1.本发明涉及餐饮设备技术领域,具体涉及一种自动烹饪系统。
2.
背景技术:
3.随着自动化技术的发展,市面上出现了越来越多的自动炒菜机,但现有的自动炒菜机 产品多数仅能实现加热烹饪及翻炒操作,还需人工在烹饪过程中加入食材、调料;同时现有 的自动炒菜机翻炒操作实现方式主要为在锅盖上设置由单电机驱动的旋转锅铲及使锅体倾斜 旋转来翻炒锅中食材两种,而无法对人手烹饪操作进行精确复现;近年来兴起的“宅经济”、
ꢀ“
宅时代”也进一步加大了市场对于更高自动化程度的家用自动烹饪设备的需求。
技术实现要素:
4.本发明针对现有自动炒菜机产品无法自动加入食材、调料及无法精确复现人手烹饪操作的问题提出一种家用自动烹饪系统设计,本自动烹饪系统包括双直轨烹饪装置、扇形食材投送装置、机械臂操作平台,扇形食材投送装置与机械臂操作平台设置于双直轨烹饪装置上方两端,烹饪锅组件沿双直轨烹饪装置的双直轨平移接收扇形食材投送装置投送的食材与调料并配合机械臂操作平台的机械臂进行烹饪操作;本自动烹饪系统可以高自动化程度实现煮或炒的烹饪操作,整体结构紧凑,驱动机构主要包括4个大扭力伺服电机和若干小舵机或步进电机,占地长宽约为100cmx50cm,适用于各种人居环境。
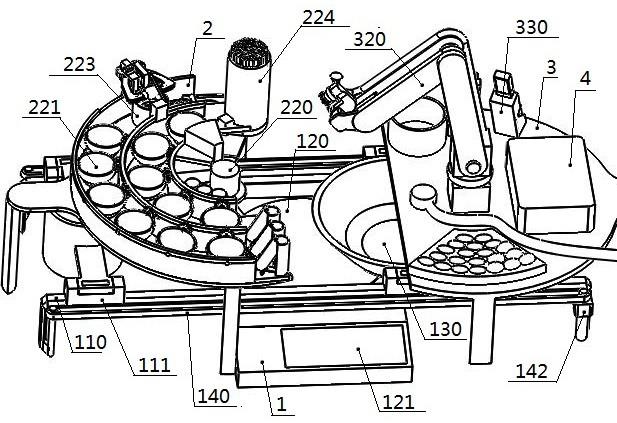
5.附图说明:图1:本发明从正面观察的立体结构示意;图2:本发明从后面观察的立体结构示意;图3:本发明的顶视示意图;图4:本发明的正视示意图;图5:扇形旋转框架(220)立体结构示意;图6:食材碗(2211)结构示意;图7:扇形旋转框架(220)中心部分示意;图8:图7中的小颗粒调料投放器(2221)结构示意;图9:挂面投放机构(224)结构示意;图10:开蛋机械爪组件(2231)结构示意;图11:蛋液搅拌碗(2232)结构示意;图12:机械臂(320)结构及其翻炒操作位姿示意;图13:从左至右依次为:3轴臂(3232)、旋转锅铲(332)、十字叉(331)结构示意;图14:旋转头(324)结构示意;
图15:机械臂(320)及旋转头(324)与食材碗(2211)配合倾倒食材操作的位姿示意。
6.图中:1-双直轨烹饪装置、2-扇形食材投送装置、3-机械臂操作平台、4-控制通讯及供电模块;1-双直轨烹饪装置:110-双直轨、111-滑块,120-电磁灶、121-触摸屏,130-烹饪锅组件、131-平底煮锅、132-平底炒锅,140-同步带平移机构、141-同步带、142-步进电机;2-扇形食材投送装置:210-旋转基台、211-伺服电机、212-圆弧滚珠滑槽、213-旋转磁铁机构、214-蛋壳收集筒,220-扇形旋转框架、2201-中心圆板、2202-电机轴固定筒、2203-半圆挡板组件、2204-径向连接条、22031-半圆形轴孔、220311-铜片、22032-磁性贴片,225-固定吸条、2251-上半圆轴孔、22511-铜片、2252-上磁性贴片,221-食材倾倒碗组件、2211-食材碗、22111-半球形碗、22112-齿轮轴、22113-光轴,222-油、调料投放组件、2221-小颗粒调料投放器、22211-漏斗形仓、22212-舵机、22213-摇臂闸门,2222-油槽、2223-液体调料槽、2224-带流量计的电控水阀,2225-调料斜推器,223-鸡蛋处理机构、2231-开蛋机械爪组件、22311-旋转臂、223111-齿轮、22312-舵机,2232-蛋液搅拌碗、22321-搅拌碗体、223211-搅拌磁铁、223212-阻拦网、22322-翻转电机,2233-敲蛋器、22331-舵机、22332-敲蛋摇臂,2234-真空吸盘组件、22341-吸盘、22342-真空泵,224-挂面投放机构、2241-面仓、2242-舵机、2243-称重闸门、22431-称重板、22432-压力传感器;3:机械臂操作平台:310-平台架、320-机械臂、330-烹饪厨具组件、311-鸡蛋存储架、312-饮用水管、3121-带流量计的电控水阀,320-机械臂、a-机械臂第1旋转轴、b-机械臂第2旋转轴、c-机械臂第3旋转轴、321-第一伺服电机、3211-1轴旋转底座、322-第二伺服电机、3221-2轴臂、323-第三伺服电机、3231-同步带、3232-3轴臂、32321-同步轮、32322-电磁铁,32323-磁性电接口、324-旋转头,3241-旋转头固定板、3242-舵机、3243-c形旋臂、32431-翻转舵机、3244-齿轮、3245-吸盘、32451-气导管,330-烹饪厨具组件、331-十字叉、3311-强磁铁、332-旋转锅铲、3321-强磁铁、3322-舵机、33221-电机磁性接口、3323-锅铲、333-超声波清洗池。
7.下面将参照图1至15的说明附图对本发明的结构和实施方法进行具体说明:1.整体说明:一种自动烹饪系统,其特征在于:包括双直轨烹饪装置(1)、扇形食材投送装置(2)、机械臂操作平台(3),还包括控制通讯及供电模块(4)。
8.2. 双直轨烹饪装置(1):所述双直轨烹饪装置(1)包括双直轨(110)、两对滑块(111)、电磁灶(120)、烹饪锅组件(130)、两组同步带平移机构(140);双直轨(110):所述双直轨(110)为水平且平行设置的一对直导轨,这对直导轨的竖直对称面将做为本说明的重要位置参考面,这对直导轨两端设置竖直支柱固定于地面,所述双直轨(110)中部下方设置有电磁灶(120),所述电磁灶(120)前部安装有触摸屏(121);烹饪锅组件(130):所述烹饪锅组件(130)包括一个双耳的平底煮锅(131)和一个双耳的平底炒锅(132),并分别通过锅体两侧把柄固定于与双直轨(110)滑动套合的一对滑块(111),形成两个组合体,可沿双直轨(110)独立水平移动,同时平底煮锅(131)和平底炒锅(132)底面均略高于电磁灶(120)加热面板;同步带平移机构(140)及其与烹饪锅组件(130)配合:所述同步带平移机构(140)包括由步进电机(142)驱动的主动同步轮、套合于定轴的从动同步轮、同步带(141),所述主动同步轮与从动同步轮同水平高度设置且轴向均为竖直向,驱动主动同步轮的步进电机(142)与套合从动同步轮的定轴分别固定于上述双直轨(110)的一根直导轨的两端支柱外侧,所述同步带(141)与主动同步轮及被动同步轮绷紧套合,其传送方向与双直轨(110)平行;双直轨(110)两侧直导轨外侧均设置有一组同步带平移机构(140),两组同步带平移机构(140)的同步带(141)分别与上述平底煮锅(131)和平底炒锅(132)与两对滑块(111)形成的两个组合体相固定,固定点为异侧不同组滑块(111),平底煮锅(131)和平底炒锅(132)能分别由两组同步带平移机构(140)带动沿双直轨(110)方向独立水平运动。
9.3. 扇形食材投送装置(2):所述扇形食材投送装置(2)主要包括旋转基台(210)和扇形旋转框架(220);旋转基台(210):所述旋转基台(210)设置于上述双直轨(110)左端上方的空间,所述旋转基台(210)主体为水平设置的、角度大于180度的扇形平板,且该扇形平板中轴线在上述双直轨(110)的竖直对称面上且该扇形平板能被该竖直对称面对称分割且其缺口朝向内,所述旋转基台(210)的前后部及左部设置竖直支柱固定于地面,同时所述旋转基台(210)底面高于上述平底煮锅(131)上口;所述旋转基台(210)还包括伺服电机(211)、圆弧滚珠滑槽(212)、旋转磁铁机构(213)、2个蛋壳收集筒(214),所述伺服电机(211)固定于旋转基台(210)中心且伺服电机(211)传动轴竖直向上并与旋转基台(210)扇形平板结构同轴心;圆弧滚珠滑槽(212):
主要参照说明附图3、7,所述圆弧滚珠滑槽(212)为与旋转基台(210)扇形平板结构同轴心、设置于旋转基台(210)内部的3条圆弧型滚珠滑槽,且这3条同轴心设置的圆弧型滚珠滑槽从内到外半径依次为:旋转基台(210)上表面扇形半径的3分之1、3分之2、最外圈半径略小于旋转基台(210)上表面扇形半径,且圆弧滚珠滑槽(212)的滚珠略高于旋转基台(210)上表面;旋转磁铁机构(213):主要参照说明附图2、3,所述旋转磁铁机构(213)包括电机、条形磁铁、置放圆筒,所述置放圆筒为封底圆筒,其设置于上述滚珠滑槽(212)的外圈两条圆弧型滑槽之间、并处于旋转基台(210)靠后方位置,所述置放圆筒固定于旋转基台(210)且其上口与旋转基台(210)上表面重合,同时在旋转基台(210)对应置放圆筒开有圆孔,所述电机固定于置放圆筒底部中心且传动轴固定有一条形磁铁,所述条形磁铁由上述电机驱动绕竖直轴旋转;蛋壳收集筒(214):主要参照说明附图2、3,所述蛋壳收集筒(214)为竖直向设置的细长圆筒,共有2个,其设置于上述旋转磁铁机构(213)左右两边且上口与旋转基台(210)下底重合并通过磁铁吸附固定于旋转基台(210),并且两个蛋壳收集筒(214)关于经过上述磁铁机构(213)内电机的竖直向旋转轴及伺服电机(211)的竖直向旋转轴的竖直面对称,同时在旋转基台(210)对应2个蛋壳收集筒(214)固定位置各开有一圆孔。
10.4.扇形旋转框架(220):主要参照说明附图3、5、7,所述扇形食材投送装置(2)扇形旋转框架(220)主体为由中心圆板(2201)、电机轴固定筒(2202)、3块同轴心的半圆挡板组成的半圆挡板组件(2203)及径向连接条(2204)组成的半圆体结构;所述中心圆板(2201)为半圆板或圆板,其半径略小于上述旋转基台(210)上表面扇形形状半径的3分之1,中心圆板(2201)圆心开有圆孔并同轴心固定有电机轴固定筒(2202);所述电机轴固定筒(2202)为封顶的竖直轴圆筒并处于扇形旋转框架(220)的中心位置,电机轴固定筒(2202)顶部中心具有锁定机构并与上述旋转基台(210)中心的伺服电机(211)竖直向上的传动轴相固定,工作时伺服电器(211)套于电机轴固定筒(2202)内部带动整个扇形旋转框架(220)水平转动;所述由3块同轴心的半圆挡板组成的半圆挡板组件(2203)中最内圈的一块半圆挡板的内弧面与上述中心圆板(2201)外圆弧面重合固定且其底面也与中心圆板(2201)底面重合,同时此最内圈的半圆挡板内弧面与外弧面所夹的等距圆弧面的半径恰为上述旋转基台(210)上表面扇形形状半径的3分之1、即伺服电器(211)带动扇形旋转框架(220)水平转动时该最内圈的半圆挡板底部的环扇面能与所述旋转基台(210)的圆弧滚珠滑槽(212)最内圈圆弧滑槽对齐滑动,同理圆挡板组件(2203)的第二圈及最外圈的半圆挡板均与最内圈的半圆挡板同轴、同向、同高度设置并且二者的环扇形底面分别与旋转基台(210)的圆弧滚珠滑槽(212)的第二圈和最外圈的圆弧滑槽相对齐,半圆挡板组件(2203)的三圈半圆挡板间由位于半圆挡板组件(2203)底部略上方水平面的若干径向方向的径向连接条(2204)连接。
11.5. 扇形旋转框架(220)之上所设置组件、机构:所述扇形旋转框架(220)之上设置有食材倾倒碗组件(221)、固定吸条(225);食材倾倒碗组件(221):主要参照说明附图3、6,所述食材倾倒碗组件(221)包括若干食材碗(2211)(本实例中为11个);所述食材碗(2211)主体为具有平底的半球形碗(22111),还包括一个齿轮轴(22112)和一个光轴(22113),所述齿轮轴(22112)为一光轴在其一端同轴套合固定一齿轮形成的组合体,所述齿轮轴(22112)的齿轮端轴向与半球形碗(22111)碗口圆形面的一径向重合固定于半球形碗(22111)外侧,所述光轴(22113)与齿轮轴(22112)同轴固定于半球形碗(22111)外侧另一端;所述食材倾倒碗组件(221)的所有食材碗(2211)环绕上述扇形旋转框架(220)的轴心设置于所述半圆挡板组件(2203)的3块半圆挡板隔出的内外两个环扇体空间中,且各个食材碗(2211)的齿轮轴(22112)轴向(即其翻转倾倒轴向)均与半圆挡板组件(2203)的上平面重合并指向扇形旋转框架(220)的轴心线,同时各个食材碗(2211)的齿轮轴(22112)端均在内侧,并且内外两圈设置的食材碗(2211)的半球形碗(22111)的球心到扇形旋转框架(220)的轴心距离分别一致;上述半圆挡板组件(2203)的3块半圆挡板对应食材倾倒碗组件(211)的各食材碗(2211)的齿轮轴(22112)与光轴(22113)于顶端开有半圆形轴孔(22031),同时该半圆形轴孔(22031)边缘贴合固定有铜片(220311),各食材碗(2211)的齿轮轴(22112)与光轴(22113)外端套合于轴孔(22031)中与之转动配合,同时半圆挡板组件(2203)各半圆形轴孔(22031)间固定有磁性贴片(22032);所述固定吸条(225)为与上述半圆挡板组件(2203)的3块半圆挡板具有相同横截面的3个同轴心半圆弧形条,并对应半圆挡板组件(2203)的各半圆形轴孔(22031)开有上半圆轴孔(2251),所述上半圆轴孔(2251)边缘贴合固定有铜片(22511),同时对应半圆挡板组件(2203)的各磁性贴片(22032)设置有上磁性贴片(2252),半圆挡板组件(2203)各位置的磁性贴片(22032)与所述上磁性贴片(2252)相吸固定。
12.6. 扇形旋转框架(220)之上所设置的其他组件、机构:所述扇形旋转框架(220)之上还设置有油、调料投放组件(222)、鸡蛋处理机构(223)、挂面投放机构(224);所述油、调料投放组件(222)包括若干小颗粒调料投放器(2221)、油槽(2222)、若干液体调料槽(2223)、若干调料斜推器(2225);小颗粒调料投放器(2221):主要参照说明附图7、8,所述小颗粒调料投放器(2221)用于投放盐、辣椒面等小颗粒调料,其包括漏斗形仓(22211)、舵机(22212)、摇臂闸门(22213),所述漏斗形仓(22211)为锥形漏斗,其设置于中心圆板(2201)上方并在中心圆板(2201)对应开有下料孔,由传动轴竖直向设置的舵机(22212)驱动与之传动轴固定的摇臂闸门(22213)旋转来封闭或开放漏斗形仓(22211)下料口;油槽(2222)与液体调料槽(2223):所述油槽(2222)与液体调料槽(2223)主体均为设置于中心圆板(2201)之上并与
电机轴固定筒(2202)外圆弧面重合的环扇体容器,所述各环扇体容器下方安装有带流量计的电控水阀(2224),并在中心圆板(2201)对应开有下料孔;调料斜推器(2225):主要参照说明附图所述调料斜推器(2225)用于输送如炸酱、辣酱等的酱料,其在扇形旋转框架(220)外侧的一径向连接条(2204)旁沿径向并列设置,或当中心圆板(2201)采取全圆平板有足够空间时也可设置于中心圆板上。其主体为斜置的料筒,料筒中套合有一磁性推料滑块,并在所述料筒上口设置竖直的下料通道,所述斜置的料筒旁固定有轴向与之平行的步进电机和直轨,并且所述步进电机传动轴上同轴固定有一丝杆,另有一具轴向平行的螺母孔和滚珠轴孔的磁性滑块同时套合于所述丝杆和直杆,同时该磁性滑块与上述料筒中套合的磁性推料滑块相吸配合,于是便能由所述步进电机驱动丝杆旋转同时带动磁性滑块连同与其相吸配合的磁性推料滑块上滑将料筒中的酱料定量推出从下料通道中倾倒。
13.7. 挂面投放机构(224):主要参照说明附图9,所述挂面投放机构(224)设置于扇形旋转框架(220)外侧的一径向连接条(2204)旁,其包括面仓(2241)、传动轴竖直向下设置的舵机(2242)、称重闸门(2243);所述面仓(2241)为竖直固定的圆形直筒,其固定于扇形旋转框架(220)外侧的径向连接条(2204),所述称重闸门(2243)设置于面仓(2241)下口位置,所述重闸门(2243)包括称重板(22431)及下方的压力传感器(22432),所述称重板(22431)为水平设置的圆形平板且其上表面能完全覆盖所述面仓(2241)下口,同时称重板(22431)完全由下方的压力传感器(22432)受力测量面支撑;所述称重闸门(2243)的力传感器(22432)固定于上述传动轴竖直向下设置的舵机(2242)的传动轴,由舵机(2242)驱动力传感器(22432)连同称重板(22431)在面仓(2241)下口水平旋转滑移来封闭或缓慢打开面仓(2241)下口投放一定量的挂面,挂面投放的质量由投放前面仓(2241)下口时的称重读数减去投放过程中的称重读数,达到要求投放量即立刻封闭面仓(2241)下口。
14.8. 鸡蛋处理机构(223):主要参照说明附图1、3、5、10、11,所述鸡蛋处理机构(223)设置位置为当上述扇形旋转框架(220)旋转至与旋转基台(210)同向对齐的位置时,对齐旋转基台(210)的旋转磁铁机构(213)位置设置于扇形旋转框架(220)的半圆挡板组件(2203)的两外圈半圆挡板上,其包括开蛋机械爪组件(2231)、蛋液搅拌碗(2232)、敲蛋器(2233)、真空吸盘组件(2234);所述开蛋机械爪组件(2231)设置于所述扇形旋转框架(220)的半圆挡板组件(2203)最外圈半圆挡板顶部,其包括一对关于竖直面对称的、水平设置的“l”型的旋转臂(22311)且旋转端在外、夹取端朝内,该对旋转臂(22311)在旋转端分别设置有一同规格的齿轮(223111)并分别套合于固定在半圆挡板组件(2203)最外圈半圆挡板的一组定轴与其转动配合,其中一旋转臂(22311)的旋转端齿轮(223111)同轴固定于一传动轴竖直向下设置的一固定舵机(22312)的传动轴,同时所述一对旋转臂(22311)旋转端的齿轮(223111)相互啮合配合,舵机(22312)驱动所述两旋转臂(22311)做关于一经过扇形旋转框架(220)中轴线的竖直面对称的旋转运动,即为开蛋机械爪组件(2231)开合过程;
所述真空吸盘组件(2234)包括一对吸盘(22341)、两个真空泵(22342)及导气管,所述一对吸盘(22341)对称固定设置于上述两旋转臂(22311)的夹取端上,两吸盘(22341)分别通过导气管连接于一真空泵(22342);所述敲蛋器(2233)包括舵机(22331)及敲蛋摇臂(22332),所述敲蛋摇臂(22332)为刀形铁片,并与上述开蛋机械爪组件(2231)的两旋转臂(22311)对称运动的竖直对称面重合,并由固定于上述扇形旋转框架(220)的半圆挡板组件(2203)的第2圈半圆挡板顶部且传动轴为水平向的舵机(22331)传动轴驱动敲蛋摇臂(22332)在竖直面内转动敲开开蛋机械爪组件(2231)与真空吸盘组件(2234)配合工作所抓取的鸡蛋;所述蛋液搅拌碗(2232)设置于开蛋机械爪组件(2231)下方、扇形旋转框架(220)的半圆挡板组件(2203)的两外圈半圆挡板之间,其包括搅拌碗体(22321)和翻转电机(22322),所述搅拌碗体(22321)为圆筒形平底碗,由聚乙烯等无磁性的食品级材料制成,其底部具有一卵形的搅拌磁铁(223211),并在搅拌磁铁(223211)上方固定一阻拦网(223212),所述翻转电机(22322)为舵机,其传动轴轴线方向为水平设置且经过上述圆筒形搅拌碗体(22321)的中轴线,翻转电机(22322)固定于扇形旋转框架(220)的半圆挡板组件(2203)的外圈或第2圈半圆挡板上,同时翻转电机(22322)传动轴与搅拌碗体(22321)外壁固定,驱动搅拌碗体(22321)翻转倾倒,搅拌碗体(22321)相对与翻转电机(22322)传动轴固定的一侧外壁与翻转电机(22322)传动轴同轴固定有直圆杆并套合于半圆挡板组件(2203)对应所开的轴孔与之转动配合以加强稳定性。
15.蛋液搅拌及倾倒操作:进行蛋液搅拌操作时,伺服电机(211)带动扇形旋转框架(220)旋转至蛋液搅拌碗(2232)与旋转磁铁机构(213)对齐,启动两真空泵(22342)使两吸盘(22341)吸紧鸡蛋两端,敲蛋摇臂(22332)在舵机(22331)驱动下下摇敲开鸡蛋中部,舵机(22312)驱动旋转臂(22311)张开扯开蛋壳,同时蛋液落入蛋液搅拌碗(2232)底部,旋转臂(22311)继续张开至对齐两蛋壳收集筒(214),关闭两真空泵(22342)使两半蛋壳分别落入两蛋壳收集筒(214)中,启动旋转磁铁机构(213)的电机使其传动轴上固定的条形磁铁旋转并带动上方蛋液搅拌碗(2232)底部的搅拌磁铁(223211)旋转搅拌鸡蛋液,后即可由伺服电机(211)带动扇形旋转框架(220)将蛋液搅拌碗(2232)旋转至双直轨(110)竖直对称面将蛋液倾倒给烹饪锅组件(130)。
16.9. 机械臂操作平台(3):所述机械臂操作平台(3)包括平台架(310)、机械臂(320)、旋转头(324)、烹饪厨具组件(330)、鸡蛋存储架(311)、饮用水管(312);所述平台架(310):所述平台架(310)设置于上述双直轨(110)右端上方的空间,所述平台架(310)主体为水平设置的、角度大于180度弓形平板结构,且该弓形平板中轴线在上述双直轨(110)的竖直对称面上同时该弓形平板能被双直轨(110)的竖直对称面对称分割,所述平台架(310)的前后部及右部设置竖直支柱固定于地面,并且所述平台架(310)底面高于上述平底炒锅(132)上口;机械臂(320):
主要参照说明附图1、3、4、12,所述机械臂(320)包括第一伺服电机(321)、1轴旋转底座(3211)、第二伺服电机(322)、2轴臂(3221)、第三伺服电机(323)、3轴臂(3232);所述第一伺服电机(321)传动轴竖直向上固定于上述平台架(310)上表面中心,且第一伺服电机(321)传动轴轴心线(即机械臂第1旋转轴(a))与上述平台架(310)弓形平板结构中轴线重合;所述1轴旋转底座(3211)为圆形平板机构,其固定于上述第一伺服电机(321)传动轴并与第一伺服电机(321)传动轴轴心线同轴,由第一伺服电机(321)驱动旋转底座(3211)绕机械臂第1旋转轴(a)旋转,所述第二伺服电机(322)传动轴沿水平向固定于上述1轴旋转底座(3211)中心位置,第二伺服电机(322)相对其传动轴位置的一侧固定有一与其传动轴同轴的轴承;所述2轴臂(3221)主体为平行、同向并列的两个相对位置固定的长直板构成的组合体,其中一直板根端与上述第二伺服电机(322)的传动轴相固定,两直板内平面所夹空间包围第二伺服电机(322)主体,另一直板对应上述第二伺服电机(322)传动轴相对侧固定的轴承固定设置有定轴并套合于上述轴承中,(于是)2轴臂(3221)由第二伺服电机(322)驱动绕机械臂第2旋转轴(b)旋转,此外,构成2轴臂(3221)主体的两个长直板头端分别设置有一个同轴的、且轴向与第二伺服电机(322)传动轴平行的轴承(该对轴承轴向即为机械臂第3旋转轴(c));所述第三伺服电机(323)传动轴沿平行于第二伺服电机(322)传动轴的方向固定于上述2轴臂(3221)一侧的长直板靠近根端的位置中部,且其传动轴位于上述2轴臂(3221)两直板内平面所夹空间中,所述第三伺服电机(323)传动轴同轴向固定有一同步带轮;所述3轴臂(3232)主体为平行、同向并列的两个相对位置固定的长直板构成的组合体,3轴臂(3232)主体位于2轴臂(3221)两直板内平面所夹空间中,所述构成3轴臂(3232)的两平行、同向并列的长直板根端中部由一平行于第二伺服电机(322)传动轴的光轴两两固定连接,且该光轴向3轴臂(3232)两外侧有延伸并分别套合于上述固定于构成2轴臂(3221)主体的两个长直板头端的一对轴承与之转动配合,此外,所述连接固定构成3轴臂(3232)的两长直板根端的光轴同轴固定有一同步轮(32321),且该同步轮(32321)与上述固定于第三伺服电机(323)传动轴的同步轮对齐,并由一同步带(3231)紧绷套合连接这两个同步轮,第三伺服电机(323)通过该同步带传动机构驱动3轴臂(3232)绕机械臂第3旋转轴(c)旋转。
17.10. 机械臂操作平台(3)其他机构、组件:机械臂(320)的3轴臂(3232)的其他机构、组件:3轴臂(3232)头端设置的电磁铁(32322):主要参照说明附图13,所述机械臂(320)的3轴臂(3232)头端设置有电磁铁(32322),电磁铁旁具磁性电接口(32323),该磁性电接口(32323)具3个磁性接头分别连接于控制通讯及供电模块(4)中舵机控制模块的零线火线及一个舵机信号口;旋转头(324):主要参照说明附图14,机械臂(320)的3轴臂(3232)的头端还设置有旋转头(324),所述旋转头(324)主要包括旋转头固定板(3241)、舵机(3242)、c形旋臂(3243),所述旋转头固定板(3241)为一对平行设置的平板,其固定于机械臂(320)的3轴臂(3232)头端,旋转头
固定板(3241)一侧平板内侧固定有传动轴向与上述机械臂(320)的机械臂第3旋转轴(c)平行的舵机(3242),c形旋臂(3243)主体为“c”字形的平板,其“c”字形结构一端与上述固定于旋转头固定板(3241)的舵机(3242)的传动轴固定,由舵机(3242)驱动在竖直面上旋转,所述c形旋臂(3243)“c”子形结构另一端设置有一传动轴向与舵机(3242)传动轴轴向垂直的翻转舵机(32431),所述翻转舵机(32431)传动轴同轴固定有一齿轮(3244),所述c形旋臂(3243)在远离舵机(3242)的位置还固定设置有吸盘(3245)该吸盘(3245)通过气导管(32451)连接于平台架(310)上的一个真空泵;烹饪厨具组件(330):烹饪厨具组件(330)设置于平台架(310)上后侧位置,其包括十字叉(331)及其置放架旋转锅铲(332)及其置放架、超声波清洗池(333),所述十字叉(331)及旋转锅铲(332)的置放架均固定于固定架(330),二者置放面均倾斜向上指向机械臂(320)的机械臂第1旋转轴(a);,所述十字叉(331)头端具沿一在正方形四角设置的、互相平行的、4根相同的直圆竹棍或铁棍,其把柄端具强磁铁(3311)能与3轴臂(3232)头端设置的电磁铁(32322)对齐相吸配合;所述旋转锅铲(332)把柄端具强磁铁(3321)及电机磁性接口(33221),能分别与3轴臂(3232)头端设置的电磁铁(32322)及磁性电接口(32323)对齐相吸配合,所述电机磁性接口(33221)电连接于旋转锅铲(332)中部的舵机(3322),该舵机(3322)的传动轴固定连接有一锅铲(3323);超声波清洗池(333):所述超声波清洗池(333)设置于平台架(310)上、十字叉(331)及旋转锅铲(332)的置放架旁,池中盛清水,池底设置有超声波清洗器,用于清洗十字叉(331)及旋转锅铲(332);鸡蛋存储架(311):所述鸡蛋存储架(311)设置于平台架(310)上前侧,上设置若干半椭球槽存放横置的鸡蛋,各半椭球槽上表面椭圆边缘的短轴延长线均经过上述机械臂(320)的机械臂第1旋转轴(a);饮用水管(312):所述饮用水管(312)一端连接于家庭饮用水龙头,另一端连接于设置在平台架(310)上、机械臂(320)的第一伺服电机(321)左侧的带流量计的电控水阀(3121);控制通讯及供电模块(4)设置位置:所述控制通讯及供电模块(4)设置于平台架(310)上右侧位置(即机械臂(320)工作时运动范围外)。
18.机械臂(320)与旋转锅铲(332)或十字叉(331)吸附固定操作:机械臂(320)头端运动至旋转锅铲(332)置放架上方再下摇使机械臂(320)的电磁铁(32322)及磁性电接口(32323)与旋转锅铲(332)的强磁铁(3321)及电机磁性接口(33221)分别对齐,启动机械臂(320)的电磁铁(32322)与旋转锅铲(332)的强磁铁(3321)相吸固定,十字叉(331)亦通过相
同方式与机械臂(320)固定。
19.旋转锅铲(332)与十字叉(331)应用场景及方法:旋转锅铲(332)的舵机(3322)在炒菜过程中不断旋转使锅铲(3323)能对所炒食材进行不同方向的翻炒或切割;十字叉(331)适用于炒面、米线时的前后及左右方向的翻炒,或在煮汤煮面时进行搅拌。
20.机械臂(320)抓取鸡蛋操作:机械臂(320)的头端运动至鸡蛋存储架(311)上方,同时旋转头(324)缓慢下摇使吸盘(3245)缓慢贴附于鸡蛋存储架(311)存储的鸡蛋,启动吸盘(3245)连接的真空泵吸附固定住该鸡蛋,同时伺服电机(211)带动扇形旋转框架(220)旋转至开蛋机械爪组件(2231)到达双直轨(110)竖直对称面位置,机械臂(320)便能将鸡蛋交接给开蛋机械爪组件(2231);或将鸡蛋置于平底煮锅(131)中做水煮鸡蛋。
21.机械臂(320)与食材倾倒碗组件(221)配合倾倒食材操作:烹饪过程中,当需要将食材倾倒碗组件(221)的一食材碗(2211)所盛食材倾倒入烹饪锅时,伺服电机(211)带动扇形旋转框架(220)旋转至目标食材碗(2211)到达双直轨(110)竖直对称面位置,然后机械臂(320)头端运动至双直轨(110)竖直对称面位置,同时旋转头(324)缓慢下摇至齿轮(3244)轴向水平,机械臂(320)头端继续运动至其头端齿轮(3244)与目标食材碗(2211)的齿轮轴(22112)的齿轮对齐啮合(参照说明附图(15)),启动翻转舵机(32431)驱动目标食材碗(2211)翻转180度倾倒其中的食材至下方烹饪锅中。
22.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
