳板控制的准确性。当第一角度差在第一角度范围外或者第二角度差在第二角度范围外时,保持目标遮阳板绕第一轴线的第一目标偏转角度和绕第二轴线的第二目标偏转角度不变,即不控制目标遮阳板。这样,可以减少目标遮阳板的控制次数,进一步提高了目标遮阳板控制的准确性。
118.可选地,在执行步骤201或者301之前,还包括以下步骤:获取入射光线的光照强度;判断入射光线的光照强度是否大于或等于光照强度阈值。如果入射光线的光照强度大于或等于光照强度阈值,则执行步骤201或者步骤301;如果入射光线的光照强度小于光照强度阈值,则不执行步骤201或者步骤301。
119.示例性地,第一入射光线的光照强度可以通过前述的第一检测单元获取。
120.当入射光线的光照强度大于或等于光照强度阈值时,表示入射光线的光照强度较强,射入人眼时会干扰的驾驶员的视线。当入射光线的光照强度小于光照强度阈值时,表示入射光线的光照强度较弱,射入人眼时不会干扰驾驶员的视线。
121.示例性地,光照强度阈值可以由相关技术人员根据实际需要进行确定。
122.当光照强度达到光照强度阈值时,再对遮阳板进行控制,可以减少遮阳板的控制次数,节约车辆电能。
123.图5是本公开实施例提供的另一种遮阳板的控制方法的流程图。该方法采用图4所示的遮阳板的控制方法控制第一遮阳板。与图4所示的方法相比,该方法还包括:
124.在步骤301中,获取副驾驶座位信息。
125.副驾驶座位信息用于指示副驾驶座位是否有人。
126.在一些示例中,副驾驶座位信息为副驾驶座位图像,或者,副驾驶座位受到的压力。
127.示例性地,副驾驶座位图像可以通过前述步骤202中的第三检测单元获取。副驾驶座位受到的压力可以通过副驾驶座位上安装的压力检测装置获取。
128.在步骤302中,响应于确定副驾驶座位信息指示副驾驶座位有人,根据第一光线入射角度,确定第二遮阳板绕第一轴线的第三目标偏转角度,以及,根据第二光线入射角度,确定第二遮阳板绕第二轴线的第四目标偏转角度。
129.在一些示例中,当副驾驶座位信息为副驾驶座位图像时,控制单元可以根据图像识别算法,识别出副驾驶座位是否有人。
130.在另一些示例中,当副驾驶座位信息为副驾驶座位受到的压力时,当副驾驶座位受到的压力大于或等于压力阈值时,控制单元确定副驾驶座位有人;当主驾驶座位受到的压力小于压力阈值时,控制单元确定副驾驶座位无人。示例性地,压力阈值由相关技术人员根据实际需要确定,然后存储在控制单元的存储单元中。
131.在一些实施方式中,根据第一光线入射角度,确定第二遮阳板绕第三轴线的第三目标偏转角度,包括:根据第一光线入射角度和第三对应关系,确定第一光线入射角度对应的第二遮阳板的第三目标偏转角度。第三对应关系为第一光线入射角度与第二遮阳板绕第一轴线的第三偏转角度之间的对应关系。
132.第三对应关系中,第二遮阳板的第三偏转角度为设定值。示例性地,设定值为0
°
,即第二遮阳板所在平面与车辆底面垂直。
133.当入射光线的第一光线入射角度大于-90
°
且小于或等于0
°
时,此时,即使调节第一遮阳板,入射光线也会对主驾驶员的视线产生一定程度的干扰,此时,控制第二遮阳板的第三偏转角度为设定值,可以减少入射光线对主驾驶员视线的影响,进一步提高了第二目标遮阳板控制的准确性。
134.在一些实施方式中,根据第二光线入射角度,确定第二遮阳板绕第二轴线的第四目标偏转角度包括:根据第二光线入射角度和第二对应关系,确定第二光线入射角度对应第二遮阳板的第四目标偏转角度。第二对应关系的相关内容,参见前述步骤208,在此省略详细描述。
135.在步骤303中,向第二遮阳板的第二驱动装置发送第二指示信号。
136.第二指示信号用于指示第二驱动装置按照第三目标偏转角度和第四目标偏转角度控制第二遮阳板。第二遮阳板绕第一轴线偏转到第三目标偏转角度,以及绕第二轴线偏转到第四目标偏转角度。
137.可选地,本公开实施例中,当副驾驶座位信息指示副驾驶座位有人时,按照图4所述的遮阳板的控制方法,同时控制第一遮阳板和第二遮阳板。
138.本公开实施例中,当副驾驶座位无人时,根据第一光线入射角度和第三对应关系,控制第二遮阳板绕第一轴线的第三目标偏转角度,以及根据第二光线入射角度和第二对应关系,控制第二遮阳板绕第二轴线的第四目标偏转角度。这样,当入射光线从前挡风玻璃或者侧窗玻璃射入车辆时,可以避免入射光线射入主驾驶员的眼睛,进一步提高了第一遮阳板和第二遮阳板控制的准确性。
139.图6是本公开实施例提供的一种遮阳板的控制装置600的结构框图。如图6所示,该装置包括:第一确定模块601、第二确定模块602、第三确定模块603和控制模块604。
140.第一确定模块601,用于确定入射光线的第一光线入射角度和第二光线入射角度,所述第一光线入射角度为入射光线与车辆的纵向中心面之间的角度,所述第二光线入射角度为所述入射光线与所述车辆所在路面之间的角度,所述入射光线为从前挡风玻璃或者侧
窗玻璃入射至车内的光线。第二确定模块602,用于根据所述第一光线入射角度,确定目标遮阳板绕第一轴线的第一目标偏转角度,所述第一轴线与所述目标遮阳板的纵向中心线平行。第三确定模块603,用于根据所述第二光线入射角度,确定所述目标遮阳板绕第二轴线的第二目标偏转角度,所述第二轴线与所述目标遮阳板的横向中心线平行。控制模块604,用于向目标遮阳板的驱动装置发送第一指示信号,所述第一指示信号用于指示所述目标遮阳板的驱动装置按照所述第一目标偏转角度和所述第二目标偏转角度控制所述目标遮阳板。
141.可选地,所述第二确定模块602用于,根据所述第一光线入射角度和第一对应关系,确定所述第一光线入射角度对应的所述第一目标偏转角度,所述第一对应关系为所述第一光线入射角度与所述目标遮阳板的第一偏转角度之间的对应关系;在所述第一对应关系中,第一角度区间对应的第一偏转角度大于第二角度区间对应的第一偏转角度,所述第一角度区间的下限值大于或等于所述第二角度区间的上限值。
142.可选地,所述第二确定模块602用于,响应于确定第一角度差在第一角度范围之内,根据所述第一光线入射角度和所述第一对应关系,确定所述第一光线入射角度对应的所述第一目标偏转角度;所述第一角度差为所述第一光线入射角度和第一视线角度之间的角度差,所述第一视线角度为目标对象的视线与所述车辆纵向中心面之间的角度。
143.可选地,所述第三确定模块603用于,根据所述第二光线入射角度和第二对应关系,确定所述第二光线入射角度对应的所述第二目标偏转角度,所述第二对应关系为所述第二光线入射角度与所述目标遮阳板的第二偏转角度之间的对应关系;在所述第二对应关系中,第三角度区间对应的第二偏转角度大于第四角度区间对应的第二偏转角度,所述第三角度区间的下限值大于或等于所述第四角度区间的上限值。
144.可选地,所述第三确定模块603用于,响应于确定所述第二角度差在第二角度范围之内,根据所述第二光线入射角度和所述第二对应关系,确定所述第二光线入射角度对应的所述第二目标偏转角度;所述第二角度差为所述第二光线入射角度和第二视线角度之间的角度差,所述第二视线角度为目标对象的视线与所述车辆所在路面之间的角度差。
145.可选地,所述装置还包括获取模块605,所述获取模块605用于,获取副驾驶座位信息;所述第二确定模块602还用于,响应于确定所述副驾驶座位信息指示副驾驶座位没人,根据所述第一光线入射角度,确定第二遮阳板绕所述第一轴线的第三目标偏转角度;所述第三确定模块603还用于,根据所述第二光线入射角度,确定所述第二遮阳板绕所述第二轴线的第四目标偏转角度;所述控制模块604还用于,向所述第二遮阳板的驱动装置发送第二指示信号,所述第二指示信号用于指示所述第二遮阳板的驱动装置按照所述第三目标偏转角度和所述第四目标偏转角度控制所述第二遮阳板。
146.需要说明的是:上述实施例提供的遮阳板的控制装置在确定遮阳板的偏转角度时,仅以上述各功能模块的划分进行举例说明,实际应用中,可以根据需要而将上述功能分配由不同的功能模块完成,即将设备的内部结构划分成不同的功能模块,以完成以上描述的全部或者部分功能。另外,上述实施例提供的遮阳板的控制装置与遮阳板的控制方法实施例属于同一构思,其具体实现过程详见方法实施例,这里不再赘述。
147.图7是本公开实施例提供的计算机设备的结构框图。如图7所示,该计算机设备700包括:处理器701和存储器702。
148.处理器701可以包括一个或多个处理核心,比如7核心处理器、7核心处理器等。处理器701可以采用dsp(digital signal processing,数字信号处理)、fpga(field-programmable gate array,现场可编程门阵列)、pla(programmable logic array,可编程逻辑阵列)中的至少一种硬件形式来实现。处理器701也可以包括主处理器和协处理器,主处理器是用于对在唤醒状态下的数据进行处理的处理器,也称cpu(central processing unit,中央处理器);协处理器是用于对在待机状态下的数据进行处理的低功耗处理器。在一些实施例中,处理器701可以在集成有gpu(graphics processing unit,图像处理器),gpu用于负责显示屏所需要显示的内容的渲染和绘制。一些实施例中,处理器701还可以包括ai(artificial intelligence,人工智能)处理器,该ai处理器用于处理有关机器学习的计算操作。
149.存储器702可以包括一个或多个计算机可读介质,该计算机可读介质可以是非暂态的。存储器702还可包括高速随机存取存储器,以及非易失性存储器,比如一个或多个磁盘存储设备、闪存存储设备。在一些实施例中,存储器702中的非暂态的计算机可读介质用于存储至少一个指令,该至少一个指令用于被处理器701所执行以实现本公开实施例中提供的遮阳板的控制方法。
150.本领域技术人员可以理解,图7中示出的结构并不构成对计算机设备700的限定,可以包括比图示更多或更少的组件,或者组合某些组件,或者采用不同的组件布置。
151.本公开实施例还提供了一种非临时性计算机可读介质,当介质中的指令由计算机设备700的处理器执行时,使得计算机设备700能够执行本公开实施例中提供的遮阳板的控制方法。
152.本公开实施例还提供了一种计算机程序产品,包括计算机程序/指令,计算机程序/指令被处理器执行时实现本公开实施例中提供的遮阳板的控制方法。
153.以上仅为本公开的可选实施例,并不用以限制本公开,凡在本公开的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本公开的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。