1.本发明涉及车路协同自动驾驶领域,特别是涉及一种虚拟道路配置模块。
背景技术:
2.目前市场上拥有自动驾驶功能的汽车越来越多,而自动驾驶需要构建虚拟车道辅助,对道路识别和构建的精准程度保证了自动驾驶的安全性。现有技术中多数自动驾驶是依靠实时的道路识别来辅助自动驾驶,但是在异常天气道路场景下,如在雨雪覆盖道路,是无法完成实时识别道路的;再比如没有标线的路段,也无法通过实时识别道路来辅助自动驾驶,更无法保证自动驾驶的安全性,迫切需要一种构建虚拟车道的系统以解决极端天气或场景下无法识别车道的问题,辅助车辆进行车道保持,提高自动驾驶的安全性,为智能网联车辆提供、补充和/或增强自动驾驶功能。
技术实现要素:
3.本发明的目的是提供一种虚拟道路配置模块,以解决上述现有技术存在的问题。
4.为实现上述目的,本发明提供了如下方案:
5.本发明提供一种虚拟道路配置模块,包括:
6.虚拟行车单元模块,用于构建若干种道路下的虚拟行车单元;
7.虚拟行车车道模块,用于沿行驶方向连接虚拟行车单元以形成虚拟行车车道;
8.虚拟行车车道组模块,用于将多条平行的所述虚拟行车车道组合成虚拟行车车道组;
9.虚拟行车网格模块,用于沿行驶方向连接多个所述虚拟行车单元以形成虚拟行车网格,车辆在所述虚拟行车网格上执行纵向和横向移动。
10.可选的,所述虚拟行车单元的宽度为一个车道,在直线路段的长度为1-50m,在弯道处的长度为1-20m。
11.可选的,构建若干种道路下的虚拟行车单元的过程中还包括:
12.选择两个网联参考信标crm,将其中一个所述crm作为第一crm,另一个作为第二crm;
13.识别道路行车道;
14.识别由道路行车车道的车道宽度分隔的第一条道路分割线和第二条道路分割线;
15.基于所述第一crm获得第一条参考线,其中所述第一条参考线垂直于所述第一条道路分割线和所述第二条道路分割线;
16.基于所述第二crm获得第二条参考线,其中所述第二条参考线垂直于所述第一条道路分割线和所述第二条道路分割线;
17.识别第一条参考线与所述第一条道路分割线相交的交点,作为第一参考点;
18.识别第二条参考线与所述第一条道路分割线相交的交点,作为第二参考点;
19.识别第一条参考线与所述第二条道路分割线相交的交点,作为第三参考点;
20.识别第二条参考线与所述第二条道路分割线相交的交点,作为第四参考点;
21.连接第一参考点与第二参考点获得第一条虚拟分割线;
22.连接第三参考点与第四参考点获得第二条虚拟分割线。
23.基于所述第一条参考线、所述第二条参考线、所述第一条虚拟分割线和所述第二条虚拟分割线构成矩形状的虚拟行车单元。
24.可选的,所述车道宽度为3.6米。
25.可选的,所述第一crm和所述第二crm是相邻的crm。
26.可选的,所述第一crm和所述第二crm是crm网络中最接近在所述道路行车道上行驶车辆的两个crm。
27.可选的,还包括使用为第一行车道提供的第一虚拟行车单元为第二行车道提供第二虚拟行车单元,其中所述第二虚拟行车单元平行于所述第一虚拟行车单元并且所述第二虚拟行车单元与所述第一虚拟行车单元的尺寸相同。
28.可选的,包括重复所述方法为多个行车道提供多个并行虚拟行车单元。
29.可选的,若干种道路包括常规道路、交叉口、环岛、入口匝道段、出口匝道段、立交车道段、合流区、分流区和交织区。
30.可选的,所述虚拟道路配置模块(vrcm)定义了用于在交叉口转弯运动的虚拟行车单元,并且所述虚拟行车单元为从转弯起点到转弯终点的行车道的区域。
31.可选的,所述虚拟道路配置模块(vrcm)定义了用于在环岛转弯运动的虚拟行车单元,并且所述虚拟行车单元为从转弯起点到转弯终点的行车道的区域。
32.可选的,所述虚拟道路配置模块(vrcm)为入口匝道段、出口匝道段和/或立交车道段定义虚拟行车单元,并且所述虚拟行车单元为从入口匝道段、出口匝道段和/或立交车道段的起点到终点的行车道的区域。
33.可选的,所述虚拟道路配置模块(vrcm)定义用于合流区、分流区和/或交织区的虚拟行车单元,并且所述虚拟行车单元为从合流区、分流区和/或交织区的起点到终点的行车道区域。
34.本发明公开了以下技术效果:
35.本发明通过虚拟行车单元模块来构建虚拟行车单元,再通过本技术中的虚拟行车车道模块模拟车辆沿行驶方向连接形成的虚拟行车车道,通过虚拟行车车道组模块将多条平行的所述虚拟行车车道组合成虚拟行车车道组,通过虚拟行车网格模块将沿行驶方向连接多个虚拟行车单元以形成虚拟行车网格,车辆在虚拟行车网格上执行纵向和横向移动。本技术提供虚拟行车车道,当所述实际行车车道被遮挡,或者当道路和道路标记不能被车路协同自动驾驶系统(cavh)传感器或智能网联自动驾驶车辆(cav)传感器光学检测时,虚拟地标记出实际行车车道。
附图说明
36.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
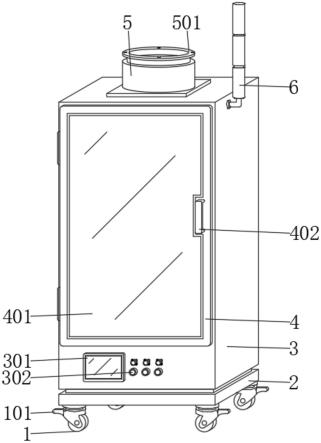
37.图1为本发明实施例中的结构示意图;
38.图2为本发明实施例中的虚拟道路配置模块的设计及组成示意图;
39.图3为本发明实施例中的交叉口虚拟行车单元的识别方法示意图;
40.图4为本发明实施例中的单条虚拟行车车道的识别方法示意图;
41.图5为本发明实施例中的雪地场景下虚拟行车车道的识别示例图,其中(a)为没有积雪覆盖的道路,(b)为存在积雪的道路,(c)为在存在积雪的道路上完成的虚拟车道识别示例;
42.图6为本发明实施例中的多条虚拟行车车道的识别方法示意图;
43.图7为雪地场景下虚拟行车车道组的识别示例图,其中(a)为没有积雪覆盖的道路,(b)为存在积雪的道路,(c)和(d)为在存在积雪的道路上完成的虚拟车道组识别示例;
44.图8为本发明实施例中的多车道虚拟行车网格识别方法示意图。
具体实施方式
45.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
46.本发明提供了一种虚拟道路配置模块vrcm,包括以下子组件:虚拟行车单元模块、虚拟行车车道模块、虚拟行车车道组模块和/或虚拟行车网格模块。虚拟道路配置模块vrcm利用网联参考信标crm系统开发虚拟道路配置。
47.对于直道或者弯道路段,虚拟行车单元模块执行算法来配置虚拟行车单元,该虚拟单元具有一个标准车道的宽度例如9-15英尺,示例如下:
48.9.0,9.1,9.2,9.3,9.4,9.5,9.6,9.7,9.8,9.9,10.0,10.1,10.2,10.3,10.4,10.5,10.6,10.7,10.8,10.9,11.0,11.1,11.2,11.3,11.4,11.5,11.6,11.7,11.8,11.9,12.0,12.1,12.2,12.3,12.4,12.5,12.6,12.7,12.8,12.9,13.0,13.1,13.2,13.3,13.4,13.5,13.6,13.7,13.8,13.9,14.0,14.1,14.2,14.3,14.4,14.5,14.6,14.7,14.8,14.9或15.0英尺;
49.长度范围从车辆长度到50米,例如:
50.1.0,1.5,2.0,2.5,3.0,3.5,4.0,4.5,5.0,5.5,6.0,6.5,7.0,7.5,8.0,8.5,9.0,9.5,10.0,10.5,11.0,11.5,12.0,12.5,13.0,13.5,14.0,14.5,15.0,15.5,16.0,16.5,17.0,17.5,18.0,18.5,19.0,19.5,20.0,20.5,21.0,21.5,22.0,22.5,23.0,23.5,24.0,24.5,25.0,25.5,26.0,26.5,27.0,27.5,28.0,28.5,29.0,29.5,30.0,30.5,31.0,31.5,32.0,32.5,33.0,33.5,34.0,34.5,35.0,35.5,36.0,36.5,37.0,37.5,38.0,38.5,39.0,39.5,40.0,40.5,41.0,41.5,42.0,42.5,43.0,43.5,44.0,44.5,45.0,45.5,46.0,46.5,47.0,47.5,48.0,48.5,49.0,49.5,45.0或50.0米;
51.直线路段的长度从车辆长度到20米,例如:
52.1.0,1.5,2.0,2.5,3.0,3.5,4.0,4.5,5.0,5.5,6.0,6.5,7.0,7.5,8.0,8.5,9.0,9.5,10.0,10.5,11.0,11.5,12.0,12.5,13.0,13.5,14.0,14.5,15.0,15.5,16.0,16.5,17.0,17.5,18.0,18.5,19.0,19.5或20.0米;
53.对于弯道路段,虚拟行车单元的最小长度是适合容纳一辆车的长度。
54.虚拟道路配置模块vrcm包括虚拟行车单元识别模块vdcim,虚拟行车单元识别模块vdcim执行用于定义虚拟行车单元的方法。
55.定义虚拟行车单元的方法包括由虚拟行车单元识别模块vdcim选择两个网联参考信标crms以提供第一个网联参考信标crm和第二个网联参考信标crm,其中两个网联参考信标crms例如:两个相邻的网联参考信标crms。
56.定义虚拟行车单元的方法包括确定第一条道路行车道;例如,使用车道宽度和/或由车道宽度定义的第一条道路分割线和第二条道路分割线。
57.本方法包括通过虚拟行车单元识别模块vdcim绘制来自第一个网联参考信标crm的垂直于第一条预先测量的实际道路分割线的第一条参考线,以及通过虚拟行车单元识别模块vdcim绘制来自第二个网联参考信标crm的垂直于第二条预先测量的实际道路分割线的第二条参考线。
58.通过虚拟行车单元识别模块vdcim识别两个参考点的位置,其中两条参考线与预先测量的实际道路分割线相交。因此,通过虚拟行车单元识别模块vdcim识别第一条参考线与第一条预测实际道路分割线相交的第一个参考点的位置,虚拟行车单元识别模块vdcim识别第二条参考线与第二条预测实际道路分割线相交的第二个参考点的位置。
59.本发明包括通过虚拟行车单元识别模块vdcim连接第一个参考点和第二个参考点以提供第一条虚拟分割线;包括使用车道宽度和/或由车道宽度定义的提供第二条虚拟分割线;包括定义和/或提供第一条参考线、第二条参考线、第一条虚拟分割线和第二条虚拟分割线限定的矩形形状形成的虚拟行车单元。
60.用于定义虚拟行车单元的方法针对多个额外的道路行车道,例如,第二、第三、第四、第五、第六、第七、第八、第九、第十、第十一、第十二、第十三、第十四、第十五、第十六或第n条附加车道。本发明包括由虚拟行车单元识别模块vdcim使用为第一行车道提供的虚拟行车单元作为为第二道路行车道绘制第二虚拟行车单元的基础,例如通过提供第二虚拟行车单元由平行于第一虚拟行车单元并使用车道宽度和/或由车道宽度定义的矩形形状形成的驾驶单元,例如,第二车道行车道的车道宽度。
61.对于所有行车道重复该方法驾驶车道以使用crms为所有驾驶车道提供虚拟行车单元。
62.对于交叉口的转弯运动,包括左转、右转和u形转弯运动,虚拟行车单元为从转弯起点到转弯终点的行车道区域。
63.对于环岛的转弯运动,包括左转、右转和u形转弯运动,虚拟行车单元为行车道从转弯起点到转弯终点的行车道区域。
64.对于入口匝道、出口匝道和立交道路部分,虚拟行车单元分别从入口匝道、出口匝道和立交道路部分的起点到终点的行车道区域。
65.对于合流、分流和交织路段,虚拟行车单元分别从合流、分流和交织运动的起点到终点的行车道区域。
66.在一些实施例中,对于aashto的“a policy on geometric design of highways and streets”中定义的任何其他类型的道路路段,虚拟行车单元为从行车道起点到终点的区域如aashto参考中定义的其他类型的道路段。
67.对于单个行车车道,虚拟行车车道模块沿行驶方向连接虚拟行车单元,形成虚拟行车车道。对于多个行车车道,虚拟行车车道组模块组合平行的虚拟行车车道并形成虚拟行车车道组。
68.对于具有单个和/或多个行车车道的道路,虚拟行车网格模块沿着驾驶方向连接虚拟行车单元的网络以形成虚拟行车网格,其中驾驶方向包括纵向和横向,车辆在虚拟行车网格上执行纵向和横向运动。
69.虚拟行车车道虚拟地标记实际驾驶车道,例如,在极端天气例如,雪、雨、冰雹、尘暴、沙暴)情况下或当实际驾驶车道以其他方式(道路损毁、道路施工、和/或路面有抛洒物等)被遮挡时,或者当道路和道路标记不能被车路协同自动驾驶系统(cavh)传感器或智能网联自动驾驶车辆(cav)传感器光学检测时,虚拟地标记出实际行车车道。
70.当道路行车道被遮挡或无法识别时,虚拟行车单元识别模块vdcim绘制相应的参考线并识别出的参考点的位置,其位置在网联参考信标crm感应范围内。然后,虚拟行车单元识别模块vdcim连接这些识别的参考点以生成识别的虚拟行车分割线黑色虚线。在已识别的虚拟行车分割线作为参考基线生成后,虚拟行车单元识别模块vdcim根据预先设计的车道宽度计算出参考点的位置,并连接这些计算出的参考点以生成计算出的虚拟行车分割线黑色虚线。
71.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。