一种基于mobilenet-v2神经网络的机场雾天能见度分类方法
技术领域
1.本发明属于深度学习领域,具体涉及一种基于mobilenet-v2神经网络的机场雾天能见度分类方法。
背景技术:
2.能见度对飞行安全非常重要,在航空领域,当机场能见度只有400米左右时,会禁止航班起降。当机场能见度只有600-800米左右时航班虽然可以正常起降。但出于安全考虑,机场会采取临时控制航班流量的措施,拉大航班起飞间隔,容易造成航班延误。因此,能见度预测是高速公路管理部门和航空公司十分关注的问题,迫切需要开展能见度检测研究。
3.激光能见度仪是常用的检测能见度的仪器,但由于采样面积小、价格高、操作复杂等原因,能见度仪无法大规模复制。近年来,基于视频的能见度检测方法受到人们的关注,它某种程度上克服了激光能见度仪的不足。视频能见度检测方法是将大气光学分析与图像处理及人工智能技术结合,通过对视频图像的分析处理,建立视频图像与真实场景之间的关系,再根据图像特征的变化,间接计算出能见度数值。但现有的基于视频图像的能见度检测方法,由于是间接计算,很难准确地估算能见度。特别地,这些方法中大多数只选取少量视频、截取图像中的某些固有特征,基于koschmieder定律进行估计,并没有充分利用视频的连续信息,所以估计的精度不高,有较大的改进空间。此外,现有的方法需要依靠强大的计算能力作为支撑,在计算资源有限且存储空间有限的移动端设备部署困难重重。因此,一种能够部署到移动端设备,且具备分类准确率高的能见度分类方法是本领域研究人员十分关注的问题。
技术实现要素:
4.发明目的:针对传统卷积神经网络参数量多,部署占用资源大的问题,本发明提出了一种基于mobilenet-v2神经网络机场雾天能见度分类方法。
5.技术方案:本发明提出一种基于mobilenet-v2神经网络的机场雾天能见度分类方法,该方法包括如下步骤:
6.首先是获取数据集,本数据集对真实机场场景进行拍摄采集,同时使用激光能见度仪记录下采集时刻的能见度,将采集的图像与所记录的能见度一一对应,并根据能见度将图像划分为五个类别,分别是:低能见度、中低能见度、中能见度、中高能见度、高能见度,分类标准是以能见度大小进行划分。
7.使用canny边缘检测算法对划分后的图像进行边缘提取。通过canny边缘检测算法输出的图像为图像的边缘特征图,当图像能见度越高,对应输出的图像边缘特征越多,当图像能见度越小,则对应输出的图像边缘特征越少。此外,由于canny边缘检测算法输出的图像为二值图,这样就可以避免偏色图像导致网络训练效果不佳的问题。经canny边缘检测算法处理后的图像能够更好的带入神经网络中进行训练。
8.使用tensorflow框架,搭建基础的mobilenet-v2神经网络模型并修改模型配置。在基础的mobilenet-v2网络模型末尾加入一层7
×
7的平均池化层、随后加入含有1024个神经元的全连接层,最后选用softmax作为mobilenet-v2神经网络的激活函数,输出分类结果。
9.搭建好mobilenet-v2神经网络模型后,将测试集图像输出模型中进行训练。选用mobilenet-v2神经网络在imagenet上所训练好的模型,通过迁移学习的方法,继续在本数据集上训练,从而提高模型的收敛速度,防止过拟合。设置sgd优化器训练mobilenet-v2模型,学习率为0.01,动量为0.01,权重衰减为1
×
10-6
。模型共迭代10000次,并根据分类准确率保存最佳模型作为模型的最终训练结果。
10.将采集到的雾天机场图像与能见度数据经过步骤二处理后输入到最优分类模型中得到机场雾天能见度分类结果。
11.有益效果:与现有技术相比,本发明的技术方案具有以下有益技术效果:
12.在预处理图片时加入canny边缘检测算法,降低了数据的噪声,提高分类准确率;本发明使用了网络参数量更少、同时分类准确率更高的mobilenet-v2神经网络,既减少了部署资源占用,又提高了能见度分类准确率,同时满足可在移动端设备部署。
附图说明
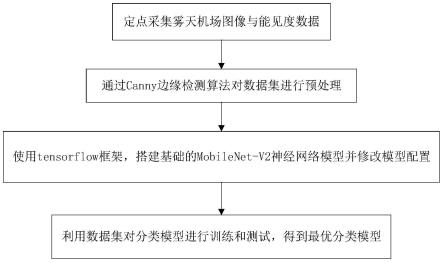
13.图1:本发明所述一种基于mobilenet-v2神经网络的机场雾天能见度分类方法的流程图。
具体实施方式
14.下面结合附图和具体实施方式,对本发明做进一步地说明。如图1所示,本发明提出一种基于mobilenet-v2神经网络的机场雾天能见度分类方法,所述方法包括以下步骤:
15.步骤一:定点采集雾天机场图像与能见度数据;
16.步骤二:通过canny边缘检测算法对数据集进行预处理;
17.步骤三:使用tensorflow框架,搭建基础的mobilenet-v2神经网络模型并修改模型配置;
18.步骤四:利用数据集对分类模型进行训练和测试,得到最优分类模型;
19.步骤五:将采集到的雾天机场图像与能见度数据经过步骤二处理后输入到最优分类模型中得到机场雾天能见度分类结果。
20.其中,步骤一所述的获取数据集包括以下步骤:
21.步骤一:通过拍摄机每隔15秒场定点拍摄图像,并通过激光能见度仪,录下拍摄时机场能见度;
22.步骤二:将定点拍摄的图像与能见度仪所记录的能见度一一对应;
23.步骤三:根据能见度分类指标将步骤三中的图片分为五个类别。
24.其中,步骤二所述的通过canny边缘检测算法对数据集进行预处理,包括以下步骤:
25.步骤一:通过高斯滤波器,对图像进行卷积,使得图像平滑,降低边缘检测上明显的噪声影响,经过高斯滤波后图像的灰度值将变为:
[0026][0027]
其中x、y分别代表像素点的位置,f(x,y)代表该像素点的灰度值,σ为图像像素点灰度值的方差;
[0028]
步骤二:使用sobel算子计算水平和垂直方向上的梯度g
x
、gy:
[0029]gx
=f(x,y)*sobel
x
[0030]gy
=f(x,y)*sobely[0031][0032][0033]
进一步得到图像的梯度g和方向θ:
[0034][0035][0036]
其中,f(x,y)为一个3
×
3窗口的灰度值,sobel
x
是sobel算子在x方向上的值,sobely是sobel算子在y方向的值,arctan为反正切函数;
[0037]
步骤三:应用非极大值抑制,消除边缘检测带来的杂散响应,保留局部最大梯度而抑制所有其他梯度值,对梯度图像中每隔像素进行非极大值抑制的算法是:将当前的像素的梯度强度与沿正负梯度方向上的两个像素进行比较,如果当前像素的梯度强度与另外两个像素相比最大,则该像素点保留为边缘点,否则像素点将被抑制,具体公式如下:
[0038][0039]
其中,g
p
代表p点的梯度值,g
p1
代表p沿正方向梯度方向上的梯度值,g
p2
代表p沿负方向上的梯度值;
[0040]
步骤四:应用双阈值剔除噪声点,即设定第一阀值和第二阀值区分边缘像素点,如果边缘像素点梯度值大于第一阀值,则被认为是强边缘点;如果边缘梯度值小于第一阀值且大于第二阀值,则标记为弱边缘点,小于第二阀值的点则被抑制掉,所述第一阈值大于第二阈值。
[0041]
其中,步骤三中使用tensorflow框架,搭建基础的mobilenet-v2神经网络模型并修改模型配置,包括以下步骤:
[0042]
步骤一:使用tensorflow框架,搭建基础的mobilenet-v2神经网络;
[0043]
步骤二:修改原有模型,在网络末端加入一层7
×
7平均池化层;
[0044]
步骤三:在平均池化层后添加神经元个数为1024的全连接层;
[0045]
步骤四:设置softmax作为mobilenet-v2神经网络的损失函数,定义为:
[0046][0047]
其中,m代表类别数量,yc为指标变量,pc代表观测样本为数据类别c的概率。
[0048]
其中,步骤四所述的利用数据集对分类模型进行训练和测试,得到最优分类模型,包括以下步骤:
[0049]
步骤一:通过迁移学习的方法,将224
×
224
×
3规格的图片输入到mobilenet-v2神经网络模型中,以图片对应的能见度分类级别作为目标进行训练;
[0050]
步骤二:设置sgd优化器训练mobilenet-v2模型,学习率为0.01,动量为0.01,权重衰减为1
×
10-6
;
[0051]
步骤三:训练过程中,最大迭代次数设置为10000次,并根据分类准确率保存最佳模型作为模型的最终训练结果。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。