1.本实用新型属于航空工程技术领域,具体涉及一种用于飞行模拟器的环形屏幕以及该环形屏幕的视角控制系统。
背景技术:
2.在对飞行员的训练过程中,力求以最短的时间、最小的代价获得最佳的训练效果。以仿真技术为核心模拟训练革命正席卷全球,已经得到各国航空业的高度重视和广泛应用。
3.模拟训练具有安全、经济、可控、可重复、无风险、不受气候条件和场地空间限制等独特优势,既能进行常规的正常操作训练,又能进行各种事故(包括灾难性事故)的特殊处置训练。
4.目前,大部分的模拟训练器采用的视景屏幕由1个及以上的平面屏组合而成,不能将飞行员的视角全部覆盖,所以不能给飞行员真实的训练感受。因此,设计一种可将飞行员视角全部覆盖的环形屏幕,给飞行员真实的模拟环境,对飞行员的心理素质训练则尤为必要。
技术实现要素:
5.针对上述存在的技术不足,本实用新型的发明目的在于提供一种用于飞行模拟器的环形屏幕以及该环形屏幕的视角控制系统,可覆盖飞行员全部视角。
6.本实用新型的发明目的通过以下技术方案实现:
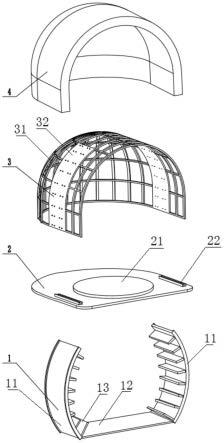
7.一种用于飞行模拟器的环形屏幕,包含:支撑架1、安装平台2、骨架3和幕布4;
8.支撑架1包含2个半环形面11和底部连廊12,2个半环形面11的底部焊接在底部连廊12的二侧连接成为一个整体;所述半环形面11内侧具有若干安装片13,用于对骨架3进行固定支撑;
9.安装平台2的整体形状与骨架底部相契合,安装平台2的四条边中,其中一条为半圆形,其余为直线形,骨架3安装在安装平台2上;
10.骨架3为钢结构件,包含框架31和若干块安装面板32,框架31和安装面板32通过螺栓连接;所述框架31下部为竖直形状,上部为半圆形形状,通过钢结构焊接而成;安装面板32上具有螺栓安装孔,用以与支撑架1上的安装片13连接;
11.所述幕布4根据框架31的内外部形状进行包裹从而形成环形屏幕。
12.优选地,环形面11两侧边沿具有向外凸起的凸台。
13.优选地,2个半环形面11的圆心同心,并且半环形面11的圆心的位置通过安装在底部连廊12上的位置进行调节。
14.优选地,支撑架1还包含顶部连廊,所述2个半环形面11的顶部焊接在顶部连廊的二侧。
15.优选地,安装平台2对称的两条直线边上设有滑槽22,用以骨架3的前后滑动;滑槽
22内具有安装孔,当骨架3位置确定好之后,通过安装孔内安装螺栓将骨架3固定在安装平台2上。
16.优选地,安装面板32与框架31安装的螺栓安装孔为槽孔,用于安装面板32在框架31上的位置进行微调。
17.优选地,环形屏幕安装在六自由度平台上。
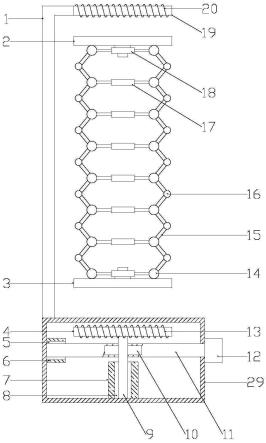
18.一种用于飞行模拟器的环形屏幕的视角控制系统,包含太网交换机、计算机设备、设备管理客户端、投影机设备、fpga和plc控制器;
19.所述以太网交换机为计算机设备、设备管理客户端、投影机设备、fpga和plc控制器的连接器;
20.所述投影机设备安装在骨架上;
21.传感器设备用于采集六自由度平台的位置信息;
22.fpga对传感器设备采集的六自由度平台的位置信息进行获取、滤波并转换成位姿信息;然后将六自由度平台的位姿信息的模拟信号转换成数字信号,将六自由度平台的位姿信息的数字信号传输给设备管理客户端;
23.所述设备管理客户端接收fpga发送的六自由度平台的位姿信息并在设备管理客户端上对六自由度平台当前位姿信息进行显示,当设备管理客户端收到外部设备或操作人员输入的六自由度平台的目标位姿信息时,将六自由度平台的目标位姿信息发送给plc控制器和计算机设备;
24.plc控制器在接收到设备管理客户端发送的六自由度平台目标位姿信息后,从fpga读取六自由度平台的当前位姿信息进行比较,得到六自由度平台的控制信息从而驱动六自由度平台运行,最终使六自由度平台达到目标位姿,同时plc控制器将当前六自由度平台的控制信息传输给设备管理客户端用以显示和监控;
25.计算机设备组在接收到设备管理客户端发送的六自由度平台目标位姿信息后生成该六自由度平台目标位姿对应的画面,并根据六自由度平台的运动状态过程实时控制投影机设备在幕布上投影,逐渐将当前画面转换至目标画面,同时计算机设备组将当前投影机设备的控制信息和画面传输给设备管理客户端用以显示和监控。
26.优选地,计算机设备组有二台计算机,一台计算机负责与设备管理客户端和投影机设备进行通讯,完成相应的控制,另一台计算机专门配置生成各种地理环境画面,供用户选择。
27.本实用新型有以下几处有益效果:
28.1、此环形屏幕可覆盖飞行员全部视角,给飞行员真实的模拟环境;
29.2、骨架整体通过钢结构焊接,安全可靠;
30.3、可根据需要对环形屏幕的位置进行调整或者更换环形屏幕,易拆卸和维护;
31.4、此结构可适用于模拟多种类型模拟器,比如飞行模拟器和任务模拟器等。
32.5、采用设备管理客户端,实现所有电气设备运行状态的集中管理,有效提高了系统自动化管理程度;
33.6、采用plc控制器接线方式灵活、安全度高、易扩展;
34.7、采用fpga采集六自由度平台位姿信息,利用fpga本身硬件优势,获取信息速度快,响应迅速。
附图说明
35.为了更清楚的说明本实用新型中的技术方案,下面将对实施例或者现有技术描述中所需要的附图做一简单介绍。显而易见的,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来说,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
36.图1为实施例提供的用于飞行模拟器的环形屏幕的整体示意图;
37.图2为实施例提供的用于飞行模拟器的环形屏幕的分解示意图;
38.图3为实施例提供的用于飞行模拟器的环形屏幕的视角控制系统原理结构图。
39.附图标记说明:
40.1-支撑架:11-半环形面,12-底部连廊,13-安装片;
41.2-安装平台:21-观察平台,22-滑槽;
42.3-骨架:31-框架,32-安装面板;
43.4-幕布。
具体实施方式
44.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合实施例和附图,对本实用新型的技术方案进行清楚、完整的描述。显然,所描述的实施例是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
45.参照图1~图2,本实施例提供的用于飞行模拟器的环形屏幕包含:支撑架1、安装平台2、骨架3和幕布4。其中,骨架3的底部通过螺栓安装在安装平台2上,安装平台2固定在支撑架上1,支撑架1对骨架3进行固定支撑,幕布4通过底部的螺钉固定在骨架3内外侧。
46.参见图2所示,所述支撑架1包含2个半环形面11和底部连廊12,2个半环形面11的底部焊接在底部连廊12的二侧连接成为一个整体;所述半环形面11内侧具有若干安装片13,用于对骨架3进行固定支撑。
47.优选地,半环形面11两侧边沿具有向外凸起的凸台,起到加强筋的作用。
48.优选地,2个半环形面11的圆心同心,并且半环形面11的圆心的位置可通过安装在底部连廊12上的位置进行调节。
49.优选地,支撑架1还包含顶部连廊,所述2个半环形面11的顶部也可以焊接在顶部连廊的二侧,以增强2个半环形面11固定骨架3的稳定性。
50.所述安装平台2的整体形状与骨架底部相契合,安装平台2的四条边中,其中一条为半圆形,其余为直线形。安装平台2的中部具有供飞行员观察的观察平台21;所述安装平台2对称的两条直线边上设计有滑槽22,用以骨架3的前后滑动,调整飞行员最佳观察视角;所述滑槽22内具有安装孔,当骨架3位置确定好之后,通过安装孔内安装螺栓将骨架3固定在安装平台2上。
51.所述骨架3为钢结构件,包含框架31和若干块安装面板32,框架31和安装面板32通过螺栓连接。所述框架31下部为竖直形状,上部为半圆形形状,通过钢结构焊接而成,可根据机型的不同调整框架31的位置或者更换框架大小。。所述安装面板32上具有螺栓安装孔,用以与支撑架1上的安装片13连接。
52.优选地,所述安装面板32与框架31安装的螺栓安装孔为槽孔,便于安装面板32在框架31上的位置进行微调。
53.优选地,所述骨架3具有屏幕成像系统的安装孔,可采用正投影或者背投影的方式进行投影。
54.所述幕布4根据框架31的内外部形状进行包裹,特别是内部圆弧面要光滑没有褶皱,从而形成环形屏幕。所述幕布通过内部设计拉绳将幕布系在钢结构架子上,然后再将钢架的外部进行蒙皮。
55.用于飞行模拟器的环形屏幕还包含转动台,安装平台中部设计有转动台安装阶梯孔,转动台安装在安装平台上,所述转动台下方设计有圆形凸台,用以与安装平台上的阶梯孔相配合,转动台在电机的驱动下可在安装平台上360
°
转动,便于模拟飞行员在驾驶飞机过程中转弯的视角仿真。
56.本实施型所示的用于飞行模拟器的环形屏幕可以很方便的安装在六自由度平台上。安装时,先将支撑架固定在六自由度平台上,再将安装平台安装在支撑架上,然后将骨架放置在安装平台上,根据飞行员在安装平台上的位置,调整好环形屏幕的位置并将骨架3固定在安装平台2和支撑架1的安装片13上,最后将幕布4固定在骨架3上。
57.作为举例说明,本实施例提供一种视角控制系统,用于对上述的用于飞行模拟器的环形屏幕显示视角进行控制,包括:fpga、传感器设备、plc控制器、设备管理客户端、以太网交换机、计算机设备组、投影机设备。
58.所述以太网交换机为计算机设备、设备管理客户端、投影机设备、fpga和plc控制器的连接器;
59.传感器设备用于采集六自由度平台的位置信息。
60.所述fpga包含滤波模块,用于对传感器设备采集的六自由度平台的位置信息进行滤波;所述fpga包含信号获取和转换单元,用于将滤波后的六自由度平台的位置信息转换成位姿信息;所述fpga包含数字信号接线盒,用于将转换的六自由度平台的位姿信息的模拟信号转换成数字信号;所述fpga通过以太网与设备管理客户端进行信息交互,将六自由度平台的位姿信息的数字信号传输给设备管理客户端。
61.所述设备管理客户端通过以太网交换机接收fpga发送的六自由度平台的位姿信息并在设备管理客户端上对六自由度平台当前位姿信息进行显示,便于操作人员实时输入六自由度平台的目标位姿信息。当设备管理客户端收到外部设备或操作人员输入的六自由度平台的目标位姿信息时,将六自由度平台的目标位姿信息通过以太网发送给plc控制器和计算机设备。外部设备是指座舱内的控制设备,比如飞行员操作了座舱内某些设备,让飞机右转弯,六自由度平台的位姿需要进行对应的调整。
62.通过plc控制器内的通讯模块和以太网交换机建立plc控制器和设备管理客户端、fpga之间的通讯。所述plc控制器内的数字量输入模块在接收到设备管理客户端发送的六自由度平台目标位姿信息后,从fpga读取六自由度平台的当前位姿信息进行比较,得到六自由度平台的控制信息,plc控制器内的数字量输出模块将六自由度平台的控制信息输出给六自由度平台从而驱动六自由度平台运行,最终使六自由度平台达到目标位姿,同时数字量输出模块将当前六自由度平台的控制信息传输给设备管理客户端用以显示和监控。
63.计算机设备组在接收到设备管理客户端发送的六自由度平台目标位姿信息后生
成该六自由度平台目标位姿对应的画面,并根据六自由度平台的运动状态过程实时控制投影机设备在幕布上投影,逐渐将当前画面转换至目标画面。计算机设备组可以一台是计算机,也可以是多台,例如由一台计算机上的软件负责与设备管理客户端和投影机设备进行通讯,完成相应的控制,由一台计算机专门配置生成各种地理环境画面(比如设置沙漠环境、海洋环境等),供用户选择。同时计算机设备组将当前投影机设备的控制信息和画面传输给设备管理客户端用以显示和监控。
64.所述投影机设备安装在所述骨架上,根据计算机设备组的控制投放画面,为飞行人员提供逼真的座舱外景象。
65.可见,在本发明的视角控制系统中,首先是利用传感器设备获取目标六自由度平台的位置信息,并且利用fpga本身所具有的硬件优势快速获取、滤波并转换成六自由度平台的位姿信息,然后通过以太网交换机利用plc控制器将fpga实时采集到的传感器反馈信号发送给设备管理客户端,设备管理客户端通过以太网交换机给投影机设备发送指令,最终实现六自由度平台的姿态信息与投影机设备的画面信息保持一致。
66.以上所举实施例为本发明的较佳实施方式,仅用来方便说明本发明,并非对本发明作任何形式上的限制,任何所属技术领域中具有通常知识者,若在不脱离本发明所提技术特征的范围内,利用本发明所揭示技术内容所作出局部更动或修饰的等效实施例,并且未脱离本发明的技术特征内容,均仍属于本发明技术特征的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。