1.本公开涉及一种运输系统、运输方法和非暂时性计算机可读存储介质。
背景技术:
2.日本未审查专利申请公开第2019-119537号(jp 2019-119537 a)公开了一种用于运输货物的运输系统。在jp 2019-119537 a中,自主移动体具有能够电动地锁定和解锁的货物库。当客户将货物存放到货物库中时,货物库被锁定。当自主移动体移动到接收位置时,接收者解锁货物库。
技术实现要素:
3.在这样的运输系统中,希望合适地运输货物(也称作运输物)。此外,通过自主移动体(也称作移动机器人)装载和运输多个运输物能够更有效地进行运输。然而,当移动机器人运输不同运输目的地的多个运输物时,会有接收者错误地接收货物的问题。
4.本公开旨在解决这样的问题,并且提供能够合适地运输运输物的运输系统、运输方法和非暂时性计算机可读存储介质。
5.根据本实施例的运输系统是使用能自主移动的移动机器人运输运输物的运输系统。所述移动机器人运输多个所述运输物。所述运输系统对所述运输物的运输目的地与接收位置不同进行检测。所述运输系统向在所述接收位置处的接收者输出存在不同运输目的地的所述运输物。
6.当关于患者的位置移动的信息被输入到存储患者信息的电子病历系统时,上述运输系统可以基于关于所述位置移动的所述信息来对所述运输目的地与所述接收位置不同进行检测。
7.上述运输系统可以基于附着到所述运输物的ic标签来对所述运输目的地与所述接收位置不同进行检测。
8.在上述运输系统中,当所述运输系统获取到用于完成作为所述运输物的药物的配药的估计配药时间时,所述移动机器人可以根据所述估计配药时间前往拾取所述药物。
9.在上述运输系统中,在检测到所述运输目的地与所述接收位置不同时,所述运输系统可以将所述运输物运输到正确的运输目的地。
10.根据本实施例的运输方法是用于使用能自主移动的移动机器人来运输运输物的运输方法。所述运输方法包括:通过所述移动机器人运输多个所述运输物;对所述运输物的运输目的地与接收位置不同进行检测;并且向存在于所述接收位置处的接收者输出存在不同运输目的地的所述运输物。
11.上述运输方法可以包括:当关于患者的位置移动的信息被输入到存储患者信息的电子病历系统时,基于关于所述位置移动的所述信息来对所述运输目的地与所述接收位置不同进行检测。
12.上述运输方法可以包括:基于附着到所述运输物的ic标签来对所述运输目的地与
所述接收位置不同进行检测。
13.上述运输方法可以包括:当获取到用于完成作为所述运输物的药物的配药的估计配药时间时,由所述移动机器人根据所述估计配药时间前往拾取所述药物。
14.上述运输方法可以包括:在检测到所述运输目的地与所述接收位置不同时,将所述运输物运输到正确的运输目的地。
15.根据本实施例的非暂时性计算机可读存储介质,其存储有程序,所述程序使计算机执行用于使用能自主移动的移动机器人来运输运输物的运输方法。所述运输方法包括:通过所述移动机器人运输多个所述运输物;对所述运输物的运输目的地与接收位置不同进行检测;并且向存在于所述接收位置处的接收者输出存在不同运输目的地的所述运输物。
16.上述非暂时性计算机可读存储介质可以:当关于患者的位置移动的信息被输入到存储患者信息的电子病历系统时,基于关于所述位置移动的所述信息来对所述运输目的地与所述接收位置不同进行检测。
17.上述非暂时性计算机可读存储介质可以:基于附着到所述运输物的ic标签来对所述运输目的地与所述接收位置不同进行检测。
18.在上述非暂时性计算机可读存储介质中,当获取到用于完成作为所述运输物的药物的配药的估计配药时间时,所述移动机器人可以在所述估计配药时间前往拾取所述药物。
19.在上述非暂时性计算机可读存储介质中,在检测到所述运输目的地与所述接收位置不同时,所述程序可以将所述运输物运输到正确的运输目的地。
20.本公开能够提供能够恰当地运输运输物的运输系统、运输方法和非暂时性计算机可读存储介质。
附图说明
21.下面将参照附图描述本发明的示例性实施例的特征、优点以及技术和工业意义,其中,相同的附图标记表示相同的元件,并且其中:
22.图1是示出使用了根据本实施例的移动机器人的系统的整体配置的概念图;
23.图2是根据本实施例的运输系统的控制框图;
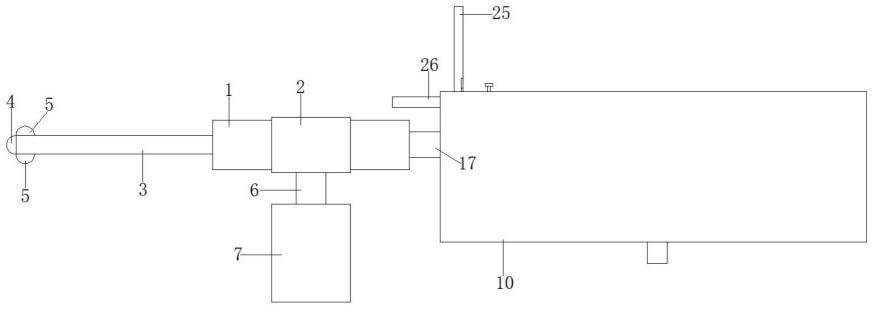
24.图3是示出移动机器人的示例的示意图;
25.图4是示出运输物信息的表格;
26.图5是示出移动机器人的移动路线的示例的图;
27.图6是示出移动机器人的移动路线的另一个示例的图;以及
28.图7是示出根据本实施例的运输方法的流程图。
具体实施方式
29.在下文中,将通过本发明的实施例描述本发明,但是根据权利要求书的范围的发明不限于以下实施例。而且,并非实施例中描述的所有配置都是解决问题不可或缺的手段。
30.示意性配置
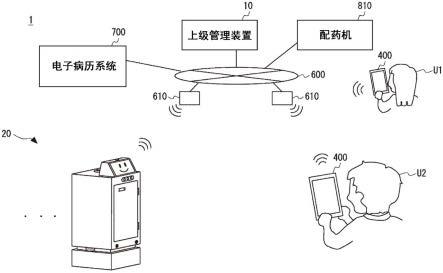
31.图1是示出使用了根据本实施例的移动机器人20的系统1的整体配置的概念图。例如,移动机器人20是将运输物的运输作为任务来执行的运输机器人。移动机器人20为了在
诸如医院、康复中心、护理设施和老年人护理设施的医疗福利设施中运输运输物而自主行驶。还能够在诸如购物中心的商业设施中使用根据本实施例的系统1。
32.用户u1将运输物存放在移动机器人20中并且请求运输。移动机器人20向设定的目的地自主地移动以运输运输物。即,移动机器人20执行货物运输任务(在下文中也简称为任务)。在以下说明中,装载运输物的位置称作运输源,而交付运输物的位置称作运输目的地。
33.例如,假设移动机器人20在具有多个临床科室的综合医院中移动。移动机器人20在多个临床科室间运输设备、消耗品、医疗设备等。例如,移动机器人20将运输物从一个临床科室的护士站递送到另一个临床科室的护士站。可替代地,移动机器人20将运输物从设备和医疗设备的仓库递送到临床科室的护士站。移动机器人20还将在配药科室配的药物递送到计划使用该药物的临床科室或患者。
34.运输物的示例包括药物、诸如包装袋的消耗品、样本、检测仪器、医疗设备、医院餐以及诸如文具的设备。医疗设备包括血压计、输血泵、注射泵、足泵、护士呼叫装置、离床传感器、低压连续吸入器、心电图监视器、药物注射控制器、肠内营养泵、人工呼吸机、袖带压力计、触摸传感器、吸引器、喷雾器、脉搏血氧仪、人工复苏器、无菌装置、回声机等。还可以运输诸如医院餐和检查餐的餐食。此外,移动机器人20可以运输使用过的设备、进食期间使用过的餐具等。当运输目的地位于不同的楼层时,移动机器人20可以使用电梯等进行移动。
35.系统1包括移动机器人20、上级管理装置10、网络600、通信单元610和用户终端400。用户u1或用户u2能够使用用户终端400提出运输物的运输请求。例如,用户终端400是平板电脑、智能手机等。用户终端400仅需是能够无线或有线通信的信息处理装置。
36.在本实施例中,移动机器人20和用户终端400经由网络600连接到上级管理装置10。移动机器人20和用户终端400经由通信单元610连接到网络600。网络600是有线或无线局域网(lan)或广域网(wan)。上级管理装置10通过有线或无线地连接到网络600。例如,通信单元610是安装在每个环境中的无线lan单元。通信单元610可以是通用通信装置,诸如无线路由器。
37.从用户u1或u2的用户终端400发送的各种信号经由网络600被一次发送给上级管理装置10,并且从上级管理装置10发送给目标移动机器人20。类似地,从移动机器人20发送的各种信号经由网络600被一次发送给上级管理装置10,并且从上级管理装置10发送给目标用户终端400。上级管理装置10是连接到各个设备的服务器,并且从各个设备收集数据。上级管理装置10不限于物理的单个装置,可以具有执行分布式处理的多个装置。此外,上级管理装置10可以分布地设置在诸如移动机器人20的边缘装置中。例如,系统1的部分或全部可以安装在移动机器人20中。
38.用户终端400和移动机器人20可以不经过上级管理装置10发送和接收信号。例如,用户终端400和移动机器人20可以通过无线通信直接地发送和接收信号。可替代地,用户终端400和移动机器人20可以经由通信单元610发送和接收信号。
39.用户u1或用户u2通过使用用户终端400请求运输物的运输。在下文中,假设用户u1是在运输源处的运输请求者并且用户u2是在运输目的地(目的地)处的计划接收者来进行说明。不必说,运输目的地处的用户u2也能够提出运输请求。此外,位于运输源或运输目的地以外的位置的用户可以提出运输请求。
40.当用户u1提出运输请求时,用户u1使用用户终端400输入运输物的内容、运输物的
接收地点(在下文中也称作运输源)、运输物的递送目的地(在下文中也称作运输目的地)、到达运输源的估计到达时刻(运输物的接收时刻)、到达运输目的地的估计到达时刻(运输截止时间)等。在下文中,这些类型的信息也称作运输请求信息。用户u1能够通过操作用户终端400的触摸面板来输入运输请求信息。运输源可以是用户u1存在的位置,或运输物的存放位置。运输目的地是计划使用运输物的用户u2或患者存在的位置。
41.用户终端400向上级管理装置10发送由用户u1输入的运输请求信息。上级管理装置10是管理多个移动机器人20的管理系统。上级管理装置10向移动机器人20发送用于执行运输任务的操作指令。上级管理装置10针对每个运输请求确定执行运输任务的移动机器人20。然后,上级管理装置10向移动机器人20发送包括操作指令的控制信号。移动机器人20根据操作指令从运输源移动以便到达运输目的地。
42.例如,上级管理装置10将运输任务分配给在运输源处或运输源附近的移动机器人20。可替代地,上级管理装置10将运输任务分配给正前往运输源或其附近的移动机器人20。被分配了任务的移动机器人20前往运输源以拾取运输物。例如,运输源是请求了任务的用户u1存在的位置。
43.当移动机器人20到达运输源时,用户u1或其他工作人员将运输物装载到移动机器人20上。在运输目的地被设定为目的地的情况下,装载了运输物的移动机器人20自主移动。上级管理装置10向运输目的地处的用户u2的用户终端400发送信号。因此,用户u2能够知道运输物正在被运输和估计到达时刻。当移动机器人20到达设定的运输目的地时,用户u2能够接收存放在移动机器人20中的运输物。以这种方式,移动机器人20执行运输任务。
44.在上述整体配置中,控制系统的各个元件能够被分布到移动机器人20、用户终端400和上级管理装置10以构建作为整体的控制系统。此外,能够将用于实现运输物的运输的实质元件收集在单个装置中以构建运输系统。上级管理装置10控制一个以上的移动机器人20。
45.此外,上级管理装置10与电子病历系统700和配药机810连结。电子病历系统700存储关于患者的信息(也称作患者信息)。例如,当诸如医生或护士的医疗工作者使用用户终端400输入患者信息时,患者信息被存储到电子病历系统700的存储器等中。此外,医疗工作者能够通过用户终端400查看和更新存储在电子病历系统700中的患者信息。
46.配药机810是用于给患者配要使用的药物的装置。配药机810是计量、打包或分类药物的装置或机器人。例如,药剂师操作配药机810来配处方药。由配药机810配的药物被看作是运输物。上级管理装置10、电子病历系统700和配药机810可互相访问。
47.控制框图
48.图2示出了显示系统1的控制系统的控制框图。如图2中所示,系统1包括上级管理装置10、移动机器人20和环境相机300。
49.系统1在使移动机器人20在预定设施中自主移动的同时有效率地控制多个移动机器人20。因此,在设施中安装多个环境相机300。例如,环境相机300安装在设施的通道、走廊、电梯、入口/出口等中。
50.环境相机300获取移动机器人20移动所在的范围的图像。在系统1中,上级管理装置10收集由环境相机300获取的图像和基于图像的信息。可替代地,可以直接向移动机器人发送由环境相机300获取的图像等。环境相机300可以是设置在设施的通道或入口/出口中
的监控相机等。环境相机300可以用来确定设施中的拥挤状况的分布。
51.在根据本实施例的系统1中,上级管理装置10基于运输请求信息执行路线计划。上级管理装置10基于由上级管理装置10创建的路线计划信息为每个移动机器人20指示目的地。然后,移动机器人20朝向由上级管理装置10指定的目的地自主移动。移动机器人20使用设置在移动机器人20自身中的传感器、楼层地图、位置信息等朝向目的地自主地移动。
52.例如,移动机器人20行驶以便不与周围的设备、物体、墙和人(在下文中统称为周边物体)接触。具体地,移动机器人20检测与周边物体的距离并在与周边物体保持一定距离(定义为距离阈值)以上的距离的同时行驶。当与周边物体的距离变得等于或小于距离阈值时,移动机器人20减速或停止。以这种方式,移动机器人20能够不与周边物体接触地行驶。由于能够避免接触,因此能够安全和有效地进行运输。
53.上级管理装置10包括运算处理单元11、存储单元12、缓冲存储器13和通信单元14。运算处理单元11执行用于控制和管理移动机器人20的运算。例如,运算处理单元11能够实施为能够执行程序的装置,诸如计算机的中央处理单元(cpu)。各种功能也能够通过程序实现。在图2中仅示出了作为运算处理单元11的特征的机器人控制单元111、路线计划单元115和检测单元116,但是也可以设置其他处理框。
54.机器人控制单元111执行用于远程控制移动机器人20的运算并生成控制信号。机器人控制单元111基于稍后将描述的路线计划信息125等生成控制信号。此外,机器人控制单元111基于从环境相机300和移动机器人20得到的各种类型的信息来生成控制信号。控制信号可以包括稍后将描述的更新后的信息,诸如楼层地图121、机器人信息123和机器人控制参数122。即,当更新了各种类型的信息时,机器人控制单元111根据更新后的信息生成控制信号。
55.检测单元116对运输物的运输目的地与接收位置不同进行检测。稍后将描述检测单元116的检测处理。
56.路线计划单元115执行用于各个移动机器人20的路线计划。当输入运输任务时,路线计划单元115基于运输请求信息执行用于将运输物运输到运输目的地(目的地)的路线计划。具体地,路线计划单元115参照已经存储在存储单元12中的路线计划信息125、机器人信息123等来确定执行新的运输任务的移动机器人20。起点是移动机器人20的当前位置、前一个运输任务的运输目的地、运输物的接收点等。目的地是运输物的运输目的地、待机位置、充电位置等。
57.这里,路线计划单元115设定从移动机器人20的起点到目的地的通过点。路线计划单元115针对每个移动机器人20设定通过点的通过顺序。例如,通过点设定在分叉点、交叉点、电梯前的大厅及他们的周围。在狭窄通道中,对于移动机器人20来说难以交错通过。在这种情况下,可以将通过点设定在狭窄通道前面的位置。可以预先在楼层地图121中登记通过点的候选。
58.路线计划单元115从多个移动机器人20中确定执行各个运输任务的移动机器人20,使得能够作为整个系统有效地执行任务。路线计划单元115优先将运输任务分配给处于待机的移动机器人20或位于运输源附近的移动机器人20。
59.路线计划单元115针对分配了运输任务的移动机器人20设定包括起点和目的地的通过点。例如,当从运输源到运输目的地有两个以上的移动路线时,设定通过点为使得能够
在更短的时间内执行移动。因此,上级管理装置10基于相机的图像等更新指示通道的拥挤状况的信息。具体地,其他移动机器人20正通过的位置和存在许多人的位置具有高的拥挤度。因此,路线计划单元115设定通过点以便避开拥挤度高的位置。
60.移动机器人20可通过逆时针移动路线或顺时针移动路线而能够移动到目的地。在这种情况下,路线计划单元115设定通过点以便通过较不拥挤的移动路线。路线计划单元115设定至目的地的一个以上的通过点,使得移动机器人20能够沿不拥挤的移动路线移动。例如,当通道在分叉点或交叉点处被划分时,路线计划单元115适当地在分叉点、交叉点、转角和周围设定通过点。从而,能够提高运输效率。
61.路线计划单元115可以考虑电梯的拥挤状况、移动距离等设定通过点。此外,在移动机器人20通过某个位置时的估计时刻,上级管理装置10可以估计移动机器人20的数量和人数。然后,路线计划单元115可以根据估计的拥挤状况设定通过点。此外,路线计划单元115可以根据拥挤状况的变化动态地改变通过点。路线计划单元115为分配了运输任务的移动机器人20按顺序设定通过点。通过点可以包括运输源和运输目的地。如稍后将描述的,移动机器人20自主地移动以便依序地通过由路线计划单元115设定的通过点。
62.存储单元12是存储管理和控制机器人所需的信息的存储单元。在图2的示例中,示出了楼层地图121、机器人信息123、机器人控制参数122、路线计划信息125和运输物信息126,但是存储在存储单元12中的信息可以包括其他信息。运算处理单元11在执行各种处理时使用存储在存储单元12中的信息执行运算。此外,存储在存储单元12中的各种类型的信息能够被更新为最新的信息。
63.楼层地图121是移动机器人20移动所处的设施的地图信息。楼层地图121可以被预先创建,可以根据从移动机器人20得到的信息生成,或可以是通过将根据从移动机器人20得到的信息生成的地图修正信息添加到预先创建的基本地图中而得到的信息。
64.机器人信息123指示由上级管理装置10管理的移动机器人20的id、型号、规格等。机器人信息123可以包括指示移动机器人20的当前位置的位置信息。机器人信息123可以包括关于移动机器人20是正执行任务还是待机中的信息。此外,机器人信息123可以包括指示移动机器人20是操作中还是故障中等的信息。此外,机器人信息123可以包括关于能被运输的运输物和不能被运输的运输物的信息。
65.机器人控制参数122指示由上级管理装置10管理的移动机器人20的诸如与周边物体的阈值距离的控制参数。阈值距离是用于避免与包括人在内的周边物体接触的余量距离。此外,机器人控制参数122可以包括关于操作强度的信息,诸如移动机器人20的移动速度的速度上限值。
66.机器人控制参数122可以根据情况进行更新。机器人控制参数122可以包括指示储存库291的储存空间的可用性和使用状况的信息。机器人控制参数122可以包括关于能够被运输的运输物和不能被运输的运输物的信息。机器人控制参数122与各个移动机器人20的上述各种类型的信息相关联。
67.路线计划信息125包括由路线计划单元115计划的路线计划信息。路线计划信息125例如包括指示运输任务的信息。路线计划信息125可以包括分配了任务的移动机器人20的id、起点、运输物的内容、运输目的地、运输源、到达运输目的地的估计到达时刻、到达运输源的估计到达时刻、到达截止时间等。在路线计划信息125中,上述的各种类型信息可以
与各个运输任务相关联。路线计划信息125可以包括从用户u1输入的运输请求信息的至少一部分。
68.此外,路线计划信息125可以包括针对各个移动机器人20和各个运输任务的关于通过点的信息。例如,路线计划信息125包括指示各个移动机器人20的通过点的通过顺序的信息。路线计划信息125可以包括楼层地图121上各个通过点的坐标和关于移动机器人20是否已经通过通过点的信息。
69.运输物信息126是关于已经提出了运输请求的运输物的信息。例如,运输物信息126包括诸如运输物的内容(类型)、运输源和运输目的地的信息。运输物信息126可以包括负责运输的移动机器人20的id。此外,运输物信息126可以包括指示诸如运输中、运输前(装载前)和运输后的状态的信息。运输物信息126与各个运输物的这些类型的信息相关联。稍后将描述运输物信息126。
70.路线计划单元115参照存储在存储单元12中的各种类型的信息来制定路线计划。例如,路线计划单元115基于楼层地图121、机器人信息123、机器人控制参数122和路线计划信息125来确定执行任务的移动机器人20。然后,路线计划单元115参照楼层地图121等设定到运输目的地的通过点及其通过顺序。预先在楼层地图121中登记通过点的候选。路线计划单元115根据拥挤状况等设定通过点。在连续处理任务的情况下,路线计划单元115可以将运输源和运输目的地设定为通过点。
71.可以给一个运输任务分配两个以上的移动机器人20。例如,当运输物大于移动机器人20的可运输容量时,将一个运输物一分为二并装载到两个移动机器人20上。可替代地,当运输物重于移动机器人20的可运输重量时,将一个运输物一分为二并装载到两个移动机器人20上。以这种方式,能够由两个以上的移动机器人20分担并执行一个运输任务。不必说,当控制不同尺寸的移动机器人20时,可以执行路线计划使得能够运输运输物的移动机器人20接收运输物。
72.此外,一个移动机器人20可以并行执行两个以上的运输任务。例如,一个移动机器人20可以同时装载两个以上的运输物并依序将他们运输到不同的运输目的地。可替代地,在一个移动机器人20正运输一个运输物的同时,可以将另一个运输物装载到该移动机器人20上。而且,在不同位置处装载的运输物的运输目的地可以相同或不同。以这种方式,能够有效地执行任务。
73.在这样的情况下,可以更新指示移动机器人20的储存空间的使用状况或可用性的储存信息。即,上级管理装置10可以管理指示可用性的储存信息并控制移动机器人20。例如,当装载或接收运输物时更新储存信息。当输入运输任务时,上级管理装置10参照储存信息并指示具有装载运输物的空间的移动机器人20来接收运输物。以这种方式,一个移动机器人20能够同时执行多个运输任务,并且两个以上的移动机器人20能够分担并执行运输任务。例如,可以在移动机器人20的储存空间中安装传感器以检测可用性。此外,可以预先登记各个运输物的容量和重量。
74.缓冲存储器13是存储在运算处理单元11的处理中生成的中间信息的存储器。通信单元14是用于与设置在使用系统1的设施中的多个环境相机300和至少一个移动机器人20进行通信的通信接口。通信单元14既能够执行有线通信也能够执行无线通信。例如,通信单元14向各个移动机器人20发送控制移动机器人20所需的控制信号。通信单元14接收由移动
机器人20和环境相机300收集的信息。
75.移动机器人20包括运算处理单元21、存储单元22、通信单元23和接近传感器(例如,距离传感器组24)、相机25、驱动单元26、显示单元27和操作接收单元28。尽管图2仅示出了设置在移动机器人20中的典型的处理框,但是移动机器人20还包括未示出的许多其他处理框。
76.通信单元23是用于与上级管理装置10的通信单元14进行通信的通信接口。通信单元23例如使用无线信号与通信单元14进行通信。距离传感器组24例如是接近传感器并且输出指示与在移动机器人20周围存在的物或人的距离的接近物距离信息。相机25例如拍摄用于掌握移动机器人20的周围情况的图像。例如,相机25还能够拍摄设置在设施的天花板等上的位置标记的图像。通过使用这个位置标记,可以使移动机器人20掌握移动机器人20自己的位置。
77.驱动单元26驱动设置在移动机器人20上的驱动轮。驱动单元26可以包括检测驱动轮及其驱动电机的转数的编码器等。可以基于编码器的输出估计移动机器人20的位置(当前位置)。移动机器人20检测其当前位置并向上级管理装置10发送该信息。
78.显示单元27和操作接收单元28通过触摸面板显示器实现。显示单元27显示用作操作接收单元28的用户界面画面。此外,显示单元27可以显示指示移动机器人20的目的地和移动机器人20的状态的信息。操作接收单元28从用户接收操作。操作接收单元28除包括显示在显示单元27上的用户界面画面外,还包括设置在移动机器人20上的各种开关。
79.运算处理单元21执行用于控制移动机器人20的运算。例如,运算处理单元21能够实施为能够执行程序的装置,诸如计算机的cpu。各种功能还能够由程序实现。运算处理单元21包括移动指令提取单元211、驱动控制单元212和检测单元216。尽管图2仅示出了运算处理单元21中包括的典型的处理框,但是运算处理单元21还包括未示出的处理框。运算处理单元21可以搜索通过点之间的路线。
80.移动指令提取单元211从上级管理装置10给予的控制信号中提取移动指令。例如,移动指令包括关于下一个通过点的信息。例如,控制信号可以包括关于通过点的坐标和通过点的通过顺序的信息。移动指令提取单元211提取这些类型的信息作为移动指令。
81.此外,移动指令可以包括指示向下一个通过点的移动已经变为可能的信息。当通道宽度狭窄时,移动机器人20可能不能交错通过。还有通道暂时无法使用的情况。在这种情况下,控制信号包括使移动机器人20在移动机器人20应该停止的位置之前的通过点处停止的指令。在其他移动机器人已经通过或在通道变得可通过后,上级管理装置10输出向移动机器人20通知移动机器人20已经变为能够移动的控制信号。因此,已经暂时停止的移动机器人20恢复移动。
82.驱动控制单元212基于从移动指令提取单元211给予的移动指令来控制驱动单元26,使得驱动单元26使移动机器人20移动。例如,驱动单元26具有根据来自驱动控制单元212的控制指令值旋转的驱动轮。移动指令提取单元211提取移动指令使得移动机器人20朝向从上级管理装置10接收的通过点移动。驱动单元26旋转地驱动驱动轮。移动机器人20朝向下一个通过点自主移动。以这种方式,移动机器人20依序地通过各通过点以便到达运输目的地。此外,移动机器人20可以估计其位置并且向上级管理装置10发送指示移动机器人20已经通过通过点的信号。因此,上级管理装置10能够管理各个移动机器人20的当前位置
和运输状态。
83.与检测单元116类似,检测单元216对运输物的运输目的地与接收位置不同进行检测。稍后将描述检测单元116的处理。在以下描述中,假设移动机器人20的检测单元216主要独立地执行检测处理,但是上级管理装置10的检测单元116也可以执行检测处理。可替代地,检测单元116和检测单元216可以协作以执行检测处理或分担检测处理。此外,不必设置检测单元116和检测单元216中的至少一个。
84.存储单元22存储楼层地图221、机器人控制参数222和运输物信息226。图2仅示出了存储在存储单元22中的部分信息,并且存储单元22还包括图2中示出的楼层地图221、机器人控制参数222和运输物信息226以外的信息。楼层地图221是移动机器人20移动所处的设施的地图信息。例如,楼层地图221是通过下载上级管理设备10的楼层地图121得到的项目。可以预先创建楼层地图221。此外,楼层地图221可以不是整个设施的地图信息,而可以是包括移动机器人20计划要移动的区域的一部分的地图信息。
85.机器人控制参数222是用于操作移动机器人20的参数。例如,机器人控制参数222包括,与周边物体的距离阈值。机器人控制参数222还包括移动机器人20的速度上限值。
86.与运输物信息126类似,运输物信息226包括关于运输物的信息。运输物信息226包括诸如运输物的内容(类型)、运输源和运输目的地的信息。运输物信息226可以包括指示诸如运输中、运输前(装载前)和运输后的状态的信息。运输物信息226与各个运输物的这些类型的信息相关联。稍后将描述运输物信息126。运输物信息226仅需包括关于由移动机器人20运输的运输物的信息。因此,运输物信息226是运输物信息126的一部分。即,运输物信息226不必包括关于其他移动机器人20执行的运输的信息。
87.驱动控制单元212参照机器人控制参数222并响应于由从距离传感器组24得到的距离信息所指示的距离降低到距离阈值以下的事实来使操作停止或减速。驱动控制单元212控制驱动单元26使得移动机器人20以等于或低于速度上限值的速度行驶。驱动控制单元212限制驱动轮的旋转速度,使得移动机器人20不以等于或高于速度上限值的速度移动。
88.移动机器人20的配置
89.这里,将描述移动机器人20的外观。图3示出移动机器人20的示意图。图3中示出的移动机器人20是移动机器人20的模式中的一个,并且可以是其他形式。在图3中,x方向是移动机器人20的前后方向,y方向是移动机器人20的左右方向,并且z方向是移动机器人20的高度方向。
90.移动机器人20包括主体部290和托架部260。主体部290安装在托架部260上。主体部290和托架部260分别具有长方体的壳体,并且各个部件安装在壳体内部。例如,驱动单元26容纳在托架部260内部。
91.主体部290设置有用作储存空间的储存库291和密封储存库291的门292。储存库291设置有多个货架,并且针对各个货架管理可用性。例如,通过在各个货架中设置各种传感器(诸如重量传感器),能够更新可用性。移动机器人20自主地移动以将储存在储存库291中的运输物运输到由上级管理装置10所指示的目的地。主体部290可以在壳体中包括控制箱等(未示出)。此外,能够利用电子钥匙等将门292锁定。在到达运输目的地时,用户u2利用电子钥匙对门292解锁。可替代地,当移动机器人20到达运输目的地时,门292可以自动地解锁。
92.如图3中所示,前后距离传感器241和左右距离传感器242作为距离传感器组24设置在移动机器人20的外部上。移动机器人20通过前后距离传感器241测量移动机器人20的前后方向上的周边物体的距离。移动机器人20通过左右距离传感器242测量移动机器人20的左右方向上的周边物体的距离。
93.例如,前后距离传感器241设置在主体部290的壳体的前表面和后表面上。左右距离传感器242设置在主体部290的壳体的左侧表面和右侧表面上。例如,前后距离传感器241和左右距离传感器242是超声波距离传感器和激光测距仪。前后距离传感器241和左右距离传感器242检测与周边物体的距离。当前后距离传感器241或左右距离传感器242检测到与周边物体的距离等于或小于距离阈值时,移动机器人20减速或停止。
94.驱动单元26设置有驱动轮261和脚轮262。驱动轮261是用于使移动机器人20向前、向后、向左和向右移动的轮。脚轮262是在没有给予驱动力的情况下跟随驱动轮261转动的从动轮。驱动单元26具有驱动电机(未示出)并驱动驱动轮261。
95.例如,驱动单元26在壳体中支撑两个驱动轮261和两个脚轮262,两个驱动轮261和两个脚轮262中的每个与行驶表面接触。两个驱动轮261布置为使得它们的旋转轴线彼此重合。各个驱动轮261由电机(未示出)独立旋转地驱动。驱动轮261根据来自图2的驱动控制单元212的控制指令值而旋转。脚轮262是从动轮,其被设置为使得从驱动单元26沿竖直方向延伸的转轴在远离车轮的旋转轴线的位置支撑车轮,因此跟随驱动单元26的移动方向。
96.例如,当两个驱动轮261以相同旋转速度在相同方向上旋转时,移动机器人20直行,并且当两个驱动轮261以相同旋转速度在相反方向上旋转时,移动机器人20围绕大致延伸通过两个驱动轮261的中心的竖直轴线枢转。此外,通过在相同方向上并且以不同旋转速度旋转两个驱动轮261,移动机器人20能够在左转和右转的同时前进。例如,通过使左驱动轮261的旋转速度高于右驱动轮261的旋转速度,移动机器人20能够进行右转。相反,通过使右驱动轮261的旋转速度高于左驱动轮261的旋转速度,移动机器人20能够进行左转。即,移动机器人20能够通过控制两个驱动轮261中的每个的旋转方向和旋转速度而在任意方向上直行、枢转、右转和左转等。
97.此外,在移动机器人20中,在主体部290的上表面上设置显示单元27和操作界面281。操作界面281显示在显示单元27上。当用户触摸操作显示在显示单元27上的操作界面281时,操作接收单元28能够接收从用户输入的指示。紧急停止按钮282设置在显示单元27的上表面上。紧急停止按钮282和操作界面281用作操作接收单元28。
98.例如,显示单元27是液晶面板,其将角色的面部显示为图示或以文本或图标的形式呈现关于移动机器人20的信息。通过在显示单元27上显示角色的面部,能够给予周围的观察者显示单元27是伪面部的印象。还能够使用安装在移动机器人20中的显示单元27等作为用户终端400。
99.相机25安装在主体部290的前表面上。这里,两个相机25用作立体相机。即,具有相同视角的两个相机25彼此水平分离地设置。由各个相机25拍摄的图像作为图像数据输出。能够基于两个相机25的图像数据来计算与对象的距离和对象的尺寸。运算处理单元21能够通过分析相机25的图像来检测在移动方向的前方位置处的人、障碍物等。当在行驶方向的前方位置有人或障碍物时,移动机器人20在躲避人或障碍物的同时沿路线移动。相机25的图像数据被发送至上级管理装置10。
100.移动机器人20通过分析由相机25输出的图像数据和由前后距离传感器241和左右距离传感器242输出的检测信号来识别周边物体并确认移动机器人20自身的位置。相机25拍摄移动机器人20在行驶方向前方的图像。如图3中所示,移动机器人20将安装了相机25的一侧视为移动机器人20的正面。即,在正常移动期间,行驶方向是如由箭头所示的移动机器人20的前进方向。
101.运输物信息
102.将参照图4描述运输物信息126。图4是示出运输物信息126的示例的表格。运输物信息126包括运输物的内容、运输源、运输目的地、计划用户、负责运输的机器人id和状态。这些类型的信息与各个运输物相关联。运输物的内容是指示运输物的类型的信息。例如,药物、设备、样本等被输入。运输源指示移动机器人20装载运输物的位置。运输目的地指示运输物的递送目的地。
103.计划用户指示使用运输物的人。例如,计划用户指示患者的姓名或id。可替代地,计划用户可以指示诸如护士或医生的工作人员的姓名或id。不必说,计划用户可以包括关于患者和工作人员二者的信息。能够基于运输请求信息来设定内容、运输源、运输目的地和计划用户。
104.机器人id是负责运输运输物的机器人20的id。基于路线计划设定机器人id。状态是指示是运输物的运输前、运输中或运输后的信息。当移动机器人20装载运输物时以及当完成运输物的接收时,状态被更新。
105.向负责运输运输物的各个移动机器人20发送运输物信息126。例如,移动机器人20的运输物信息226包括关于移动机器人20负责运输的运输物的信息。即,不必向具有机器人id“aaa”的移动机器人20发送对于机器人id“bbb”的运输物的运输物信息。
106.将参照图5描述图4中的“001”和“002”的运输物的运输。这里,在相同的运输源s001处将两个运输物装载到一个移动机器人20上。在这种情况下,两个运输物的运输源s001是配药室800。配药室800设置有图1所示的配药机810。作为药剂师的用户u1为两个运输物提出运输请求。
107.由于两个药物中的每个被不同的计划用户u001和u002使用,所以移动机器人20从运输源s001向不同的运输目的地g001和g002以这样的顺序移动。在移动机器人20在运输源s001处接收到两个运输物后,移动机器人20按运输目的地g001和运输目的地g002的顺序移动。即,移动机器人20从运输源s001经由运输目的地g001移动到运输目的地g002。路线计划单元115响应于运输请求而设定通过点m1到m8。因此,执行路线搜索使得移动机器人20按通过点m1、m2、m3、m4、m5、m6、m7和m8的顺序移动。移动机器人20沿路线r移动。
108.首先,移动机器人20从通过点m1移动到通过点m2。通过点m2是配药室800中的点。用户u1将两个运输物储存到移动机器人20的储存库291中。这里,一个运输物的运输目的地是运输目的地g001,并且另一个运输物的运输目的地是运输目的地g002。
109.运输目的地g001和运输目的地g002是运输物的接收者所在的接收位置。作为接收者的计划用户u001存在于运输目的地g001处。作为接收者的计划用户u002存在于运输目的地g002处。接收者可以是诸如护士的工作人员或可以是患者。在运输目的地g001处,计划用户u001仅需接收两个运输物中的一个。当图3中示出的门292在接收位置处解锁时,计划用户u001可能取出错误的运输物。例如,在作为接收位置的运输目的地g001处,计划用户u001
可能取出“002”的运输物。
110.在本实施例中,运输多个运输物的移动机器人20的检测单元216检测运输物的运输目的地是否与接收位置不同。即,检测单元216针对各个运输物判定接收位置(当前位置)和运输目的地是否匹配。移动机器人20或用户终端400根据检测单元216的检测结果执行输出。当接收位置与运输目的地不同时,向作为接收者的计划用户u001输出指示存在有不同运输目的地的运输物的信息。
111.例如,显示单元27输出警告消息,诸如“请仅取出运输物[001]”,“请不要取出运输物[002]”和“请小心不要取出错误的货物”。该输出可以是通过显示单元27的显示输出,或可以是通过扬声器等的音频输出。此外,执行输出不限于显示单元27,用户终端400可以执行输出。
[0112]
通过根据检测结果由显示单元27等执行输出,能够防止接收者错误地取出不同运输目的地的运输物。这样能够实现恰当的运输,并且能够提高运输效率。此外,根据检测结果执行输出消除了针对具有不同运输目的地的运输物中的每个设置储存库291和门292的需要。由于能够将多个运输物储存在设置有一个门292的一个储存库291中,因此能够抑制移动机器人20的制造成本。
[0113]
检测单元216能够针对各个运输物通过将当前位置与运输物信息226的运输目的地进行比较来执行检测处理。检测单元216可以仅在多个运输物的运输期间执行检测处理。此外,检测单元216能够执行检测何时新储存了具有不同运输目的地的运输物。检测单元216的检测处理可以在到达各个运输物的接收位置时执行,或可以在到达前执行。
[0114]
可替代地,上级管理装置10的检测单元116能够针对各个运输物通过将当前位置与运输物信息126的运输目的地进行比较来执行检测处理。上级管理装置10向具有与接收位置不同的运输目的地的移动机器人20发送控制信号。因此,移动机器人20能够将检测结果通知接收者。不必说,上级管理装置10可以向用户的用户终端400发送检测结果,而不是向移动机器人20发送检测结果。
[0115]
与电子病历系统700的协作
[0116]
此外,在本实施例中,上级管理装置10可以与图1中示出的电子病历系统700协作执行检测处理。例如,在电子病历系统700中,创建并登记关于患者的患者信息。例如,患者信息包括指示患者的位置的位置信息。例如,位置信息指示住院患者的病房或患者接受医疗的临床科室。例如,当患者的情况突然变化时,或当通过检查做出新的诊断时,医生等经由用户终端400将患者的位置移动输入到电子病例系统700中。
[0117]
这里,考虑了将配药室800中配的药物运输给患者的情况。图6是示出移动机器人20在以配药室800作为运输源s001的情况下移动的示例的图。在完成配药的估计完成时刻,移动机器人20前往运输源s001以拾取药物。例如,路线计划单元115执行路线计划以在傍晚将上午检查时已经开出的药物递送给患者。
[0118]
存在如下的情况:在移动机器人20移动到药物的运输目的地之前,作为患者的计划用户u001的位置已经移动。例如,住院患者的病房可以改变。可替代地,患者可以移动到别的临床科室。将关于患者的位置移动的信息输入到电子病历系统700中。例如,医生等使用用户终端400来输入关于患者的位置移动的信息。这里,服药的计划用户u001的病房已经从运输目的地g001移动到运输目的地g002。
[0119]
当医生等将关于患者的位置移动的信息输入到电子病历系统700时,电子病历系统700向上级管理装置10发送关于位置移动的信息。上级管理装置10更新关于患者所在的位置的信息。上级管理装置10基于更新后的信息对运输目的地与接收位置不同进行检测。
[0120]
例如,当上级管理装置10从电子病历系统700获取到关于计划用户u001的位置移动的信息时,上级管理装置10为计划用户u001的运输物搜索运输物信息126。当已经为计划用户u001的运输物执行了路线计划时,检测单元116检测到运输目的地与接收位置不同。上级管理装置10向运输计划用户u001的运输物的移动机器人20和位于接收位置处的用户终端400发送检测结果。移动机器人20或用户终端400输出检测结果。
[0121]
以这种方式,当上级管理装置10从电子病历系统700获取到关于计划用户u001的位置移动的信息时,上级管理装置10更新运输物信息126。然后,检测单元116参照更新后的运输物信息126执行检测处理。因此,基于最新的信息执行检测处理,使得能够提高检测精度。
[0122]
此外,当检测单元216检测到运输目的地与接收位置不同时,移动机器人20可以将运输物运输到正确的运输目的地。如上所述,当更新了计划用户u001的位置信息时,运算处理单元21利用更新后的位置信息更新运输物信息126的运输目的地。在图6中,计划用户u001已经从运输目的地g001移动到运输目的地g002。因此,在运输物信息126中,运输物的运输目的地更新为运输目的地g002。
[0123]
路线计划单元115以更新后的运输目的地g002作为正确的运输目的地来执行路线计划。例如,在图6中,在运输目的地更新前,设定至更新前的运输目的地的通过点m1到m5。当运输目的地更新为运输目的地g002时,路线计划单元115从移动机器人20的路线计划信息125中删除通过点m5。路线计划单元115将通过点m6和m7添加到移动机器人20的路线计划信息125中。尽管计划了移动机器人按通过点m1、m2、m3、m4和m5的顺序移动,但由于路线更新,移动机器人20按通过点m1、m2、m3、m4、m6和m7的顺序移动。
[0124]
此外,上级管理装置10向移动机器人20发送更新后的运输物信息。移动机器人20以更新后的运输目的地作为正确的运输目的地来重新搜索路线r。因此,移动机器人20不在作为更新前的运输目的地的运输目的地g001处停止,而是将运输物运输到作为更新后的运输目的地的运输目的地g002处。即,由于移动机器人20不向通过点m5移动,所以缩短了移动距离。这使得能够更高效率地进行运输。
[0125]
与配药机810的协作
[0126]
此外,在本实施例中,移动机器人20可以与图1中示出的配药机810协作执行运输任务。具体地,上级管理装置10从配药机810获取完成作为运输物的药物的配药的估计配药时间。然后,路线计划单元115执行路线计划使得移动机器人20根据估计配药时间拾取运输物。结果是,移动机器人20能够紧接在估计配药时间之前或之后前往配药机810所位于的运输源s001处以拾取运输物。这能够实现高效的运输。
[0127]
具体地,作为药剂师的用户u1操作配药机810或用户终端400来输入估计配药时间。可替代地,配药机810可以基于配药内容等确定估计配药时间。估计配药时间可以存储为运输物信息126、226。此外,用户u1输入作为计划用户u001的患者的姓名等。因此,移动机器人20根据估计配药时间前往取药。例如,移动机器人20紧接在估计配药时间之后移动到配药室或配药机。然后,用户u1将药物装载到移动机器人20上。因此,能够有效地运输药物。
[0128]
ic标签
[0129]
此外,检测单元216可以基于附着到运输物的ic标签来对运输目的地与接收位置不同进行检测。例如,ic标签可以包括关于使用作为运输物的药物的患者或工作人员的信息。检测单元216基于ic标签中包括的信息执行检测处理。检测单元216和用户终端400可以具有读取ic标签的信息的ic标签读取器。
[0130]
检测单元116或检测单元216根据存储在ic标签中的信息来对运输目的地与接收位置不同进行检测。例如,计划接收者使用ic标签读取器读取ic标签的信息。检测单元216基于ic标签的信息,通过将当前位置与运输目的地进行比较来执行检测处理。然后,显示单元27根据检测结果执行显示。这能够实现恰当的运输。
[0131]
运输方法
[0132]
图7是示出根据本实施例的控制方法的流程图。图7示出了响应于运输请求执行路线计划之后的处理。即,图7示出了移动机器人20沿从上级管理装置10发送的路线移动的处理。
[0133]
首先,移动机器人20运输运输物(s701)。这里,移动机器人20装载两个以上的运输物来执行运输任务。接下来,检测单元116执行检测处理(s702)。如上所述,检测单元116基于各种类型的信息来对运输目的地与接收位置不同进行检测。可替代地,检测单元216可以执行检测处理。
[0134]
然后,移动机器人20或用户终端400输出检测结果(s703)。因此,存在不同运输目的地的运输物的信息被输出给在接收位置处的接收者。能够抑制接收者错误地取出不同运输目的地的运输物。这能够实现恰当的运输。
[0135]
上述上级管理装置10、移动机器人20等中的处理的部分或全部能够实现为计算机程序。这样的程序能够使用各种类型的非暂时性计算机可读介质存储并供应给计算机。非暂时性计算机可读介质包括各种类型的有形记录介质。非暂时性计算机可读介质的示例包括磁记录介质(例如软盘、磁带、硬盘驱动器)、磁光记录介质(例如磁光盘)、只读光盘存储器(cd-rom)、可记录光盘(cd-r)、可重写光盘(cd-r/w)和半导体存储器(例如掩模rom、可编程rom(prom)、可擦prom(eprom)、闪存rom、随机存取存储器(ram))。程序还可以通过各种类型的暂时性计算机可读介质供应给计算机。暂时性计算机可读介质的示例包括电信号、光信号和电磁波。暂时性计算机可读介质能够经由诸如电线和光纤的有线通信路径或无线通信路径将程序供应给计算机。
[0136]
本发明不限于上述实施例,并且在不背离主旨的情况下能够进行恰当的修改。例如,在上述实施例中,描述了运输机器人在医院中自主地移动的系统,但是上述系统可以在旅馆、餐厅、办公楼、活动场所或综合设施中运输作为货物的预定物品。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。