1.本实用新型实施例涉及机动车雷达技术领域,尤其涉及一种机动车雷达系统。
背景技术:
2.目前,现有的无主机的机动车雷达系统通常采用多个雷达探头探测障碍物信息,并输出距离信号及地址信号,然后信号总线将雷达探头输出的地址信号和距离信号传输给显示设备,显示设备根据各个雷达探头输出的地址信号的不同判断雷达探头安装于车身的位置,进而获取障碍物信息并提示驾驶者。然而,现有的这种机动车雷达系统一般只通过雷达探头的lin引脚的不同接线状态为自身分配不同的地址,因此最多只能兼容四个雷达探头,当机动车需要同时在车身的前后位置均安装多个雷达探头时,则无法实现。
3.为兼容更多数量的无主机雷达系统的方案,目前主要存在两种方案:其中一种方案通过增加雷达探头的引脚数量(例如:雷达探头设置六个引脚),从而增加雷达探头用于寻址引脚的引脚数量,但是,该方案增加了整车线束成本以及雷达探头的设计成本;另外一种方案则采用传统引脚数量的雷达探头,雷达探头采用串联式的连接方式,但是,该方案的通讯效率相对较低,而且当系统中某一个雷达探头出现故障,会导致整个系统无法工作,系统的稳定性较低。
技术实现要素:
4.本实用新型实施例要解决的技术问题在于,提供一种机动车雷达系统,兼容更多数量的雷达探头进行障碍物探测,而且成本较低,系统稳定性更强。
5.为了解决上述技术问题,本实用新型实施例提供以下技术方案:一种机动车雷达系统,包括仪表模块以及两个通过lin总线直接连接至仪表模块的雷达探头,所述两个通过lin总线直接连接至仪表模块的雷达探头被设置为主雷达探头,每个所述主雷达探头还分别通过内部数据线连接一至三个被设置为从雷达探头的雷达探头,每个主雷达探头与对应连接的从雷达探头构成一组雷达探头且不同组的雷达探头设置在机动车相对两端的预定位置,每个所述雷达探头均包括四个引脚:vcc引脚、data引脚、lin引脚和gnd引脚,单个雷达探头的四个引脚按照以下接线规则进行组合接线:
6.所述vcc引脚和所述gnd引脚分别连接至电源总线和接地总线;
7.主雷达探头的lin引脚和data引脚分别连接至lin总线和组内的内部数据线;
8.其中一组雷达探头的每个从雷达探头的data引脚择一地选择空置或者连接至接地总线或者连接至组内的内部数据线,且lin引脚均连接至组内的内部数据线,且组内的从雷达探头的数量大于或等于二时,组内的各个从雷达探头的data引脚接线方式各不相同;
9.另一组雷达探头的每个从雷达探头的data引脚均连接至组内的内部数据线,且lin引脚择一地选择空置或者连接至接地总线或者连接至组内的内部数据线,且组内的从雷达探头的数量大于或等于二时,组内的各个从雷达探头的lin引脚接线方式各不相同;
10.每组雷达探头的主雷达探头通过所述内部数据线汇总同组所有雷达探头测得的
障碍物信息并综合运算获得障碍物距离数据,再通过所述lin总线将所述障碍物距离数据发送给仪表模块。
11.进一步的,每个所述雷达探头均包括主控芯片、超声波传感器、超声波驱动电路、lin收发电路、数据收发电路、直流稳压电路和放大电路,所述直流稳压电路与超声波驱动电路和主控芯片相连,所述主控芯片一方面分别与lin收发电路和数据收发电路相连,另一方面分别通过所述超声波驱动电路和放大电路连接至超声波传感器,所述直流稳压电路引出所述vcc引脚,所述数据收发电路引出data引脚,所述lin收发电路引出所述lin引脚,所述主控芯片引出gnd引脚。
12.进一步的,所述数据收发电路包括内部电源、第一电阻r1、第二电阻r2、第三电阻r3、第四电阻r4、二极管d及三极管q,其中,内部电源通过第一电阻r1、第二电阻r2和第三电阻r3连接至接地端,所述三极管q的集电极通过第四电阻r4连接至二极管d的正极、所述data引脚以及第一电阻r1和第二电阻r2之间的线路,所述三极管q的基极和发射极分别连接至主控芯片和接地端,所述二极管d的负极连接至内部电源,所述第二电阻r2和第三电阻r3之间的线路连接至主控芯片。
13.进一步的,所述仪表模块包括:
14.存储单元,与所述lin总线相连,用于预存具有机动车的车型及车型对应雷达探头的数量和参数信息的配置码并在接收到来自主雷达探头的主控芯片的配置信息请求后将所述配置码发送给主雷达探头的主控芯片;以及
15.报警单元,与所述lin总线相连,用于在任一个所述雷达探头探测的障碍物距离数据小于预定阈值时进行报警。
16.进一步的,所述仪表模块还包括:
17.故障显示单元,与所述lin总线相连,用于在任一个所述雷达探头出现故障时进行故障显示。
18.采用上述技术方案后,本实用新型实施例至少具有如下有益效果:本实用新型实施例通过设置两组分设于机动车不同端的雷达探头,每组雷达探头包括一个作为主雷达探头且通过lin总线与仪表模块直接相连的雷达探头和一至三个作为从雷达探头通过内部数据线且与主雷达探头相连的雷达探头,并且,其中一组中的各个从雷达探头的data引脚分别采用不同的接线方式,而另一组中的各个从雷达探头的lin引脚分别采用不同的接线方式,分别通过data引脚和lin引脚实现地址分配,由此,仪表模块可以在系统上电后快速准确地识别出各个雷达探头的位置,这种连接方式扩展性强,雷达探头总数量最多可达八个,而且成本较低,系统稳定性强,可以更好地探测障碍物信息,确保行车安全。
附图说明
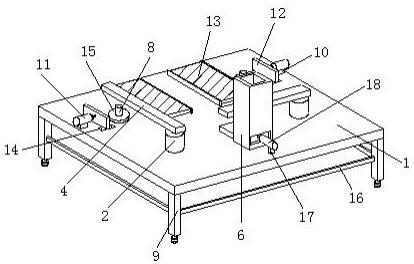
19.图1为本实用新型机动车雷达系统一个可选实施例包括八个雷达探头时的结构示意图。
20.图2为本实用新型机动车雷达系统一个可选实施例雷达探头的内部结构框图。
21.图3为本实用新型机动车雷达系统一个可选实施例数据转发电路的电路示意图。
22.图4为本实用新型实施例提供的机动车雷达系统的雷达探头自动寻址方法的步骤流程图。
23.图5为本实用新型实施例提供的机动车雷达系统的雷达探头自动寻址方法的步骤s3具体的流程图。
具体实施方式
24.下面结合附图和具体实施例对本技术作进一步详细说明。应当理解,以下的示意性实施例及说明仅用来解释本实用新型,并不作为对本实用新型的限定,而且,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互结合。
25.如图1所示,本实用新型一个可选实施例提供一种机动车雷达系统,包括仪表模块1以及两个通过lin总线3直接连接至仪表模块1的雷达探头5,所述两个通过lin总线3直接连接至仪表模块1的雷达探头5被设置为主雷达探头5a,每个所述主雷达探头5a还分别通过内部数据线50连接一至三个被设置为从雷达探头5b的雷达探头5,每个主雷达探头5a与对应连接的从雷达探头5b构成一组雷达探头5且不同组的雷达探头5设置在机动车相对两端的预定位置,每个所述雷达探头5均包括四个引脚:vcc引脚、data引脚、lin引脚和gnd引脚,单个雷达探头5的四个引脚按照以下接线规则进行组合接线:
26.所述vcc引脚和所述gnd引脚分别连接至电源总线7和接地总线9;
27.主雷达探头5a的lin引脚和data引脚分别连接至lin总线3和组内的内部数据线50;其中一组雷达探头5的每个从雷达探头5b的data引脚择一地选择空置或者连接至接地总线9或者连接至组内的内部数据线50,且lin引脚均连接至组内的内部数据线50,且组内的从雷达探头5b的数量大于或等于二时,组内的各个从雷达探头5b的data引脚接线方式各不相同;
28.另一组雷达探头5的每个从雷达探头5b的data引脚均连接至组内的内部数据线50,且lin引脚择一地选择空置或者连接至接地总线9或者连接至组内的内部数据线50,且组内的从雷达探头5b的数量大于或等于二时,组内的各个从雷达探头5b的lin引脚接线方式各不相同;
29.每组雷达探头5的主雷达探头5a通过所述内部数据线50汇总同组所有雷达探头5测得的障碍物信息并综合运算获得障碍物距离数据,再通过所述lin总线3将所述障碍物距离数据发送给仪表模块1。
30.本实用新型实施例通过设置两组分设于机动车不同端的雷达探头5,每组雷达探头5包括一个作为主雷达探头5a且通过lin总线3与仪表模块1直接相连的雷达探头5和一至三个作为从雷达探头5b通过内部数据线50且与主雷达探头5a相连的雷达探头5,并且,其中一组中的各个从雷达探头5b的data引脚分别采用不同的接线方式,而另一组中的各个从雷达探头5b的lin引脚分别采用不同的接线方式,分别通过data引脚和lin引脚实现地址分配,由此,仪表模块1可以在系统上电后快速准确地识别出各个雷达探头5的位置,这种连接方式扩展性强,雷达探头5总数量最多可达八个,而且成本较低,系统稳定性强,可以更好地探测障碍物信息,确保行车安全。
31.在具体实施时,本实用新型机动车雷达系统的雷达探头5的接线方式如下表:
[0032][0033]
另外,在具体实施时,由于data引脚为默认电平上拉,因此,data引脚连接至接地总线7,被下拉才能作为地址识别;其中,第2种和第6种所示的接线方式表示主雷达探头5a。
[0034]
在本实用新型一个可选实施例中,如图2所示,每个所述雷达探头5均包括主控芯片50、超声波传感器51、超声波驱动电路52、lin收发电路53、数据收发电路54、直流稳压电路55和放大电路56,所述直流稳压电路55与超声波驱动电路52和主控芯片50相连,所述主控芯片50一方面分别与lin收发电路53和数据收发电路54相连,另一方面分别通过所述超声波驱动电路52和放大电路56连接至超声波传感器51,所述直流稳压电路55引出所述vcc引脚,所述数据收发电路54引出data引脚,所述lin收发电路53引出所述lin引脚,所述主控芯片50引出gnd引脚。
[0035]
本实施例中,雷达探头5包括主控芯片50、超声波传感器51、超声波驱动电路52、lin收发电路53、数据收发电路54、直流稳压电路55和放大电路56,实现了对障碍物的探测,而且,通过数据收发电路54和lin收发电路53根据data引脚和lin引脚的不同外部接线状态而对应为雷达探头5接收和发送数据以及输出不同的地址信号,从而实现在id引脚的不同外部接线时,对应可以为雷达探头5内部供电、接收和发送数据以及输出地址信号。在具体实施时,所述放大电路55可以采用两级运算放大器。
[0036]
在本实用新型一个可选实施例中,如图3所示,所述数据收发电路53包括内部电源531、第一电阻r1、第二电阻r2、第三电阻r3、第四电阻r4、二极管d及三极管q,其中,内部电源531通过第一电阻r1、第二电阻r2和第三电阻r3连接至接地端,所述三极管q的集电极通过第四电阻r4连接至二极管d的正极、所述data引脚以及第一电阻r1和第二电阻r2之间的线路,所述三极管q的基极和发射极分别连接至主控芯片50和接地端,所述二极管d的负极连接至内部电源531,所述第二电阻r2和第三电阻r3之间的线路连接至主控芯片50。本实施例中,当data引脚用作地址识别时,通过第一电阻r1、第二电阻r2和第三电阻r3组成的电压采用电路,主控芯片50识别不同的电压值实现不同的地址分配;当data引脚用作收发数据时,通过第四电阻r4和三极管q组成的数据收发电路与主控芯片50进行数据交互,一个电路根据外部接线不同实现两种功能,非常的方便。在具体实施时,所述内部电源531为12v的电压源。如图4所示,图中mcu_rx为主控芯片50的数据接收引脚,mcu_tx连接至主控芯片50的数据发送引脚。
[0037]
在本实用新型一个可选实施例中,如图1所示,所述仪表模块1包括:
[0038]
存储单元10,与所述lin总线3相连,用于预存具有机动车的车型及车型对应雷达探头5的数量和参数信息的配置码并在接收到来自主雷达探头5a的主控芯片的配置信息请求后将所述配置码发送给主雷达探头5a的主控芯片50;以及
[0039]
报警单元12,与所述lin总线3相连,用于在任一个所述雷达探头5探测的障碍物距离数据小于预定阈值时进行报警。
[0040]
本实施例中,还通过存储单元10预存具有机动车的车型及车型对应雷达探头5的数量和参数信息的配置码并在接收到来自主雷达探头5a的主控芯片50的配置信息请求后将所述配置码发送给主雷达探头5a的主控芯片50,对主雷达探头5a的主控芯片50进行初始化,根据不同的机动车的车型进行不同的配置,提高了本实用新型机动车雷达系统的通用性;又通过报警单元12在任一个所述雷达探头5探测的障碍物距离数据小于预定阈值时进行报警,提醒驾驶员,保证障碍物探测的实用性。
[0041]
在本实用新型一个可选实施例中,如图1所示,所述仪表模块1还包括:
[0042]
故障显示单元14,与所述lin总线3相连,用于在任一个所述雷达探头5出现故障时进行故障显示。本实施例还通过设置故障显示单元14,在任一个所述雷达探头5出现故障时进行故障显示,实现雷达探头5的自检,方便驾驶员了解故障的存在,及时维护。
[0043]
另一方面,如图4所示,本实用新型实施例提供的机动车雷达系统的雷达探头自动寻址方法,包括以下步骤:
[0044]
s1:系统上电;
[0045]
s2:各个雷达探头5根据仪表模块1下发的识别信息自身进行反馈识别出两组分别安装于机动车不同端的主雷达探头5a;以及
[0046]
s3:每个主雷达探头5a分别先后向组内的内部数据线50发送不同指令,每个雷达探头5根据自身的data引脚和lin引脚的指令接收状况和电平状况与预存的反映所述指令接收状况、电平状况与每个雷达探头5的安装位置的对应关系的数据表分别确定每个从雷达探头5的安装位置,再根据已确定位置的从雷达探头5b确定主雷达探头5a的安装位置。
[0047]
本实施例中采用上述方法,通过先从各个雷达探头5中识别出两个主雷达探头5a,然后由于,各个从雷达探头5b的data引脚和lin引脚的指令接收状态和电平状态各不相同,自身通过判断data引脚和lin引脚的指令接收状态和电平状态即可确定每组雷达探头5的各个从雷达探头5b的位置,最后通过从雷达探头5b的位置判断出同组的主雷达探头5a的位置,寻址过程简单,寻址效率高。在具体实施实施,机动车的a端和b端可以是指机动车的车头和车尾,a、b、c、d四个位置可以分别是指左、左中、右中和右。
[0048]
另外,如图1和图5所示,每个主雷达探头5a连接有三个从雷达探头5b,所述步骤s3具体包括:
[0049]
s31:每个主雷达探头5a先分别向组内的内部数据线50发送第一指令;
[0050]
s32:各个雷达探头5中将自身lin引脚接收到所述第一指令且data引脚持续为低电平的雷达探头5识别为机动车的a端c位置的从雷达探头5b,将自身lin引脚接收到所述第一指令且data引脚持续为高电平的雷达探头5识别为机动车的a端a位置的从雷达探头5b,将自身data引脚接收到所述第一指令且lin引脚持续为低电平的雷达探头5识别为机动车的b端c位置的从雷达探头5b,将自身data引脚接收到所述第一指令且lin引脚持续为高电
平的雷达探头5识别为机动车的b端a位置的从雷达探头5b;
[0051]
s33:每个主雷达探头5a再分别向组内的内部数据线50发送控制指令控制组内位于c位置的从雷达探头5b分别向组内的内部数据线50发送第二指令;以及
[0052]
s34:各个雷达探头5中将自身位于a端c位置的从雷达探头5b发出的所述第二指令且未识别出位置的从雷达探头5b识别为机动车的a端d位置的从雷达探头5b,将自身接收到位于a端c位置的从雷达探头5b发出的所述第二指令的主雷达探头5a识别为机动车的a端b位置的主雷达探头5a,将自身接收到位于b端c位置的从雷达探头5b发出的所述第二指令且未识别出位置的从雷达探头5b识别为机动车的b端d位置的从雷达探头5b,将自身接收到位于b端c位置的从雷达探头5b发出的所述第二指令的主雷达探头5a识别为机动车的b端b位置的主雷达探头5a。
[0053]
本实施例中,当同组的从雷达探头5b的数量为三个时,由于data引脚和lin引脚在空置时均为高电平,当data引脚和lin引脚对应连接至接地总线9时,会被拉低,因此,通过a端c位置、a端a位置、b端c位置以及b端a位置的四个从雷达探头5b的lin引脚和data引脚的接线方式的不同,从而可率先确定四个从雷达探头5b的安装位置,然后通过a端c位置的从雷达探头5b和b端c位置的从雷达探头5b分别向组内的内部数据线50发送第二指令,通过判断各个雷达探头5的指令接收状况即可区分出同组剩余一个从雷达探头5b以及同组的一个主雷达探头5a,寻址过程效率高。
[0054]
另外,所述识别信息为所述仪表模块1在上电时向所述lin总线发送的lin报文。本实施例中,由于仅有主雷达探头5a通过lin总线3与仪表模块1,通过判断接收lin报文的方式,能快速准确地识别出主雷达探头5a。
[0055]
上面结合附图对本实用新型的实施例进行了描述,但是本实用新型并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本实用新型的启示下,在不脱离本实用新型宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。