技术特征:
1.一种服务机器人,其特征在于,所述服务机器人包括存储器、处理器、机器人本体、机械臂和相机,所述存储器中存储有可在所述处理器上运行的计算机可读指令,所述处理器用于执行所述计算机可读指令时实现如下步骤:在所述服务机器人移动至配送起点后,获取所述相机采集的起点区域图像,所述起点区域图像包含目标物品的图像;根据所述起点区域图像确认所述目标物品的位置,并控制所述机械臂将所述目标物品放置于所述机器人本体;在所述服务机器人移动至配送终点后,获取所述相机采集的终点区域图像,所述终点区域图像包含物品待摆放区域;根据所述目标物品的信息判断所述物品待摆放区域是否具有用于放置所述目标物品的空闲区域;若所述物品待摆放区域具有用于放置所述目标物品的所述空闲区域,通过所述机械臂将所述目标物品放置于所述空闲区域。2.根据权利要求1所述的服务机器人,其特征在于,所述处理器用于执行所述计算机可读指令时还实现如下步骤:若所述物品待摆放区域不具有用于放置所述目标物品的所述空闲区域,通过所述机械臂对所述物品待摆放区域的物品的位置进行调整,直至所述物品待摆放区域具有用于放置所述目标物品的空闲区域,通过所述机械臂将所述目标物品放置于所述空闲区域。3.根据权利要求1所述的服务机器人,其特征在于,所述相机包括设置于所述机械臂的第一相机,以及设置于所述机器人本体的第二相机;所述第一相机的视场角小于所述第二相机的视场角;相应的,所述处理器实现获取所述相机采集的起点区域图像的步骤包括:利用所述第一相机在所述配送起点采集第一环境图像;判断所述第一环境图像中是否包括所述目标物品;若是,将所述第一环境图像设置为所述起点区域图像;若否,利用所述第二相机在所述配送起点采集第二环境图像,根据所述第一环境图像和所述第二环境图像确定第一朝向偏差信息,并根据所述第一朝向偏差信息调整所述机械臂的位姿以使所述第一相机的拍摄区域包括所述目标物品,并将所述第一相机采集的新的第一环境图像设置为所述起点区域图像。4.根据权利要求3所述的服务机器人,其特征在于,所述根据所述第一环境图像和所述第二环境图像确定第一朝向偏差信息,包括:确定所述第一环境图像和所述第二环境图像中的相似区域,根据相似区域分别在所述第一环境图像和所述第二环境图像中的位置确定所述第一朝向偏差信息。5.根据权利要求1所述的服务机器人,其特征在于,所述相机包括设置于所述机械臂的第一相机,以及设置于所述机器人本体的第二相机;所述第一相机的视场角小于所述第二相机的视场角;相应的,所述处理器实现获取所述相机采集的起点区域图像的步骤包括:利用所述第二相机在所述配送起点采集第二环境图像;根据所述目标物品在所述第二环境图像中的位置调整所述机械臂的位姿以使所述第
一相机的拍摄区域包括所述目标物品,将所述第一相机采集的第一环境图像设置为所述起点区域图像。6.根据权利要求1所述的服务机器人,其特征在于,所述相机包括设置于所述机械臂的第一相机,以及设置于所述机器人本体的第二相机;所述第一相机的视场角小于所述第二相机的视场角;相应的,所述处理器实现获取所述相机采集的终点区域图像的步骤包括:利用所述第一相机在所述配送终点采集第三环境图像;判断所述第三环境图像中是否包括物品待摆放区域;若是,将所述第三环境图像设置为所述终点区域图像;若否,利用所述第二相机在所述配送终点采集第四环境图像,根据所述第三环境图像和所述第四环境图像确定第二朝向偏差信息,并根据所述第二朝向偏差信息调整所述机械臂的位姿以使所述第一相机的拍摄区域包括所述物品待摆放区域,并将所述第一相机采集的新的第三环境图像设置为所述终点区域图像。7.根据权利要求6所述的服务机器人,其特征在于,所述根据所述第三环境图像和所述第四环境图像确定第二朝向偏差信息,包括:确定所述第三环境图像和所述第四环境图像中的相似区域,根据相似区域分别在所述第三环境图像和所述第四环境图像中的位置确定所述第二朝向偏差信息。8.根据权利要求1所述的服务机器人,其特征在于,所述相机包括设置于所述机械臂的第一相机,以及设置于所述机器人本体的第二相机;所述第一相机的视场角小于所述第二相机的视场角;相应的,所述处理器实现获取所述相机采集的终点区域图像的步骤包括:利用所述第二相机在所述配送终点采集第四环境图像;根据所述物品待摆放区域在所述第四环境图像中的位置调整所述机械臂的位姿以使所述第一相机的拍摄区域包括所述物品待摆放区域,将所述第一相机采集的第三环境图像设置为所述终点区域图像。9.根据权利要求1所述的服务机器人,其特征在于,所述处理器用于执行所述计算机可读指令时还实现如下步骤:在控制所述服务机器人运动至所述配送起点之前,接收物品配送指令,并根据所述物品配送指令确定所述配送起点和所述配送终点。10.根据权利要求1至9任一项所述的服务机器人,其特征在于,所述控制所述机械臂将所述目标物品放置于所述机器人本体的步骤包括:确定所述目标物品的抓取参数;根据所述抓取参数确定所述机械臂的运动轨迹和抓取位姿;控制所述机械臂按照所述运动轨迹和所述抓取位姿将所述目标物品放置于所述机器人本体。11.根据权利要求10所述的服务机器人,其特征在于,所述根据所述抓取参数确定所述机械臂的运动轨迹的步骤包括:将所述抓取参数输入预设功能包,以便所述预设功能包进行避障轨迹规划得到所述机械臂的运动轨迹。
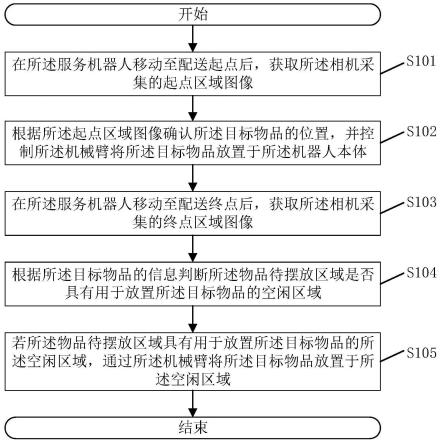
12.一种服务机器人控制方法,其特征在于,所述服务机器人包括机器人本体、机械臂和相机,所述服务机器人控制方法包括:在所述服务机器人移动至配送起点后,获取所述相机采集的起点区域图像,所述起点区域图像包含目标物品的图像;根据所述起点区域图像确认所述目标物品的位置,并控制所述机械臂将所述目标物品放置于所述机器人本体;在所述服务机器人移动至配送终点后,获取所述相机采集的终点区域图像,所述终点区域图像包含物品待摆放区域;根据所述目标物品的信息判断所述物品待摆放区域是否具有用于放置所述目标物品的空闲区域;若所述物品待摆放区域具有用于放置所述目标物品的所述空闲区域,通过所述机械臂将所述目标物品放置于所述空闲区域。13.一种服务机器人控制系统,其特征在于,所述服务机器人包括机器人本体、机械臂和相机,所述服务机器人控制系统包括:起点图像采集模块,用于在所述服务机器人移动至配送起点后,获取所述相机采集的起点区域图像,所述起点区域图像包含目标物品的图像;第一物品放置模块,用于根据所述起点区域图像确认所述目标物品的位置,并控制所述机械臂将所述目标物品放置于所述机器人本体;终点图像采集模块,用于在所述服务机器人移动至配送终点后,获取所述相机采集的终点区域图像,所述终点区域图像包含物品待摆放区域;第二物品放置模块,用于根据所述目标物品的信息判断所述物品待摆放区域是否具有用于放置所述目标物品的空闲区域;还用于若所述物品待摆放区域具有用于放置所述目标物品的所述空闲区域,通过所述机械臂将所述目标物品放置于所述空闲区域。14.一种存储介质,其特征在于,所述存储介质中存储有计算机可执行指令,所述计算机可执行指令被处理器加载并执行时,实现如权利要求1至11任一项所述服务机器人所实现的步骤。
技术总结
本申请公开了一种服务机器人,服务机器人包括存储器、处理器、机器人本体、机械臂和相机,处理器用于执行计算机可读指令时实现如下步骤:在服务机器人移动至配送起点后,获取相机采集的起点区域图像;根据起点区域图像确认目标物品的位置,并控制机械臂将目标物品放置于机器人本体;在服务机器人移动至配送终点后,获取相机采集的终点区域图像;判断物品待摆放区域是否具有用于放置目标物品的空闲区域;若物品待摆放区域具有用于放置目标物品的空闲区域,通过机械臂将目标物品放置于空闲区域。本申请能够提高物品配送效率。本申请还公开了一种服务机器人控制方法、一种服务机器人控制系统及一种存储介质,具有以上有益效果。具有以上有益效果。具有以上有益效果。
技术研发人员:鄢烈忠 金毅 闫瑞君
受保护的技术使用者:深圳市普渡科技有限公司
技术研发日:2022.04.02
技术公布日:2022/6/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。