技术特征:
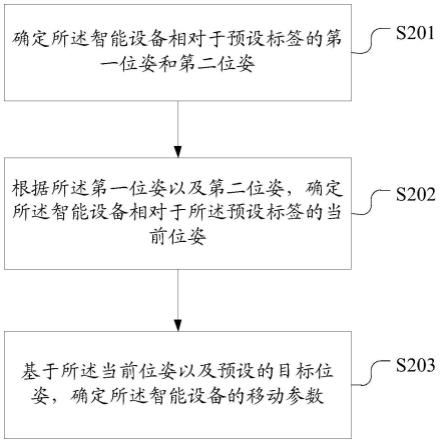
1.一种移动参数确定方法,其特征在于,应用于智能设备中,所述方法包括:确定所述智能设备相对于预设标签的第一位姿和第二位姿,其中所述第一位姿是根据所述智能设备的图像采集装置采集的所述预设标签的信息确定的,所述第二位姿为根据所述智能设备的里程计采集的运行信息确定的;根据所述第一位姿以及第二位姿,确定所述智能设备相对于所述预设标签的当前位姿;基于所述当前位姿以及预设的目标位姿,确定所述智能设备的移动参数,所述目标位姿为表征所述智能设备到达目标位置后停止移动的位姿。2.根据权利要求1所述的方法,其特征在于,根据所述第一位姿以及第二位姿,确定所述智能设备相对于所述预设标签的当前位姿,包括:若第一角速度不为零,则根据所述第一角速度相对于第二角速度的角速度偏差,确定所述第一位姿对应的权重系数以及所述第二位姿对应的权重系数;根据所述第一位姿和对应的权重系数,以及所述第二位姿和对应的权重系数,确定所述当前位姿;其中,所述第一角速度为根据所述运行信息确定的角速度,所述第二角速度为所述智能设备的惯性测量单元imu采集的角速度;所述第一位姿对应的权重系数与所述第二位姿对应的权重系数之和为定值,所述角速度偏差越大,所述第一位姿对应的权重系数越大。3.根据权利要求1所述的方法,其特征在于,根据所述第一位姿以及第二位姿,确定所述智能设备相对于所述预设标签的当前位姿,包括:若第一角速度为零,则将预设权重系数作为所述第二位姿对应的权重系数;根据所述第一位姿和对应的权重系数,以及所述第二位姿和对应的权重系数,确定所述当前位姿;其中,所述第一角速度为根据所述运行信息确定的角速度;所述第一位姿对应的权重系数与所述第二位姿对应的权重系数之和为定值,且所述预设权重系数小于所述第一位姿对应的权重系数。4.根据权利要求2所述的方法,其特征在于,通过以下方式确定所述第一位姿对应的权重系数以及所述第二位姿对应的权重系数:根据预设的偏差、第一权重系数以及第二权重系数的第一对应关系,将所述角速度偏差对应的第一权重系数作为所述第一位姿对应的权重系数,以及将所述角速度偏差对应的第二权重系数作为所述第二位姿对应的权重系数;或者根据预设的偏差以及第一权重系数的第二对应关系,将所述角速度偏差对应的第一权重系数作为所述第一位姿对应的权重系数,将所述定值以及所述第一位姿对应的权重系数之差作为所述第二位姿对应的权重系数;或者根据预设的偏差以及第二权重系数的第三对应关系,将所述角速度偏差对应的第二权重系数作为所述第二位姿对应的权重系数,将所述定值以及所述第二位姿对应的权重系数之差作为所述第一位姿对应的权重系数。5.根据权利要求2或3所述的方法,其特征在于,根据所述第一位姿和对应的权重系数,以及所述第二位姿和对应的权重系数,确定所述当前位姿,包括:根据所述第一位姿对应的第一坐标,以及所述第二位姿对应的第二坐标,确定当前坐
标;并将所述第一位姿对应的第一航向角以及所述第二位姿对应的第二航向角之和,作为当前航向角;将所述当前坐标和所述当前航向角作为所述当前位姿;其中,所述第一坐标为根据所述第一位姿包含的坐标和对应的权重系数确定的,所述第二坐标为根据所述第二位姿包含的坐标和对应的权重系数确定的,所述第一航向角为所述第一位姿包含的航向角和对应的权重系数的乘积,所述第二航向角为所述第二位姿包含的航向角和对应的权重系数的乘积。6.根据权利要求1所述的方法,其特征在于,在确定所述智能设备的移动参数之前,还包括:确定所述当前位姿与所述目标位姿的位姿偏差大于第一预设偏差阈值。7.根据权利要求6所述的方法,其特征在于,所述移动参数包括移动线速度和移动角速度,在确定所述当前位姿与所述目标位姿的位姿偏差大于第一预设偏差阈值之后,还包括:若所述位姿偏差大于第二预设偏差阈值,则调大所述移动角速度,否则调小所述移动角速度,其中所述第二预设偏差阈值大于所述第一预设偏差阈值。8.一种移动参数确定装置,其特征在于,该装置包括:位姿确定模块,用于确定所述智能设备相对于预设标签的第一位姿和第二位姿,其中所述第一位姿是根据所述智能设备的图像采集装置采集的所述预设标签的信息确定的,所述第二位姿为根据所述智能设备的里程计采集的运行信息确定的;所述位姿确定模块,还用于根据所述第一位姿以及第二位姿,确定所述智能设备相对于所述预设标签的当前位姿;移动参数确定模块,用于基于所述当前位姿以及预设的目标位姿,确定所述智能设备的移动参数,所述目标位姿为表征所述智能设备到达目标位置后停止移动的位姿。9.一种智能设备,其特征在于,包括一个或多个处理器,以及用于存储所述处理器可执行指令的存储器;其中,所述处理器被配置为执行所述指令,以实现如权利要求1~7中任一项所述的移动参数确定方法。10.一种存储介质,其特征在于,所述存储介质内存储有计算机程序,所述计算机程序被处理器执行时,实现如权利要求1~7中任一项所述的移动参数确定方法。
技术总结
本公开涉及智能设备技术领域,公开了一种移动参数确定方法、装置、智能设备和存储介质,本实施例的方法包括:确定所述智能设备相对于预设标签的第一位姿和第二位姿,其中所述第一位姿是根据所述智能设备的图像采集装置采集的所述预设标签的信息确定的,所述第二位姿为根据所述智能设备的里程计采集的运行信息确定的;根据所述第一位姿以及第二位姿,较为准确地确定所述智能设备相对于所述预设标签的当前位姿;基于所述当前位姿以及预设的目标位姿,准确确定所述智能设备的移动参数,所述目标位姿为表征所述智能设备到达目标位置后停止移动的位姿。使智能设备精准地达到目标位姿,即以合适的航向角准确到达目标位置。即以合适的航向角准确到达目标位置。即以合适的航向角准确到达目标位置。
技术研发人员:曾军辉 韩松杉 刘方圆 韩亮 赵家阳 张弥
受保护的技术使用者:浙江欣奕华智能科技有限公司
技术研发日:2020.12.10
技术公布日:2022/6/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。