技术特征:
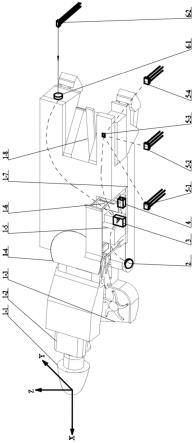
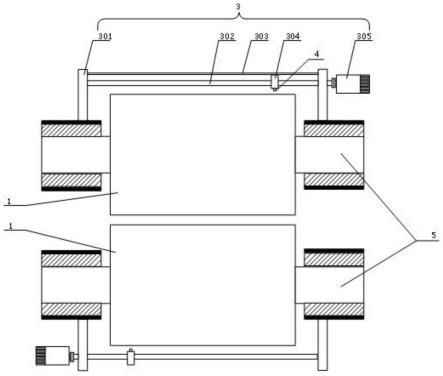
1.一种基于捷联惯导的掘进机组合定位系统,其特征在于:包括uwb定位系统、捷联惯导系统、编码器(2)、激光定位系统以及信号处理箱(3),所述激光定位系统用于检测掘进机是否处于正确的行进方向,所述uwb定位系统、捷联惯导系统、编码器(2)用于检测掘进机机身的位置信号和运动信号,所述信号处理箱(3)用于处理uwb定位系统、捷联惯导系统、编码器(2)、激光定位系统传回的掘进机机身位置信息信号,并根据给定的掘进机组合定位位置算法得出掘进机实时位置信息。2.如权利要求1所述的一种基于捷联惯导的掘进机组合定位系统,其特征在于:所述的uwb定位系统包括布置在巷道内的矿用本安型的定位基站一(5-1)、定位基站二(5-2)、定位基站三(5-4)、定位终端(5-3),所述定位基站一(5-1)定位基站二(5-2)、定位基站三(5-4)分布于巷道的一侧,所述定位终端(5-3)置于掘进机尾座上。3.如权利要求2所述的一种基于捷联惯导的掘进机组合定位系统,其特征在于:相邻的定位基站一(5-1)、定位基站二(5-2)以及定位基站三(5-4)之间间隔两米进行布置。4.如权利要求1所述的一种基于捷联惯导的掘进机组合定位系统,其特征在于:所述捷联惯导系统包括集成的三轴光纤陀螺惯性导航单元(4),所述三轴光纤陀螺惯性导航单元(4)置于掘进机座位(1-6)底部。5.如权利要求1所述的一种基于捷联惯导的掘进机组合定位系统,其特征在于:所述激光定位系统包括激光器(6-2)、激光传感器(6-1),所述激光传感器(6-1)置于掘进机机身尾部,所述激光器(6-2)置于掘进机机身后面与激光传感器(6-1)对应。6.如权利要求1所述的一种基于捷联惯导的掘进机组合定位系统,其特征在于:所述信号处理箱(3)置于掘进机控制台(1-5)底部,所述的信号处理箱(3)内置微处理器用以处理uwb定位系统(5)、捷联惯导系统、编码器(2)以及激光定位系统传回的掘进机机身位置信息。7.一种如权利要求1-6任一项所述的基于捷联惯导的掘进机组合定位系统的定位方法,其特征在于:包括以下步骤:(a)启动掘进机;(b)启动激光定位系统;(c)判断掘进机是否处于正确的行进方向,若为是,则执行步骤(e),若为否,则执行步骤(d);(d)进行掘进机主动位姿调整,调整后继续执行步骤(c);(e)启动掘进机组合定位系统;(f)捷联惯导系统检测机身位置信号w
jc
,uwb系统检测机身位置信号w
uc
,编码器(2)检测机身位置信号w
bc
;(g)位置信息w
jc
、w
uc
、w
bc
以50%、50%、50%的权重比输出,得出掘进机初始位置信息;(h)掘进机工作;(i)捷联惯导系统检测机身运动信号w
jd
,uwb系统检测机身运动信号w
ud
,编码器(2)检测机身运动信号w
bd
;(j)判断由uwb系统(5)测得的机身运动信号w
ud
是否小于等于编码器(2)测得的机身运动信号w
bd
,若为是,则位置信息w
jd
、w
ud
、w
bd
以50%、50%、50%的权重比输出得到掘进机融合位置信息,若为否,则位置信息w
jd
、w
ud
、w
bd
以75%、25%、25%的权重比输出得到掘进机融合
位置信息;(k)得到的掘进机的融合位置信息再进过卡尔曼滤波得到最终的掘进机实时位置信息。
技术总结
本发明公开了一种基于捷联惯导的掘进机组合定位系统及其定位方法,该系统包括UWB定位系统、捷联惯导系统、编码器、激光定位系统、信号处理箱,本发明将掘进机在掘进过程中由于路况或者工作面煤岩硬度不均等造成的行进方向突变的问题单独由激光定位方法进行实时测量,不再加入到定位算法中,缓解了算法压力;本发明将捷联惯导定位、UWB定位以及编码器等定位方法进行融合,形成了一种组合定位方法,有效弥补了这些定位方法单独使用时的一些自身缺陷,提高了掘进机的定位精度。提高了掘进机的定位精度。提高了掘进机的定位精度。
技术研发人员:沈刚 朱真才 李翔 汤裕 孙德奇 许少毅 柏德恩 王威 袁冠 陈朋朋
受保护的技术使用者:中国矿业大学
技术研发日:2022.02.25
技术公布日:2022/6/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。