1.本技术实施例涉及图像识别技术领域,特别涉及一种轨迹追踪方法、装置及计算机存储介质。
背景技术:
2.近年来,监控设备在生活中已经大量普及。在道路交通、商场门店诸多场景中,往往在不同位置按照多个监控设备,以覆盖完整的区域。
3.目前的轨迹追踪技术大都是基于单个监控视频来实现的,而在实际应用中,为了寻找和定位特定的目标,通常需要查看多路监控视频才能确定,因此,需要耗费大量的时间成本和人力成本,针对多路监控视频的追踪结果进行整合。
4.有鉴于此,需要一种可整合多路监控视频的轨迹追踪技术,以克服现有技术中存在问题。
技术实现要素:
5.鉴于上述问题,本技术提供一种轨迹追踪方法、装置及计算机存储介质,可支持多路监控视频的轨迹追踪,并轨迹追踪结果的准确性。
6.本技术第一方面提供一种轨迹追踪方法,包括:将每一个目标对象的底库特征与至少一个轨迹特征进行关联,以构建每一个目标对象的身份关联信息;根据每一个目标对象的至少一个轨迹特征,识别从不同目标视频中获取的每一个检测特征,确定每一个检测特征对应的目标对象;根据每一个目标对象的身份关联信息、每一个检测特征对应的目标对象,利用待查询对象的轨迹特征与底库特征中的任意一个,获取所述待查询对象的所有检测特征,据以生成所述待查询对象的轨迹追踪结果。
7.本技术第二方面提供一种轨迹追踪装置,包括:关联模块,用于将每一个目标对象的底库特征与至少一个轨迹特征进行关联,以构建每一个目标对象的身份关联信息;识别模块,用于根据每一个目标对象的至少一个轨迹特征,识别从不同目标视频中获取的每一个检测特征,确定每一个检测特征对应的目标对象;追踪模块,用于根据每一个目标对象的身份关联信息、每一个检测特征对应的目标对象,利用待查询对象的轨迹特征与底库特征中的任意一个,获取所述待查询对象的所有检测特征,据以生成所述待查询对象的轨迹追踪结果。
8.本技术第三方面提供一种计算机存储介质,所述计算机存储介质中存储有用于执行上述第一方面所述的方法中各步骤的各指令。
9.综上所述,本技术各实施例提供的轨迹追踪方法,通过构建用于标识目标对象的底库特征与至少一个轨迹特征的关联关系的身份关联信息,并根据目标对象的不同轨迹特征,确定从不同目标视频中获取的每一个检测特征对应的目标对象,并可利用待查询对象的轨迹码与底库码中的任意一个,获取待查询对象的所有检测特征,据以生成待查询对象的轨迹追踪结果。据此,本技术获取待查询对象对应于不同目标视频的轨迹追踪结果,借以
提高轨迹追踪结果的准确性及完整性。
附图说明
10.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术实施例中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
11.图1为本技术示例性实施例的轨迹追踪方法的流程示意图。
12.图2为本技术轨迹追踪方法的应用实施例示意图。
13.图3为本技术另一示例性实施例的轨迹追踪方法的流程示意图。
14.图4为本技术另一示例性实施例的轨迹追踪方法的流程示意图。
15.图5为本技术另一示例性实施例的轨迹追踪方法的流程示意图。
16.图6为本技术另一示例性实施例的轨迹追踪方法的流程示意图。
17.图7为本技术另一示例性实施例的轨迹追踪方法的流程示意图。
18.图8为本技术示例性实施例的轨迹追踪装置的结构框图。
具体实施方式
19.为了使本领域的人员更好地理解本技术实施例中的技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术实施例一部分实施例,而不是全部的实施例。基于本技术实施例中的实施例,本领域普通技术人员所获得的所有其他实施例,都应当属于本技术实施例保护的范围。
20.目前的轨迹追踪技术大都是基于单个监控视频来实现的,而在实际应用中,为了寻找和定位特定的目标,通常需要查看多路监控视频才能确定。有鉴于此,本技术提供一种轨迹追踪方法,可整合多路监控视频来生成待查询对象的轨迹追踪结果。
21.以下将结合各附图,详细描述本技术的各实施例。
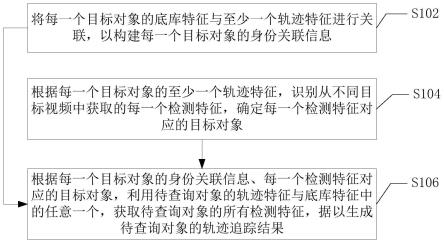
22.图1为本技术示例性实施例的轨迹追踪方法的流程示意图。如图所示,本实施例的轨迹追踪方法主要包括以下步骤:
23.步骤s102,将每一个目标对象的底库特征与至少一个轨迹特征进行关联,以构建每一个目标对象的身份关联信息。
24.于本实施例中,每个底库特征具有相应的底库码,每个轨迹特征具有相应的轨迹码。
25.于本实施例中,一个目标对象可具有一个底库特征(底库码),一个底库特征(底库码)可与一个或多个轨迹特征(轨迹码)进行关联,即目标对象的身份关联信息可为一对一的对应关联关系或一对多的对应关联关系。
26.具体地,当同一目标对象出现在多个目标区域的情况下,则此目标对象可能具有多个轨迹特征(轨迹码)。
27.例如,在图2所示示例中,轨迹池中的轨迹特征a、轨迹特征d均与目标对象a的底库特征a相匹配,因此,可将轨迹特征a的轨迹码a、轨迹特征d的轨迹码d与底库特征a的底库码a进行关联,以构成目标对象a的身份关联信息;轨迹池中的轨迹特征b、轨迹特征c均与目标
对象b的底库特征b相匹配,因此,可将轨迹特征b的轨迹码b、轨迹特征c的轨迹码c与底库特征b的底库码b对应关联,以构成目标对象b的身份关联信息;轨迹池中的轨迹特征e与目标对象c的底库特征c相匹配,因此,可将轨迹特征e的轨迹码e与底库特征c的底库码c对应关联,以构成目标对象c的身份关联信息。
28.步骤s104,根据每一个目标对象的至少一个轨迹特征,识别从不同目标视频中获取的每一个检测特征,确定每一个检测特征对应的目标对象。
29.可选地,可利用设置在各目标区域的各监控设备,获得各目标区域对应的各目标视频。
30.例如,在图2所示的示例中,可利用设置在目标区域a的监控设备a,获取目标区域a对应的目标视频a,利用设置在目标区域b的监控设备b,获取目标区域b对应的目标视频b,以此类推。
31.可选地,可识别目标视频中的未知对象,获取未知对象的检测特征,再利用轨迹池中的各个轨迹特征,针对检测特征中的未知对象进行识别,以确定检测特征对应的轨迹码。
32.步骤s106,根据每一个目标对象的身份关联信息、每一个检测特征对应的目标对象,利用待查询对象的轨迹特征与底库特征中的任意一个,获取待查询对象的所有检测特征,据以生成待查询对象的轨迹追踪结果。
33.于本实施例中,基于所构建的每一个目标对象的身份关联信息,通过输入待查询对象的轨迹特征(或轨迹码)、底库特征(或底库码)中的任意一个,即可获得待查询对象的所有检测特征,并根据所获得的每一个检测特征,可推理出待查询对象曾经访问过的各个目标区域,据以获得待查询对象完整的移动轨迹。
34.综上所述,本实施例提供的轨迹追踪方法,通过关联目标对象的底库特征与至少一个轨迹特征,并基于各轨迹特征针对不同目标视频中的未知对象的身份进行识别,以确定各目标视频对应的各目标对象,并通过输入待查询对象的轨迹特征与底库特征中的任意一个,即可查询出待查询曾经访问过的所有目标区域的移动轨迹。因此,本技术的轨迹追踪方案可以支持多路监控视频的轨迹追踪,以提高轨迹追踪结果的完整性以及准确性。
35.图3示出了本技术另一示例性实施例的轨迹追踪方法的处理流程图。本实施例为上述步骤s104的具体实施方案。如图所示,本实施例主要包括以下步骤:
36.步骤s302,将一个目标视频确定为当前视频。
37.例如,可将如图2所示的一个监控设备(例如监控设备a至监控设备d中的任意一个)输入的目标视频(例如目标视频a至目标视频d中的任意一个)确定为当前视频。
38.步骤s304,根据预设帧间隔,依次获取当前视频中的一个视频帧,以作为当前视频帧。
39.可选地,可根据预设帧间隔(例如5秒/帧),从当前的视频流中依次截取一帧视频图像,以作为当前视频帧。
40.步骤s306,检测当前视频帧中的每一个未知对象,获取每一个未知对象的检测特征。
41.于本实施例中,一个当前视频帧中可能包含有一个或多个未知对象。
42.于本实施例中,可例如通过ssd检测器(单目多目标检测器),检测当前视频帧中的每一个未知对象,可以获得每一个未知对象的对象检测框,并利用训练好的reid(行人重识
别)模型提取每一个对象检测框内的图像信息,输出具有固定维度的特征向量作为未知对象的特征表示,从而获得每一个未知对象的检测特征。
43.例如,参考图2,可根据从目标视频a所获取的当前视频帧执行检测,获得未知对象a的检测特征a和未知对象b的检测特征b;根据从目标视频b所获取的当前视频帧执行检测,获得未知对象c的检测特征c,以此类推。
44.步骤s308,将每一个未知对象的检测特征和每一个轨迹特征进行匹配,以确定每一个检测特征的轨迹码。
45.可选地,可依次获取一个未知对象的检测特征,以作为当前检测特征,将当前检测特征与轨迹池中的每一个轨迹特征执行匹配,并根据与当前检测特征匹配的轨迹特征的轨迹码,确定当前检测特征的轨迹码。
46.例如,若当前检测特征为图2所示的检测特征d,通过将检测特征d与轨迹池中的每一个轨迹特征进行匹配,获得与之相匹配的轨迹特征d,并基于轨迹特征d的轨迹码d,确定轨迹特征d(即未知对象d)的轨迹码d。
47.步骤s310,判断是否当前视频的所有视频帧均检测完毕,若是,则进行步骤s312,若否则返回步骤s304继续执行。
48.步骤s312,判断是否所有目标视频均检测完毕,若是,则结束本流程,否则返回步骤s302继续执行。
49.综上所述,本实施例的轨迹追踪方法,通过将未知对象的检测特征与各个轨迹特征进行匹配,据以识别未知对象的身份信息,具有识别结果准确且识别处理效率高的优点。
50.图4示出了本技术另一示例性实施例的轨迹追踪方法的处理流程。本实施例为上述步骤s308的具体实施方案,如图所示,本实施例主要包括以下步骤:
51.步骤s402,基于第一匹配阈值、第二匹配阈值,针对每一个未知对象的检测特征与每一个轨迹特征,分别执行两次匹配,获得每一个检测特征的第一匹配结果和第二匹配结果。
52.可选地,根据每一个未知对象的检测特征与每一个轨迹特征,所执行的两次匹配可为匈牙利匹配。
53.可选地,可计算每一个检测特征与每一个轨迹特征之间的相似度,获得每一个检测特征与每一个轨迹特征之间的相似度值,并根据每一个检测特征与每一个轨迹特征之间的相似度值,获得相似度代价矩阵,再根据相似度代价矩阵、第一匹配阈值,执行第一次匈牙利匹配,获得第一匹配结果,且根据相似度代价矩阵、第二匹配阈值,执行第二次匈牙利匹配,获得第二匹配结果。
54.例如,假设轨迹特征的数量为m,检测特征的数量为n,则根据每一个检测特征与每一个轨迹特征之间的相似度值,可以构成m
×
n的相似度代价矩阵。
55.可选地,可计算每一个检测特征与每一个轨迹特征之间的余弦相似度,获得每一个检测特征与每一个轨迹特征之间的余弦相似度值,并根据每一个检测特征与每一个轨迹特征之间的余弦相似度值,获得每一个检测特征与每一个轨迹特征之间的相似度代价值,据以构成相似度代价矩阵中的每一个矩阵元素。
56.于本实施例中,每一个检测特征与每一个轨迹特征之间的相似度代价值可表示为:
57.其中,表示一个检测特征与一个轨迹特征之间的余弦相似度值。
58.需说明的是,也可采用其他相似度算法,例如欧式距离算法,获得每一个检测特征与每一个轨迹特征之间的相似度值。
59.于本实施例中,第二匹配阈值为高于第一匹配阈值。
60.可选地,第一匹配阈值可介于0.2至0.45之间,较佳地,第一匹配阈值可设置为0.4。
61.可选地,第二匹配阈值可介于0.6至0.9之间,较佳地,第二匹配阈值可设置为0.65。
62.步骤s404,获取一个检测特征的第一匹配结果和第二匹配结果,并继续执行步骤s4061、步骤s4071、步骤s4081中的一个。
63.步骤s4061,若根据检测特征的第一匹配结果与第二匹配结果,获得与检测特征相匹配的同一个轨迹特征,则将所获得的轨迹特征的轨迹码确定为检测特征的轨迹码。
64.具体地,若第一次匈牙利匹配结果和第二次匈牙利匹配结果获得了与检测特征相匹配的同一个轨迹特征,代表此检测特征中的未知对象已在先前的目标视频中出现过,则将所匹配到的轨迹特征的轨迹码确定为此检测特征的轨迹码。
65.例如,针对检测特征a,若检测特征a的第一匹配结果和第二匹配结果均为轨迹池中的轨迹特征a与之相匹配,则将轨迹特征a的轨迹码a,确定为检测特征a的轨迹码。
66.于本实施例中,同一目标对象在不同目标区域所获取的不同检测特征,可能与同一个轨迹特征相匹配,例如,在图2所示示例中,目标对象b在目标区域a所获取的检测特征b和在目标区域b所获取的检测特征c均与轨迹特征b相匹配,此可能是由于目标对象b在目标区域a和目标区域b出现时的着装特征或拍摄角度等因素差异较小所导致的。
67.于本实施例中,同一目标对象在不同区域所获取的不同检测特征,也可能与不同的轨迹特征相匹配,例如,在图2所示示例中,目标对象c在目标区域c所获取的检测特征e与轨迹特征d相匹配,而在目标区域d所获取的检测特征f则与轨迹特征c相匹配,此可能是由于目标对象c在目标区域c和目标区域d出现时的着装特征或拍摄角度等因素差异较大所造成。
68.步骤s4062,针对检测特征和轨迹特征执行特征融合,并基于特征融合结果更新轨迹特征。
69.于本实施例中,当在轨迹池中找到与检测特征相匹配的轨迹特征时,可通过将检测特征与轨迹特征进行融合,以更新轨迹池中的轨迹特征,使得更新后的轨迹特征能够更准确地识别出检测特征中的未知对象。
70.例如,当目标视频中的目标对象出现大幅度动作,例如转身动作时,则可能会依次获取到目标对象的正身检测特征、侧身检测特征和背身检测特征,在此情况下,若使用同一个轨迹特征,将仅能识别出正身检测特征中的目标对象,而无法识别出背身检测特征中的目标对象。基于此,本实施例通过动态地将匹配到的轨迹特征与检测特征进行融合更新,可有利于针对大幅度动作的目标对象的不同检测特征进行连续的识别,借以提升目标对象的
追踪识别效果。
71.步骤s4071,若根据检测特征的第一匹配结果与第二匹配结果,均未获得与检测特征相匹配的轨迹特征,根据检测特征生成一个新的轨迹特征和新的轨迹特征的轨迹码。
72.于本实施例中,若检测特征的第一匹配结果与第二匹配结果,均未从轨迹池中找到与检测特征相匹配的轨迹特征,代表此对象为新出现的对象,则可将此检测特征添加至轨迹池中,以生成新的轨迹特征,并针对新生成的轨迹特征赋予一个相应的轨迹码。
73.例如,在图2所示示例中,若在轨迹池中未能找到与检测特征d相匹配的轨迹特征,则将检测特征d添加至轨迹池中,以在轨迹池生成轨迹特征d以及轨迹码d。
74.步骤s4072,将新的轨迹特征的轨迹码,确定为检测特征的轨迹码。
75.步骤s4081,若第一匹配结果未获得与检测特征匹配的轨迹特征,且第二匹配结果获得与检测特征匹配的轨迹特征,则丢弃检测特征。
76.综上所述,在现有技术中,通过采用单阈值法进行识别,容易造成同一个行人被分配多个标签的问题。有鉴于此,本实施例采用双阈值方法,针对每一个检测特征和每一个轨迹特征分别执行两次匹配,可以有效地过滤模棱两可的检测特征,使得轨迹跟断、跟串的可能性大大降低。
77.再者,通过针对相匹配的检测特征和轨迹特征执行特征融合,以更新轨迹特征,可针对执行大幅度动作的目标对象进行连续地识别,借以提高目标对象的轨迹追踪效果。
78.图5示出了本技术另一实施例的轨迹追踪方法的处理流程图。本实施例为上述步骤s102的具体实施方案。如图
79.步骤s502,将每一个目标对象的底库特征与每一个轨迹特征进行匹配,确定与每一个轨迹特征匹配的底库特征。
80.可选地,可基于第三匹配阈值、高于第三匹配阈值的第四匹配阈值,将每一个轨迹特征与每一个底库特征分别执行两次匈牙利匹配,获得每一个轨迹特征的第三匹配结果和第四匹配结果。
81.于本实施例中,针对每一个轨迹特征,若根据轨迹特征的第三匹配结果与第四匹配结果,获得了与轨迹特征相匹配的同一个底库特征,将所获得的底库特征的与轨迹特征进行匹配。
82.于本实施例中,针对每一个轨迹特征,若根据轨迹特征的第三匹配结果与第四匹配结果,从底库中获得了与轨迹特征相匹配的同一个底库特征,则将此底库特征的与轨迹特征进行匹配。
83.可选地,第三匹配阈值可介于0.2至0.45之间,较佳地,第三匹配阈值可设置为0.4。
84.可选地,第四匹配阈值可介于0.6至0.9之间,较佳地,第四匹配阈值可设置为0.65。
85.于本实施例中,针对每一个目标对象的底库特征与每一个轨迹特征所执行的两次匈牙利匹配,与上述图4所示的针对每一个未知对象的检测特征与每一个轨迹特征执行两次匈牙利匹配基本相同,故在此不予赘述。
86.需说明的是,于本实施例中,若针对一个视频帧,同时新生成了多个轨迹特征,则需要针对新生成的每一个轨迹特征和每一个底库特征建立一个代价矩阵,并采用预设算法
(例如贪心算法),针对每一个新生成的轨迹特征进行匹配,先匹配相似度最高的两个特征,再匹配相似度第二高的两个特征,以此类推,直到剩余特征相似度低于预设阈值。其中,每匹配一次,底库中被成功匹配上的底库特征(底库码)将不再参与后续的匹配操作,以避免同一目标视频的同一视频帧中出现的多个行人被相同的底库特征匹配上,保证了底库数据的准确性。
87.步骤s504,针对每一个轨迹特征,将与轨迹特征匹配的底库特征的底库码与轨迹特征的轨迹码进行关联。
88.于本实施例中,可将从底库中找到的与轨迹特征相匹配的底库特征的底库码与该轨迹特征的轨迹码对应关联。
89.于本实施例中,针对每一个轨迹特征,若根据轨迹特征的第三匹配结果与第四匹配结果,均未获得与轨迹特征相匹配的底库特征,则根据轨迹特征在底库中生成一个新的底库特征以及新的底库特征的底库码,并将新生成的底库特征的底库码与轨迹特征的轨迹码对应关联。
90.例如,在图2所示示例中,若在底库中未能找到与轨迹特征e相匹配的底库特征,则将轨迹特征e添加至底库中,以生成底库特征c及其对应的底库码c。
91.步骤s506,根据与同一底库特征的底库码关联的至少一个轨迹码,构建底库码对应的目标对象的身份关联信息。
92.例如,在图2所示示例中,可整合与底库码a关联的轨迹吗a和轨迹码d,以构成底库码a对应的目标对象a的身份关联信息。
93.综上所述,本技术利用匈牙利算法针对轨迹特征与底库特征执行匹配,可以提高特征匹配结果的准确性。
94.图6示出了本技术另一实施例的轨迹追踪方法的处理流程。本实施例为上述步骤s106的一个具体实施方案。如图所示,本实施例主要包括以下步骤:
95.步骤s602,根据待查询对象的底库码、待查询对象的身份关联信息,获得待查询对象的所有轨迹码。
96.例如,当待查询对象为目标对象a时,可通过输入目标对象a的底库码a,并根据底库码a和目标对象a的身份关联信息,获取目标对象a的所有轨迹码,即轨迹码a和轨迹码d。
97.步骤s604,根据待查询对象的所有轨迹码,获得每一个轨迹码对应的所有检测特征。
98.例如,可根据目标对象a的所有轨迹码,即轨迹码a和轨迹码d,获得每一个轨迹码对应的所有检测特征,即检测特征a、检测特征d。
99.步骤s606,根据每一个轨迹码对应的所有检测特征,生成待查询对象的轨迹追踪结果。
100.例如,可根据检测特征a、检测特征d,生成目标对象a的轨迹追踪结果。其中,根据轨迹追踪结果中的检测特征a和检测特征d可获知,目标对象a曾经在目标区域a和目标区域c出现过。
101.图7示出了本技术另一实施例的轨迹追踪方法的处理流程。本实施例为上述步骤s106的另一个具体实施方案。如图所示,本实施例主要包括以下步骤:
102.步骤s702,根据待查询对象的任意一个轨迹码、每一个目标对象的身份关联信息,
获得与轨迹码关联的底库码。
103.例如,可通过输入一个轨迹码b,并根据输入的轨迹码b和每一个目标对象的身份关联信息,查询到与轨迹码b关联的底库码b,且根据底库码b,可以确定待查询对象为目标对象b。
104.步骤s704,根据待查询对象的底库码、待查询对象的身份关联信息,获得待查询对象的所有轨迹码。
105.例如,可根据查询到的底库码b,底库码b对应的目标对象b的身份关联信息,可以获得目标对象b的所有轨迹码,即轨迹码b和轨迹码c。
106.步骤s706,根据待查询对象的所有轨迹码,获得每一个轨迹码对应的所有检测特征。
107.例如,可根据目标对象b的所有轨迹码,即轨迹码b和轨迹码c,获得每一个轨迹码对应的所有检测特征,即轨迹码b对应的检测特征b、检测特征c和轨迹码c对应的检测特征f。
108.步骤s708,根据每一个轨迹码对应的所有检测特征,生成待查询对象的轨迹追踪结果。
109.例如,可根据检测特征b、检测特征c和检测特征f,生成目标对象b的轨迹追踪结果。其中,根据轨迹追踪结果中的检测特征b检测特征c和检测特征f可获知,目标对象b曾经在目标区域a、目标区域b和目标区域d出现过。
110.综上所述,本技术可根据构建的每一个目标对象的身份关联信息,通过直接输入待查询对象的底库码,直接查询待查询对象在所有目标视频中的轨迹码,据以获得待查询对象的完整的轨迹追踪结果。或者,也可通过输入待查询对象的任意一个轨迹码,以查询待查询对象的底库码,进而关联待查询对象在其他目标视频中出现的轨迹码,据以获得待查询对象的完整的轨迹追踪结果。借此,本技术不但可提高目标对象的轨迹追踪查询的灵活性,亦可获取待查询对象相关联的所有目标视频的轨迹追踪结果,以提高轨迹追踪结果的准确性和完整度。
111.图8示出了本技术示例性实施例的轨迹追踪装置的结构框图。如图所示,本实施例的轨迹追踪装置800主要包括:关联模块802、识别模块804、追踪模块806。
112.关联模块802用于将每一个目标对象的底库特征与至少一个轨迹特征进行关联,以构建每一个目标对象的身份关联信息。
113.识别模块804用于根据每一个目标对象的至少一个轨迹特征,识别从不同目标视频中获取的每一个检测特征,确定每一个检测特征对应的目标对象。
114.追踪模块806用于根据每一个目标对象的身份关联信息、每一个检测特征对应的目标对象,利用待查询对象的轨迹特征与底库特征中的任意一个,获取所述待查询对象的所有检测特征,据以生成所述待查询对象的轨迹追踪结果。
115.可选地,识别模块804还用于:将一个目标视频确定为当前视频;根据预设帧间隔,依次获取所述当前视频中的一个视频帧,以作为当前视频帧;检测所述当前视频帧中的每一个未知对象,获取每一个未知对象的检测特征;将每一个未知对象的检测特征和每一个轨迹特征进行匹配,以确定每一个检测特征的轨迹码。
116.可选地,可利用设置在各目标区域的各监控设备,获得各目标区域对应的各目标
视频。
117.可选地,识别模块804还用于:基于第一匹配阈值、第二匹配阈值,针对每一个未知对象的检测特征与每一个轨迹特征,分别执行两次匹配,获得每一个检测特征的第一匹配结果和第二匹配结果;针对每一个检测特征,若根据所述检测特征的第一匹配结果与第二匹配结果,获得与所述检测特征相匹配的同一个轨迹特征,将所述轨迹特征的轨迹码确定为所述检测特征的轨迹码。
118.可选地,识别模块804还用于:针对所述检测特征和所述轨迹特征执行特征融合,并基于特征融合结果更新所述轨迹特征。
119.可选地,识别模块804还用于:若根据所述检测特征的第一匹配结果与第二匹配结果,均未获得与所述检测特征相匹配的轨迹特征,根据所述检测特征生成一个新的轨迹特征和所述新的轨迹特征的轨迹码;将所述新的轨迹特征的轨迹码,确定为所述检测特征的轨迹码。
120.可选地,识别模块804还用于:若所述第一匹配结果未获得与所述检测特征匹配的轨迹特征,且所述第二匹配结果获得与所述检测特征匹配的轨迹特征,则丢弃所述检测特征。
121.可选地,所述两次匹配分别为匈牙利匹配,所述第二匹配阈值高于所述第一匹配阈值。
122.可选地,识别模块804还用于:计算每一个检测特征与每一个轨迹特征之间的相似度,获得每一个检测特征与每一个轨迹特征之间的相似度值;根据每一个检测特征与每一个轨迹特征之间的相似度值,获得相似度代价矩阵;根据所述相似度代价矩阵、第一匹配阈值,执行第一次匈牙利匹配,获得第一匹配结果;根据所述相似度代价矩阵、第二匹配阈值,执行第二次匈牙利匹配,获得第二匹配结果。
123.可选地,关联模块802还用于:将每一个目标对象的底库特征与每一个轨迹特征进行匹配,确定与每一个轨迹特征匹配的底库特征;针对每一个轨迹特征,将与所述轨迹特征匹配的底库特征的底库码与所述轨迹特征的轨迹码进行关联;根据与同一底库特征的底库码关联的至少一个轨迹码,构建所述底库码对应的目标对象的身份关联信息。
124.可选地,关联模块802还用于:基于第三匹配阈值、高于所述第三匹配阈值的第四匹配阈值,将每一个轨迹特征与每一个底库特征分别执行两次匈牙利匹配,获得每一个轨迹特征的第三匹配结果和第四匹配结果;针对每一个轨迹特征,若根据所述轨迹特征的第三匹配结果与所述第四匹配结果,获得与所述轨迹特征相匹配的同一底库特征,将所述底库特征与所述轨迹特征进行匹配。
125.可选地,关联模块802还用于:针对每一个轨迹特征,若根据所述轨迹特征的第三匹配结果与所述第四匹配结果,均未获得与所述轨迹特征相匹配的底库特征,根据所述轨迹特征生成一个新的底库特征和所述新的底库特征的底库码,且将所述新的底库特征的底库码与所述轨迹特征的轨迹码对应关联。
126.可选地,所述第一匹配阈值或所述第三匹配阈值可介于0.2至0.45之间,较佳地,所述第一匹配阈值或所述第三匹配阈值为0.4;所述第二匹配阈值或所述第四匹配阈值可介于0.6至0.9之间,较佳地,所述第二匹配阈值或所述第四匹配阈值为0.65。
127.可选地,追踪模块806还用于:根据待查询对象的底库码、所述待查询对象的身份
关联信息,获得所述待查询对象的所有轨迹码;根据所述待查询对象的所有轨迹码,获得每一个轨迹码对应的所有检测特征;根据每一个轨迹码对应的所有检测特征,生成所述待查询对象的轨迹追踪结果。
128.可选地,追踪模块806还用于:根据待查询对象的任意一个轨迹码、每一个目标对象的身份关联信息,获得与所述轨迹码关联的底库码;根据所述待查询对象的底库码、所述待查询对象的身份关联信息,获得所述待查询对象的所有轨迹码;根据所述待查询对象的所有轨迹码,获得每一个轨迹码对应的所有检测特征;根据每一个轨迹码对应的所有检测特征,生成所述待查询对象的轨迹追踪结果。
129.本技术的示例性实施例还提供一种计算机存储介质,所述计算机存储介质中存储有用于执行上述各实施例所述的方法中各步骤的各指令。
130.综上所述,本技术各实施例提供的轨迹追踪方案,可支持多路监控视频的轨迹追踪,以有效提升轨迹追踪结果的准确性和完整性。
131.最后应说明的是:以上实施例仅用以说明本技术实施例的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。