1.本发明属于毫米波太赫兹探测应用技术领域,具体设计一种毫米波太赫兹近场成像装置。
背景技术:
2.在毫米波太赫兹近场成像领域,传统的成像仪器体积比较笨重,只能在固定场合使用,不能满足人们在日常生活生产过程中的检测。在效率方面,现有的毫米波太赫兹成像系统数据量大,对数据吞吐速度有很高的需求,这就导致了检测速度慢,实时解析困难,也额外增加了系统成本。针对以上问题,本发明通过搭建一套近场毫米波太赫兹成像装置,并将其进行小型化和产品化,可以为近场物品探测提供一套精度较高的快速探测装置,同时开发了一套适配系统的客户端程序,方便用户使用。通过算法适配,可以进一步拓展应用范围。
技术实现要素:
3.本发明的目的是为了克服现有技术的不足,提供了一套结构简单、合理快速高效率且成像分辨率高的毫米波太赫兹近场成像装置。
4.本发明解决上述技术问题的具体技术方案如下:一种毫米波太赫兹近场成像装置,包括雷达扫描平台、客户端;所述雷达扫描平台用于探测和数据回传,包括单片机,电机控制器,带电机的二维导轨,电源,雷达传感器,限位传感器;电源与电机控制器连接以供电,单片机与电机控制器相和限位传感器相连以对其进行控制,单片机通过串口与工控机相连以接受客户端指令,雷达传感器通过串口与工控机相连以回传数据,带电机的二维导轨中的电机与电机控制器相连以接受驱动;
5.所述客户端运行在工控机上,分为控制客户端和数据客户端;控制客户端用于对雷达扫描平台进行配置达成探测场景设置和回传数据解析,数据客户端用于历史数据的复现和进一步处理。
6.进一步,电机控制器包括两套电机驱动,用于产生975hz的pwm驱动控制信号,x,y轴电机控制信号,x,y轴电机方向信号,同时给限位传感器供电和读取其状态;所述电机控制器为电机驱动采用共阴极接法,电机控制器的输入电压为24v,用于给电机提供驱动和使能信号。
7.进一步,所述的电源采用acdc模式,输入电压为220v,输出电压分为三路:12v,给工控机供电;24v,用于给电机控制器供电;5v用于给雷达传感器供电。
8.进一步,所述的限位传感器为一对,其工作电压为3.3v,输出为逻辑输出,0表示未触发,1表示触发,用于控制雷达扫描平台初始化的位置,防止扫描平台在工作过程中发生电机卡死现象。
9.进一步,所述雷达传感器的工作方式为线性调频连续波模式,为毫米波太赫兹雷达传感器,工作频率为77ghz,带宽为4ghz,内置dsp用于时域信号预处理,毫米波太赫兹雷
达传感器被固定在滑块上,通过usb串口与工控机相连,用于在各个位置收集回拨数据并回传。
10.进一步,所述控制客户端是基于c#编程语言设计的ui界面,ui大致分为4个参数区域,包括:串口配置区、扫描参数配置区、图像刷新相关参数设置区、进度条显示区;其中,串口配置区可与对不同的数据传输端口进行配置;扫描参数配置区对扫描平台参数进行配置,包括初始化位置,最大步数,采样间隔,目标距离这四个参数;其中图像刷新参数设置区域中参数为图像刷新间隔的采样点数;进度条显示区包含了扫描的实时进度,扫描完成后,会弹出扫描耗时和源数据所在的文件夹。
11.进一步,所述的数据客户端是基于c#编写的ui界面,ui大致分为3个参数区域,包括文件选择区,成像参数设置区,图像处理参数设置区;其中文件选择区是提供给用户选择所需读取的文件;成像参数设置区用于对所需文件的成像参数进行设置;图像处理参数设置区,用于提供给用户选择所需采用的图像滤波方式和阈值。
12.本发明的一种毫米波太赫兹近场成像装置的成像方法,包括以下步骤:
13.1)、客户端对雷达扫描平台进行配置,选中对应的部件串口,连接串口后写入参数,雷达传感器试运行一次,通过雷达天线对正前方一块区域发射调频连续波,并接收回波,确认数据传输稳定性结后系统可以开始探测;
14.2)、启动雷达扫描平台,通过带电机的二维导轨带动毫米波雷达传感器移动,从而使毫米波雷达传感器在各个空间坐标位置进行探测,同时客户端对扫描平台驱动给出的坐标信息和雷达传感器的回传数据进行解析、同步和处理;
15.3)、客户端对回波数据进行收集过程中,会统计雷达回波数据矩阵大小,达到用户设置的数量后,会对成像算法进行调用,并动态刷新当前收集数据的结果;
16.4)、完成数据收集工作后,客户端将数据保存,并调用成像算法动态链接库,显示最终的成像结果,最终成像结果反应了探测区域的散射分布情况。
17.优选的,雷达扫描平台部分包括扫描平台驱动模块、扫描平台结构,扫描平台结构中,主要由x,y方向的两套步进电机和导轨,以及固定在x方向上的滑块,以及两个限位传感器构成,通过12pin接口与扫描平台驱动模块连接,整体采用金属结构,强度高,不易损坏。导轨通过螺丝固定在背部的光学面包板上。
18.本发明工作原理:将空间看作一个笛卡尔坐标系,xoy面为雷达移动的区域,毫米波太赫兹雷达传感器在不同位置对正前方一定范围内的区域发射线性调频连续波,并收集回波信号的时域数据通过板载dsp部件对时域数据进行预处理,并传输成像算法所需的频域数据,通过成像算法动态链接库文件的处理,反演出探测区域的散射分布情况。
19.与现有技术的相比,本发明具有以下特点:
20.(1)、本发明通过毫米波太赫兹雷达传感器发射出调频线性连续波信号,通过收集毫米波太赫兹雷达传感器在不同位置的回波信号频域数据,反演出探测区域的散射情况。
21.(2)、根据不同需求可设置不同的探测场景,满足不同条件下的探测,同时采取图像显示的方式,精度好,检测效率高,搭配不同的增强算法,可以适用于多种应用场合下的探测。
22.(3)、本发明探测装置体积较小,装置构造简单,便携性好,实时处理能力,实用性较强,造价低,能源消耗少。
附图说明
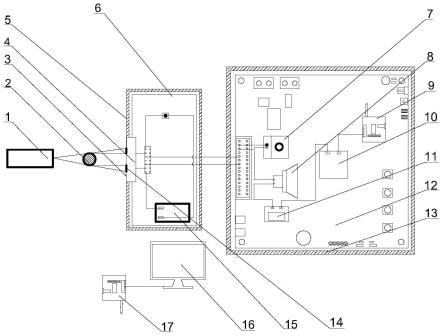
23.图1是实施例1的微波与红外探测成像平台结构示意图。
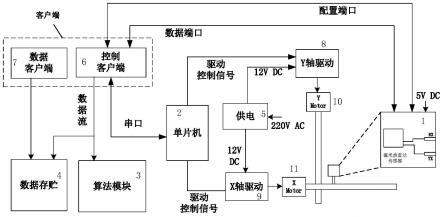
24.图2是实施例1的微波成像工作流程图,
25.图3为毫米波太赫兹近场成像平台结构图
26.图4为毫米波太赫兹近场成像装置工作情况
具体实施方式
27.下面结合附图和实施例对本发明作进一步说明。
28.如图1-4所示的毫米波太赫兹近场成像装置,包括产生线性调频连续波和收集回波的毫米波太赫兹雷达传感器1;用于搭载毫米波太赫兹雷达传感器的电机和导轨10,11;用于给电机驱动信号的单片机2;用于给电机控制器供电的电源5;用于驱动电机转动的电机控制器8,9;用于对单片机进行配置从而实现扫描逻辑,对雷达数据和单片机数据进行同步的控制客户端6;用于存贮数据的数据存贮区4;用于对数据存贮区域历史数据进行重现和追溯的数据客户端7;用于数据处理的成像算法模块3.所述毫米波太赫兹雷达传感器1通过串口与ipc相连接,控制客户端和数据客户端均需要运行在ipc上,单片机2通过串口与ipc相连接,用于实现对电机驱动8,9的控制。
29.优选的,所述单片机2,与电机控制器和限位传感器相连接,用于产生975hz的pwm信号,x,y轴电机控制信号,x,y轴电机方向信号,同时给限位传感器供电和读取其状态。
30.优选的,所述电机控制器8,9,电机控制器采用共阴极接法,电机控制器的输入电压为24v,用于给电机提供驱动和使能信号。通过杜邦线与单片机相连,用于接受其控制。
31.优选的,所述电源为acdc电源5,输入电压为220v,输出电压分为三路:12v,给工控机供电;24v,用于给电机控制器供电;5v用于给雷达传感器供电。
32.优选的,所述一对限位传感器模块,其工作电压为3.3v,输出为逻辑输出,0表示未触发,1表示触发,用于控制扫描平台初始化的位置,防止扫描平台在工作过程中发生电机卡死现象。
33.优选的,所述毫米波太赫兹雷达传感器1的工作方式为线性调频连续波模式,以毫米波传感器为例,工作频率为77ghz,带宽为4ghz,内置dsp用于时域信号预处理,毫米波太赫兹雷达传感器被固定在滑块上,通过usb串口与工控机相连,用于在各个位置收集回拨数据并回传。
34.优选的,所述扫描平台结构10,11,主要由x,y方向的两套步进电机和导轨,以及固定在x方向上的滑块,以及两个限位传感器构成,通过12pin接口与扫描平台驱动模块连接,整体采用金属结构,强度高,不易损坏。导轨通过螺丝固定在背部的光学面包板上。
35.优选的,所述控制客户端6是基于c#编程语言设计的ui界面,ui大致分为4个参数区域,包括:串口配置区、扫描参数配置区、图像刷新相关参数设置区、进度条显示区。其中,串口配置区可与对不同的数据传输端口进行配置;扫描参数配置区对扫描平台参数进行配置,包括初始化位置,最大步数,采样间隔,目标距离这四个参数;其中图像刷新参数设置区域中参数为图像刷新间隔的采样点数;进度条显示区包含了扫描的实时进度,扫描完成后,会弹出扫描耗时和源数据所在的文件夹。
36.优选的,所述数据客户端7是基于c#编写的ui界面,ui大致分为3个参数区域,包括
文件选择区,成像参数设置区,图像处理参数设置区;其中文件选择区是提供给用户选择所需读取的文件;成像参数设置区用于对所需文件的成像参数进行设置;图像处理参数设置区,用于提供给用户选择所需采用的图像滤波方式和阈值。
37.所述的毫米波太赫兹近场成像方法,包括以下步骤,以下提供毫米波成像装置具体装置的使用方法,太赫兹成像装置原理相同,在此不多做赘述:
38.(1)、客户端对雷达扫描平台进行配置,选中对应的部件串口,连接串口后写入参数,毫米波雷达传感器试运行一次,通过雷达天线对正前方一块区域发射调频连续波,并接收回波,确认数据传输稳定性结后系统可以开始探测。
39.(2)、启动扫描平台,通过二维导轨和电机带动毫米波雷达传感器移动,从而使毫米波雷达传感器在各个空间坐标位置进行探测,同时客户端对扫描平台驱动给出的坐标信息和雷达传感器的回传数据进行解析、同步和处理。
40.(3)、客户端对回波数据进行收集过程中,会统计雷达回波数据矩阵大小,达到用户设置的数量后,会对成像算法进行调用,并动态刷新当前收集数据的结果。
41.(4)、完成数据收集工作后,客户端将数据保存,并调用成像算法动态链接库,显示最终的成像结果,最终成像结果反应了探测区域的散射分布情况。
42.综上,本发明公开了一种毫米波太赫兹近场成像装置及成像方法,涉及一种使用合成孔径雷达成像技术实现图像重构的毫米波太赫兹成像平台。该成像系统可用于近场场景探测中,包括:雷达扫描平台、客户端两大部分,雷达扫描平台部分包括一个扫描平台驱动模块、扫描平台结构,雷达扫描平台用于接受客户端的控制和进行扫描探测动作;扫描平台驱动包括一个单片机,用于接收客户端的配置信息,实现对步进电机驱动的控制;扫描平台结构包含两套步进电机和直线导轨,用于搭载毫米波太赫兹雷达传感器进行移动,在各个探测点进行探测;客户端包括控制客户端和数据客户端两个部分,其中控制客户端由c#开发的ui界面和成像算法的动态连接库文件,用于控制整套系统的参数设置,通过串口对回波数据进行收集、存贮和实时处理并反演探测所得的图像;数据客户端包含算法模块和数据追溯功能,用于对历史探测数据的复现。所述的装置结构如下图所示,本发明所产生的图像结果清晰,分辨率高,成像速度快,客户端设计简洁明了。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。