1.本发明涉及无人机探测技术领域,具体涉及一种无人机电子干扰系统。
背景技术:
2.随着无人机的迅猛发展,其黑飞、乱飞现象造成的严重安全事故已井喷式爆发,对政府要地、机场、重要基础设施构成了巨大威胁。如何有效防控无人机肇事,已成为涉及国家、社会及军事安全的重要课题。
3.目前,反无人机主要采取的是人工观察空中飞行无人机,待发现威胁目标后,利用便携式干扰设备实施干扰。由于人工观察容易发生误判,且人工观察响应较慢,不能在第一时间采取反制措施。此外,当预警区域较大时,需要大量人力,人力成本较高。
技术实现要素:
4.本发明要解决的技术问题是解决上述现有技术的不足,提供一种自动监控,自动实施干扰的反无人机系统。
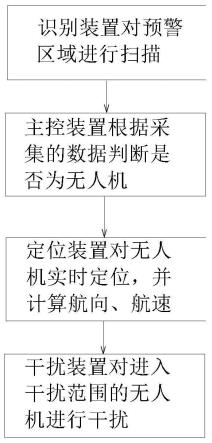
5.为了解决上述现有技术的不足,本发明采用的技术方案为:一种无人机电子干扰系统,包括无人机识别装置、无人机定位装置、干扰装置以及主控装置;所述无人机识别装置对预警区域进行扫描,判断是否有无人机进入该区域;
6.所述无人机定位装置对入侵的无人机进行定位,并确定其航向以及航速;所述主控装置根据无人机当前位置、航向以及航速预判其进入干扰装置有效干扰范围的时间;所述干扰装置发送干扰信号至无人机,使其返航或者降落。
7.进一步的,所述无人机干扰系统包括锂电池组、电源管理单元、中央控制单元、2.4ghz调频干扰源、5.8ghz调频干扰源以及1.6ghz扩频干扰源,三个干扰源通过射频功率放大器放大,再分别连接指向性天线。
8.进一步的,所述干扰装置包括gps信号发生器以及信号放大装置,gps信号发生器用于产生虚假的地理位置坐标,信号放大装置对虚假信号放大,使其强度大于地表的gps信号强度,放大后的信号经过天线发送至无人机。
9.进一步的,无人机识别装置对预警区域内无人机通信信号进行扫描;当预警区域内有无人机通信信号,且通信信号逐渐增强,且增强持续时间大于t,主控装置每隔一个时间t记录一次无人机通信信号的rssi值,按照时间顺序从前向后排序,形成一组数列,单位为dbm,并根据时序数列对未来t1内的rssi值进行预测,当预测值中rssi值中有大于设定的阀值m的,确定有无人机即将进入该预警区域。
10.进一步的,所述无人机定位装置包括若干组双目相机,预警区域分为若干子区域中,每个子区域至少有一组双目相机的视域覆盖,当无人机识别装置发现预警区域存在无人机入侵时,主控装置发送控制信号至双目相机使其开启从而对相关区域扫描,当双目相机初次发现无人机后对其进行跟拍,以一定频率拍摄图片,获取的图像中的像素位置信息得到像素坐标,并将像素坐标转换成世界坐标,从而得出无人机各个时间点的位置,并由此
计算器航向以及速度。
11.将预警区域划分成若干个子区域,所述无人机进行定位装置包括定向接收天线,其设置在三个基点位置,建立空间坐标系,通过三个定向接收天线接收到的信号的强度以及接收到的信号最强的方位角,将得到三个关于入侵无人机的位置坐标的信息联立,再根据三个定向接收天线的基点位置,即可得到入侵无人机的空间坐标。
12.从上述技术方案可以看出本发明具有以下效果:本发明自动识别入侵的无人机,并确定其航向、速度,预判其将来的位置,进行精准干扰,无需人工观测,且处理数据量小,能耗低。可以满足大范围区域的预警。
附图说明
13.图1为本发明的工作流程图。
具体实施方式
14.以下结合附图对本发明的具体实施方式做具体说明。
15.本发明的一种无人机电子干扰系统包括无人机识别装置、无人机定位装置、干扰装置以及主控装置。
16.所述无人机识别装置对预警区域进行扫描,判断是否有无人机进入该区域。具体的判断方法如下:无人机识别装置对预警区域内无人机通信信号进行扫描;当预警区域内有无人机通信信号,且通信信号逐渐增强,且增强持续时间大于t,本实施例中,例如t值可以为20s,此时可以判断无人机在不断靠近预警区域。
17.此后,主控装置每隔一个时间t(例如10s)记录一次无人机通信信号的rssi值,按照时间顺序从前向后排序,形成一组数列,单位为dbm,并根据时序数列对未来t1内的rssi值进行预测,当预测值中rssi值中有大于设定的阀值m的,确定有无人机即将进入该预警区域。rssi值的预测模型采用二次指数平滑法,具体的:
18.si=αxi (1-α)(s
i-1
t
i-1
)
19.ti=β(s
i-s
i-1
) (1-β)t
i-1
20.x
i h
=si hti21.其中si是之前i个数据的平滑值,取值为[0,1],α为平滑系数。
[0022]
无人机定位装置对入侵的无人机进行定位,并确定其航向以及航速;本实施例中采用的第一种方法是双目相机扫描定位,具体的:当识别装置发现无人机入侵后,主控系统发送启动命令给双目相机,双目相机开始进行扫描。
[0023]
双目相机的工作原理如下:当无人机识别装置发现预警区域存在无人机入侵时,主控装置发送控制信号至双目相机使其开启从而对相关区域扫描,当双目相机初次发现无人机后对其进行跟拍,以一定频率拍摄图片,获取的图像中的像素位置信息得到像素坐标,并将像素坐标转换成世界坐标,从而得出无人机各个时间点的位置,并由此计算器航向以及速度。
[0024]
第一种方法如下:将预警区域划分成若干个子区域,所述无人机进行定位装置包括定向接收天线,其设置在三个基点位置,建立空间坐标系,通过三个定向接收天线接收到的信号的强度以及接收到的信号最强的方位角,将得到三个关于入侵无人机的位置坐标的
信息联立,再根据三个定向接收天线的基点位置,即可得到入侵无人机的空间坐标。
[0025]
所述主控装置根据无人机当前位置、航向以及航速预判其进入干扰装置有效干扰范围的时间。干扰装置发送干扰信号至无人机,使其返航或者降落。干扰方式可以采取如下方式
[0026]
第一种:无线电劫持。该装置包括锂电池组、电源管理单元、中央控制单元、2.4ghz调频干扰源、5.8ghz调频干扰源以及1.6ghz扩频干扰源,三个干扰源通过射频功率放大器放大,再分别连接指向性天线。通过模拟遥控器向无人机发送控制信号,并覆盖真正遥控器的信号,从而获得无人机的控制权。
[0027]
第二种:gps欺骗。gps欺骗的主要原理就是向无人机的控制系统发送虚假的地理位置坐标,从而控制导航系统,诱导无人机飞向错误的地点。gps信号可以由发生器来产生,也可以是事先录制然后重放。由于无人机接收gps信号总是以信号最强的信号源为准,因此在地面人造的gps信号只要强度足够大,就可以覆盖真正的从太空中传来的gps信号,从而欺骗无人机的gps接收模块。具体的:该装置包括gps信号发生器以及信号放大装置,gps信号发生器用于产生虚假的地理位置坐标,信号放大装置对虚假信号放大,使其强度大于地表的gps信号强度,放大后的信号经过天线发送至无人机。
[0028]
此外,还可以采用软件攻击等手段,通过无人机控制系统中开放的端口或密码猜解等手段,进入控制系统实现对无人机的控制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。