1.本发明应用于耳道扫描,尤其涉及一种多维耳道扫描装置。
背景技术:
2.非定制化的耳机/助听器往往不能很好地适应不同人耳道轮廓,容易对耳道和耳甲腔形成局部压迫或者存在间隙,导致佩戴不适、易脱落、隔音效果差等问题。为提升耳机/助听器入耳部分与耳道轮廓的贴合度,显然最好是能够根据耳道轮廓进行定制,而传统的定制方式需经过耳印模、涂蜡、取阴模、注入光敏树脂、固化成形等一系列工序,不仅制作时间长、成本高,而且取模误差大,未够精准、方便。
技术实现要素:
3.本发明提出一种用于耳机/助听器产品定制的多维耳道扫描装置,实现多维耳道数据的扫描采集,其具体通过以下技术手段实现:
4.本发明的多维耳道扫描装置包括扫描装置、扫描控制器、机械臂以及机械臂控制器,所述机械臂为六自由度机械臂,所述扫描装置安装于机械臂的末端并由机械臂带动围绕目标扫描位置作多维运动,所述扫描控制器和机械臂控制器分别与上位机连接以收发数据。
5.于本发明的一个或多个实施例当中,所述机械臂控制器连接有用于点动机械臂以设定运动轨迹的机械臂示教器。所述机械臂控制器与上位机之间通过rs232总线连接,且二者基于pns远程控制方式进行通讯。所述机械臂安装于可升降调节的立柱三脚架之上,所述立柱三脚架具有两档以上的可调高度。
6.于本发明的一个或多个实施例当中,所述扫描装置为线激光扫描仪,其通过有线或无线方式与扫描控制器连接。
7.于本发明的一个或多个实施例当中,所述扫描控制器和机械臂控制器分别设置有通讯模块,用以实现与上位机的有线或无线通讯连接。
8.于本发明的一个或多个实施例当中,所述上位机连接有提供操作界面以及显示扫描结果的显示器。
9.本发明的有益效果是:用于实现上位机下达的扫描指令,通过六自由度机械臂带动扫描装置围绕目标扫描位置作多维运动,并获取实时扫描数据上传至传位机,以便上位机快速获得耳朵三维数据信息,为后续耳朵三维模型的构建奠定基础。
附图说明
10.图1为本发明的系统原理框图。
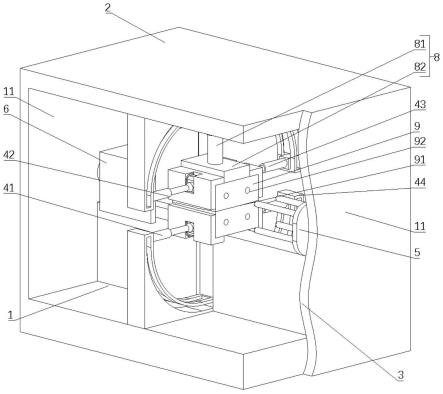
11.图2为本发明的结构示意图。
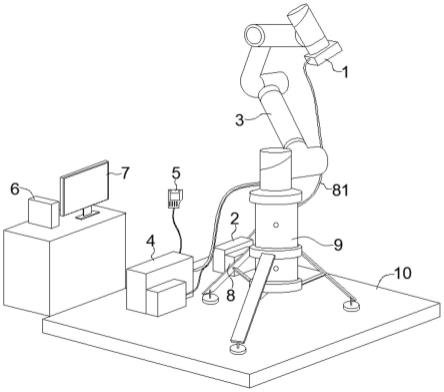
12.图3为本发明的使用状态示意图。
具体实施方式
13.如下对本申请方案作进一步描述:
14.参见附图1至2,多维耳道扫描装置包括扫描装置1、扫描控制器2、机械臂3、机械臂控制器4以及机械臂示教器5,所述机械臂3为六自由度机械臂,所述扫描装置1为线激光扫描仪,其安装于机械臂3的末端并由机械臂3带动围绕目标扫描位置a作多维运动,并令扫描装置1的传感面始终朝向目标扫描位置a,所述扫描控制器2和机械臂控制器4分别与上位机6连接以收发数据,所述上位机6连接有提供操作界面以及显示扫描结果的显示器7。启动扫描时人坐在装置旁的椅子上,设定人头部为目标扫描位置,参见附图3;所述扫描装置1获得的每一帧数据是一个二维的线轮廓数据,上位机6结合机械臂3的运动规律将二维线轮廓数据增加一维运动偏移距离,从而将线分布到面上,实现对耳道的三维数据信息采集。
15.本实施例中采用的线激光扫描仪是二维线激光扫描仪,其配备有扫描控制器2和220v交流转24v直流的电源模块8,电源模块8的电源线81与二维线激光扫描仪连接后自由下垂,以免阻碍机械臂3动作。扫描控制器2通过usb端口与上位机6连接,或者配备无线通讯模块与上位机6连接,其在对数据进行模数转换等预处理后再上传给上位机6。
16.本实施例中采用的机械臂3是六自由度机械臂,其配备有机械臂控制器4和机械臂示教器5,能够高精度规划机械臂3的运动轨迹。所述机械臂控制器4与上位机6之间通过rs232总线连接,且二者基于pns远程控制方式进行通讯;pns远程控制方式是预先通过机械臂示教器5编写好轨迹程序,然后上位机6发送相应格式的脉冲信号就可启动和执行相应的轨迹程序。
17.为适配目标扫描位置的高度,所述机械臂3安装于可升降调节的立柱三脚架9之上,其最大运动范围是以立柱三脚架9为中心的半径717mm圆形区域。所述立柱三脚架9具有两档以上的可调高度,例如可采用艾顿重型立柱三脚架。
18.考虑到整个系统的装配和机械臂3的动作,所述扫描控制器2、机械臂控制器4、电源模块8等一般安置于机械臂3下方的基座10上,扫描控制器2与扫描装置1之间可采用有线或无线方式连接,所述扫描控制器2和机械臂控制器4分别设置有通讯模块,用以实现与上位机6的有线或无线通讯连接,较为理想的是采用无线方式连接。
19.本发明用于实现上位机下达的扫描指令,通过六自由度机械臂带动扫描装置围绕目标扫描位置作多维运动,并获取实时扫描数据上传至传位机,以便上位机快速获得耳朵三维数据信息,为后续耳朵三维模型的构建奠定基础。
20.上述优选实施方式应视为本申请方案实施方式的举例说明,凡与本申请方案雷同、近似或以此为基础作出的技术推演、替换、改进等,均应视为本专利的保护范围。
技术特征:
1.一种多维耳道扫描装置,其特征在于,包括扫描装置、扫描控制器、机械臂以及机械臂控制器,所述机械臂为六自由度机械臂,所述扫描装置安装于机械臂的末端并由机械臂带动围绕目标扫描位置作多维运动,所述扫描控制器和机械臂控制器分别与上位机连接以收发数据,所述上位机连接有提供操作界面以及显示扫描结果的显示器。2.根据权利要求1所述的多维耳道扫描装置,其特征在于,所述机械臂控制器连接有用于点动机械臂以设定运动轨迹的机械臂示教器。3.根据权利要求1所述的多维耳道扫描装置,其特征在于,所述机械臂控制器与上位机之间通过rs232总线连接,且二者基于pns远程控制方式进行通讯。4.根据权利要求1所述的多维耳道扫描装置,其特征在于,所述机械臂安装于可升降调节的立柱三脚架之上,所述立柱三脚架具有两档以上的可调高度。5.根据权利要求1所述的多维耳道扫描装置,其特征在于,所述扫描装置为线激光扫描仪,其通过有线或无线方式与扫描控制器连接。6.根据权利要求1-5任一项所述的多维耳道扫描装置,其特征在于,所述扫描控制器和机械臂控制器分别设置有通讯模块,用以实现与上位机的有线或无线通讯连接。
技术总结
本发明提出一种多维耳道扫描装置,实现多维耳道数据的扫描采集,其特征在于:包括扫描装置、扫描控制器、机械臂以及机械臂控制器,所述机械臂为六自由度机械臂,所述扫描装置安装于机械臂的末端并由机械臂带动围绕目标扫描位置作多维运动,所述扫描控制器和机械臂控制器分别与上位机连接以收发数据。本发明用于实现上位机下达的扫描指令,通过六自由度机械臂带动扫描装置围绕目标扫描位置作多维运动,并获取实时扫描数据上传至传位机,以便上位机快速获得耳朵三维数据信息,为后续耳朵三维模型的构建奠定基础。的构建奠定基础。的构建奠定基础。
技术研发人员:徐立 梁毅途
受保护的技术使用者:天键医疗科技(广东)有限公司
技术研发日:2022.02.25
技术公布日:2022/6/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。