1.本发明涉及飞行器搜索技术领域,更具体地说是一种基于引导信息的高超声速飞行器搜索方法。
背景技术:
2.高超声速飞行器兼具战略威慑和战术打击能力,具有机动性强、航程远、速度快、打击准等特点。随着高超声速技术的不断发展和成熟,“先锋”、“匕首”等高超声速武器陆续列装,临近空间的竞争愈演愈烈,高超声速飞行器也成为空天防御的重点和难点。
3.雷达在对高超声速飞行器进行探测和搜索时,通常希望以最短时间、最大概率捕获到目标,这就需要消耗很多的雷达资源。而雷达通常不仅执行搜索任务,还需要执行跟踪等任务,因此,如何在进行高超声速飞行器搜索时提高搜索效率、优化雷达资源分配是一个重要问题。
4.现有关于雷达目标搜索方面的研究,主要以导弹和常规飞机的搜索为主,通常简单将截获概率最大或者搜索时间最短作为搜索的目标函数,而高超声速飞行器由于机动特性强、飞行空域特殊,其目标特性与常规目标有所区别,目前缺乏专门面向高超声速飞行器搜索方面的公开文献资料。
5.因此,在这种背景下,对高超声速飞行器搜索算法进行研究,有利于优化雷达资源、提高搜索性能。
技术实现要素:
6.本发明的目的是为解决临近空间高超声速飞行器机动性强、飞行空域特殊,单个雷达进行目标搜索时存在搜索效率低、资源消耗大的问题。为了克服现有技术的上述不足,本发明提供一种基于引导信息的高超声速飞行器搜索方法。
7.为实现上述目的,本发明提供如下技术方案:
8.一种基于引导信息的高超声速飞行器搜索方法,步骤如下:
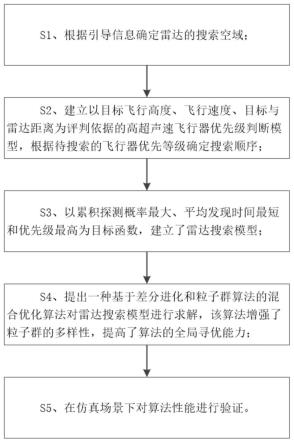
9.s1、根据引导信息确定雷达的搜索空域;
10.s2、建立以目标飞行高度、飞行速度、目标与雷达距离为评判依据的高超声速飞行器优先级判断模型,根据待搜索的飞行器优先等级确定搜索顺序;
11.s3、以累积探测概率最大、平均发现时间最短和优先级最高为目标函数,建立了雷达搜索模型;
12.s4、提出一种基于差分进化和粒子群算法的混合优化算法对雷达搜索模型进行求解,该算法增强了粒子群的多样性,提高了算法的全局寻优能力;
13.s5、在仿真场景下对算法性能进行验证。
14.本发明的技术效果和优点:
15.(1)设计了一种高超声速飞行器优先级判断模型,以目标高度、目标速度和目标距离为指标,给出了具体的量化方法,可以根据目标优先级给威胁程度高的目标分配更多的
搜索资源;
16.(2)在综合考虑了探测概率、驻留时间、总时间资源等约束条件下,建立了以累积探测概率最大、平均发现时间最短和优先级最高为目标函数的雷达搜索模型,可以在多个高超声速飞行器来袭场景下,迅速调整雷达的搜索资源分配方案,优先捕获威胁大的目标;
17.(3)提出了一种基于差分进化算法和粒子群算法的混合优化算法,设计了粒子群算法的自适应惯性权重和学习因子提高搜索效率,并利用差分进化算法的变异、交叉和选择操作对粒子群进行扰动,增强粒子群的多样性,从而提高算法的全局寻优能力。
附图说明
18.图1为高超声速飞行器高度的威胁度变化曲线图;
19.图2为高超声速飞行器速度的威胁度变化曲线图;
20.图3为高超声速飞行器距离的威胁度变化曲线图;
21.图4为高超声速飞行器单次检测概率与信噪比关系图;
22.图5为高超声速飞行器脉冲积累数量与信噪比关系图;
23.图6为高超声速飞行器累积检测概率与重照次数关系图;
24.图7为粒子群算法惯性权重变化曲线图;
25.图8为粒子群算法学习因子变化曲线图;
26.图9为阈值s的变化曲线图;
27.图10为仿真实验中总的累积探测概率随搜索任务资源占用率的关系图;
28.图11为仿真实验中平均发现时间随搜索任务资源占用率的关系图;
29.图12为仿真实验中method 1、method 2和本发明所提优化方法在不同搜索任务资源占用率情况下对三个高超声速目标的探测概率图;
30.图13为仿真实验中method 1、method 2和本发明所提优化方法在不同搜索任务资源占用率情况下对三个高超声速目标的时间资源分配图;
31.图14为仿真实验中method 1、method 2和本发明所提优化方法在不同搜索任务资源占用率情况下的收敛性对比图;
32.图15为本发明方法流程图。
具体实施方式
33.下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.一种基于引导信息的高超声速飞行器搜索方法,具体包括以下步骤:
35.步骤一、根据引导信息确定雷达的搜索空域
36.引导信息为雷达尽快搜索捕获目标提供了重要依据;它主要包括估计的目标位置信息、速度信息以及误差信息;
37.假设引导信息给出的高超声速飞行器位置和速度为雷达需要根
据目标的引导信息转换为方位角和俯仰角信息将引导信息的误差表示为目标的真实方位角和俯仰角信息为则可以得到
[0038][0039]
假设目标在雷达搜索空域ω内出现的概率密度为则该目标在此空域出现的概率可表示为
[0040][0041]
搜索空域的大小主要受引导信息误差的影响。引导信息误差越小,引导信息的精确度越高,搜索空域的范围就越小。相反,引导信息误差越大,引导信息精确度越低,搜索空域的范围就越大。虽然扩大搜索空域的范围,更有利于覆盖目标,进而提高捕获目标的概率。但过大的搜索空域同样会造成雷达资源的浪费,降低雷达性能。所以,我们通常根据3倍均方根误差(3δ) 原则确定搜索空域的范围。同时,根据确定的搜索空域,合理设置雷达的搜索参数,以保证雷达在搜索空域内对目标的截获概率高于搜索门限值,即
[0042]
pd≥p
conf
ꢀꢀꢀꢀꢀꢀ
(3)
[0043]
其中,p
conf
为搜索门限值。
[0044]
步骤二、高超声速飞行器的优先级判定
[0045]
由于目标距离、速度等原因,不同高超声速飞行器的优先级是有所区别的。雷达在执行搜索任务时,会尽量提高优先级高的目标的捕获概率。所以,如何判断目标优先级是雷达搜索过程中面临的首要问题。
[0046]
目标优先级的判定通常根据引导信息来确定。我们提出了三个指标来对高超声速飞行器的优先级进行判断,分别为:目标高度、目标速度、目标距离。
[0047]
(1)目标高度
[0048]
目标高度反映了目标的运动状态。对于高超声速飞行器来说,飞行高度越低,说明剩余飞行时间越短,距离它的下压打击阶段越近,防御方的应对时间越少,防御拦截越困难。因此,目标高度越低,威胁度越大。高超声速飞行器通常飞行于20km~100km的空域范围,将目标高度的威胁度建模为[0, 1]区间的函数
[0049][0050]
其中,h
mid
=(h
max
h
min
)/2,h
max
=100km表示飞行高度的上界,h
min
=20km 表示飞行高度的下界。如图1所示。
[0051]
(2)目标速度
[0052]
目标速度反映了目标的攻击能力。对于高超声速飞行器来说,速度越快,机动性越强,攻击能力越强,攻击范围也越大。而且,高速度也给探测系统发现和跟踪目标带来了困难。因此,目标速度越快,威胁度越大。高超声速飞行器的机动速度通常在5~20ma,将目标速度的威胁度建模为
[0053][0054]
其中,v=20ma表示飞行速度的上界,γ表示速度的威胁系数,γ的取值范围一般为[0.025,0.035]。速度的威胁度变化曲线如图2所示。本发明采用γ= 0.03,v=15ma。
[0055]
(3)目标距离
[0056]
目标距离是目标威胁度的一个重要指标。目标距离越近,攻击性越强,危险系数越高,对应的威胁度也越大。假设雷达最远探测距离为1500km,可以将目标距离的威胁度建模为
[0057][0058]
式中,表示最小威胁度,κ表示距离的威胁度系数。如图3所示,通过和κ可以调节距离的威胁度曲线。通常设置为一个位于[0.1,0.3]区间内的常数。κ通常设为一个位于[0.001,0.003]区间内的常数。r表示目标与雷达的距离。本发明中,为0.2,κ为0.002.
[0059]
通过对目标高度、目标速度和目标距离的威胁度判断,我们可以得到目标的综合威胁度为
[0060]
w=χhwh χvwv χrwrꢀꢀꢀꢀꢀꢀꢀ
(7)
[0061]
式中,χh、χv和χr分别是目标高度、目标速度和目标距离对应的威胁度权重。
[0062]
将所有的目标威胁度进行归一化,既可以得到每个目标对应的威胁度值 wi。
[0063]
步骤三、建立雷达搜索模型
[0064]
3.1优化目标函数
[0065]
雷达在对目标进行搜索时,通常希望能够在最短时间内以最大概率捕获目标。
[0066]
假设在多目标从不同方向来袭的场景下,雷达需要搜索的空域数量为n 个。假设第i个子空域的搜索帧周期为目标在空域i中出现的时间服从均匀分布,则目标在第一个搜索帧周期被发现的平均时间为
[0067][0068][0069]
p
ki
=pi·
(1-pi)kꢀꢀꢀꢀꢀ
(10)
[0070]
式中,pi为雷达单次驻留时间内对目标的检测概率。根据高超声速飞行器的起伏特性,将其建模为swerlingiii型目标,其检测概率的公式为
[0071]
[0072]
式中,v
t
为检测门限,γi(
·
)为不完全伽马函数,n
p
为单次驻留时间内积累的脉冲数量,snr为信噪比。
[0073]
由此可以得出,目标在空域i中的平均发现时间为
[0074][0075]
雷达在第i个空域对目标的累积发现概率为
[0076][0077]
式中,n为雷达重访次数。
[0078]
通常,我们希望目标的平均发现时间尽量短,而累积发现概率尽可能大。
[0079]
因此,我们将优化准则设计为
[0080][0081]
式中,n为待搜索的空域总数量。
[0082]
3.2约束条件
[0083]
由于时间资源和能量资源的限制,雷达在对目标进行搜索的过程中,还应该满足一些约束条件,主要包括以下约束:
[0084]
(1)探测概率约束
[0085]
雷达搜索过程中,需要满足单目标累积检测概率大于0.95的要求才能将目标捕获,即
[0086][0087]
可以看出,累积检测概率与单次检测概率和照射次数相关,单次检测概率越大、照射次数越多,累积检测概率也越大。而单次检测概率又与信噪比有关。当虚警概率恒定时,单次检测概率与信噪比的关系如图4所示。信噪比与脉冲积累数量有关,信噪比与脉冲积累数量的关系如图5所示。当单次检测概率恒定时,累积检测概率与重照次数的关系如图6所示。
[0088]
同时照射次数n应该满足
[0089]
0《n《tz/tiꢀꢀꢀꢀꢀ
(16)
[0090]
其中,tz表示总的时间资源。
[0091]
(2)驻留时间约束
[0092]
雷达作用距离方程为
[0093][0094]
其中,p
t
和g
t
分别为雷达发射机功率和发射天线功率,ar为接收机截面积,σ为目标散射截面积,l表示总损耗,k=1.38
×
10-23
j/k为玻尔兹曼常数,te=288k为绝对温度,b为雷达带宽。
[0095]
雷达驻留时间可以表示为
[0096][0097]
其中,τ表示脉冲宽度。
[0098]
将上式带入式(17),并整理可得
[0099][0100]
雷达在探测过程中,为避免出现距离模糊,脉冲重复周期需要满足
[0101][0102]
其中,c表示光速,其值为3
×
108m/s.
[0103]
(3)时间资源约束
[0104]
雷达执行搜索任务的总时间为
[0105][0106]
其中,mi为雷达在第i个空域中的波位数量。
[0107]
相控阵雷达利用时间分割技术,可以同时执行搜索和跟踪任务。假设搜索资源占总资源的比例为λ,则雷达进行搜索的总时间需要满足
[0108][0109]
3.3搜索模型
[0110]
综合考虑目标的优先级和约束条件限制,我们将雷达搜索参数优化公式设计为
[0111][0112][0113]
步骤四、基于差分进化和粒子群优化的混合优化算法对搜索模型进行求解
[0114]
可以看出,上述优化问题属于多目标多约束优化。为提高求解效率,我们提出了一种将差分进化算法和粒子群算法相结合的混合优化算法。
[0115]
4.1基本粒子群算法
[0116]
粒子群算法(particle swarm optimization,pso)是一种群体智能的简化模型,将最优化问题的求解过程比作鸟类觅食的过程,将求解空间比作鸟类的飞行空间,通过粒子在解空间中的运动搜索最优解。pso参数简单、易于实现,在函数优化、模式分类、控制工程等领域得到了广泛应用。
[0117]
pso算法将每一个粒子看做一个潜在的最优解,根据每个粒子的适度值判断最优位置,通过自身历史最优位置和群体历史最优位置来更新每个粒子当前的运动速度和位置。在t 1时刻(代),它的更新公式为
[0118][0119]
x
ij
(t 1)=x
ij
(t) v
ij
(t 1)
ꢀꢀꢀꢀ
(26)
[0120]
式中,x
ij
表示粒子的位置,p
ij
表示粒子的历史最优位置,p
gi
表示群体的历史最优位置,v
ij
表示粒子的速度,c1和c2为学习因子,r1和r2表示分布在[0,1]区间的随机数,i表示第i个粒子,j表示第j个维度,w表示惯性权重。
[0121]
4.2自适应参数设计
[0122]
公式(25)右侧第i项主要表示粒子自身的惯性运动,由惯性权重w控制。在搜索过程中,w是可以动态变化的。在搜索前期,w取较大值,有利于增强粒子自身惯性权重,从而增强全局搜索能力;在搜索后期,w取较小值,有利于算法的快速收敛,找到局部甚至全局最优值。这里,采用动态变权策略,将w设置为
[0123][0124]
式中,w
max
和w
min
分别表示最大惯性权重和最小惯性权重,g
max
表示最大迭代次数。
[0125]
公式(25)右侧第ⅱ项和第iii项分别表示粒子的自我认知部分和社会认知部分。c1主要用来控制粒子自我历史最佳位置对粒子移动的影响,c1的取值越大,粒子越趋向于靠近自我历史最佳位置。c2主要用来控制粒子群体历史最佳位置对粒子移动的影响,c2的取值越大,粒子越趋向于靠近群体的历史最佳位置。为了让粒子在搜索最优解前期尽量扩大搜索范围,在搜索后期尽量快速收敛到最优位置,将学习因子c1和c2设计为关于迭代次数的三角函数
[0126][0127][0128]
式中,ca、cb、cc和cd均为常数。
[0129]
图7和图8展现了惯性权重和学习因子随着迭代次数的变化曲线。将设计后的三个变量带入式(25)替换原来的更新公式。
[0130]
4.3混合优化算法
[0131]
由于粒子群算法只考虑了粒子个体最优和种群最优的相关性,缺乏种群多样性,容易过早收敛,陷入局部最优。为了克服这一缺陷,我们将粒子群算法和差分进化相结合,提出了一种基于粒子群算法和差分进化的混合优化算法。
[0132]
差分进化(differential evolution,de)是一种启发式搜索算法,通过种群的变异、交叉、选择操作寻找最优解,全局搜索能力强。差分进化的变异公式如下
[0133][0134]
式中,r1、r2和r3是随机序号,且互不相同。f是缩放比例因子,将其设计为自适应调节的参数
[0135]
f=f0 2
λ
ꢀꢀꢀꢀꢀꢀꢀ
(31)
[0136][0137]
式中,f0为变异算子。
[0138]
利用差分进化对粒子群算法的进化方向进行扰动,公式如下
[0139][0140]
式中,当[0,1]区间的随机数小于等于阈值s时,粒子执行差分进化中的变异操作,随后进行交叉、选择。当[0,1]区间的随机数大于阈值s时,粒子按照公式(25)执行粒子群算法中的进化方式。将阈值s设计为一个自适应的函数
[0141][0142]
画出阈值s随进化代数的变化曲线如图9所示。可以看出,在进化初期, s的取值偏大,让粒子有更大概率执行差分进化,增加种群多样性。在进化后期,s的取值偏小,让粒子尽快收敛,寻找到最优值。
[0143]
仿真实验
[0144]
为揭示其内部机理并验证本发明所提优化算法的有效性,给出了数值运算。假设雷达的参数设计如表1所示。来袭目标均为高超声速目标,散射截面积为0.01m2,累积检测概率为0.95,虚警率为10-6
。选取如下两种方法作为对比算法:
[0145]
第一个对比算法是粒子群退火算法,标记为method 1。
[0146]
第二个对比算法是改进差分进化算法,标记为method 2。
[0147]
表1雷达参数
[0148][0149]
假设有三个高超声速飞行器从不同方向来袭,雷达根据预警信息确定搜索范围,并估计高超声速飞行器的距离、速度和高度信息,如表2所示。根据公式(4)~(7)可以计算出三个高超声速飞行器对应的优先级分别为0.2670、0.3147和0.4183。通过method 1、method 2和本发明方法对三个飞行器进行搜索资源分配,得到总的累积探测概率随搜索任务资源占用率的关系如图10 所示,平均发现时间随搜索任务资源占用率的关系如图11所示。随着搜索任务资源占用率的比例逐渐增大,总的累积探测概率逐渐增大,平均发现时间逐渐缩短,当搜索任务资源占用率大于0.7时,总的累积探测概率增大的幅度逐渐减缓,平均发现时间缩短的幅度也逐渐减缓。但本发明所提的优化算法始终优于method 1和method 2,尤其是当搜索任务资源占用率较低时,本发明所提方法的优势越明显。
[0150]
表2各目标状态信息及对应的搜索参数
[0151][0152]
图12(1)、图12(2)和图12(3)分别是method 1、method 2和本发明所提优化方法在不同搜索任务资源占用率情况下对三个目标的探测概率。可以发现,在同样的搜索任务资源占用率下,目标三的截获概率大于目标二和目标一,这是因为优先级越高的目标对应的权重越大,得到的搜索资源也相对更多。搜索任务资源占用率越低时,这种现象越明显。同
时还可以发现,当搜索资源严重不足以应对三个目标的搜索任务时,method1和本发明所提算法都根据目标优先级选择了放弃对目标一的搜索以尽可能提高目标二和目标三的探测概率。
[0153]
为了更详细分析本发明算法在搜索资源不足情况下的性能,画出在搜索任务资源占用率为0.1的情况下,不同算法对应的时间资源分配,如图13所示。可以看出,本发明所提算法将63%的时间资源分配给了目标三,将30%的时间资源分配给了目标二,将7%的时间资源分配给了目标一。这样的分配方式能够优先保障重点目标的搜索。
[0154]
分别对比搜索任务占用率为0.1、0.5和1时各算法的收敛情况。不同算法的收敛性对比情况如图14所示,发现当搜索任务占用率越低时,算法收敛的速度也越慢。同时还可以看出,本发明所提算法收敛速度总是优于其他两种算法。
[0155]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。