1.本发明涉及一种标定器,具体涉及一种用于三维口腔扫描仪的标定器。
背景技术:
2.三维口腔扫描仪在出厂时都需要对进行标定,获取扫描仪的测量系统的内参数和外参数。标定结果会直接影响到扫描仪的精度和稳定性。然而,内、外参数会随着环境和时间变化,使得测量系统出现偏差。例如,环境中温度的变化会使得测量系统的镜头玻璃、结构组件发生变化,从而引起测量偏差;时间的变化也有影响,测量系统的材料本身、粘胶、螺钉之类的辅助器件的应力随时间会缓慢释放,从而引起测量偏差。因此,三维口腔扫描仪需要定期标定,以随时处于稳定的工作状态。
3.测量(成像)系统一般通过标定板进行标定。决定标定精度的因素主要有两个:一是标定板的精度,二是标定算法。
4.标定板的精度主要取决于标定板上的特征圆的位置的准确度,这些特征圆的相对位置的加工精度要控制在1um以内,同时标定板的平面度的精度要求也在1um以内。除此之外,标定的时候,还要让这些圆均匀地落在口腔三维扫描仪的扫描区域内,标定时所获取的扫描仪姿态信息越丰富,最终的标定结果精度越高。
5.标定算法为一维标定算法或二维标定算法。一维标定算法的对象通常为三维口腔扫描仪获取的标定板沿着z轴方向直线运动到不同位置的图像。一种二维标定算法的对象为三维口腔扫描仪获取的标定板沿着z轴方向不同位置的图像,以及标定板沿着z轴方向旋转到不同位置的图像;另一种二维标定算法可以参考cn 108269287 a,三维扫描仪的标定装置、方法、存储介质以及处理器。
6.cn 211046994 u公开了一种扫描仪自动标定装置,但是该自动标定装置难于被应用到口腔三维扫描仪领域。主要因为:在三维口腔扫描仪领域,一维或二维的精度已经足够使得口腔三维扫描仪处于合理精度的状态,没有进一步改进的动机。
技术实现要素:
7.有鉴于此,本发明实施例提供一种用于三维口腔扫描仪的标定器,该标定器能够在3个自由度上调整标定板的位姿,使得得到的扫描仪的内、外参数更加准确,从而使得扫描仪扫描的精度更高。
8.本发明采用的技术方案为:
9.本发明实施例提供一种用于三维口腔扫描仪的标定器,包括:壳体和控制器,所述壳体的上端设置有供口腔扫描仪插入的插入口,所述壳体的内部设置有标定板和标定驱动机构,所述标定驱动机构包括升降驱动部、水平旋转驱动部和倾斜旋转驱动部,所述标定板的扫描面的面积与所述口腔扫描仪的视场大小正相关;所述升降驱动部用于带动所述标定板沿空间直角坐标系的z轴上下移动,所述水平旋转驱动部用于带动所述标定板沿z轴旋转以在空间直角坐标系的y轴所在平面内水平旋转,所述倾斜旋转驱动部用于带动所述标定
板沿空间直角坐标系的x轴上下转动;所述控制器分别与所述口腔扫描仪和所述标定驱动机构通信连接,用于根据预设指令控制口腔扫描仪、升降驱动部、水平旋转驱动部和倾斜旋转驱动部执行相应的操作,使得所述口腔扫描仪扫描处于不同的位姿状态下的标定板的图像数据。
10.本发明实施例提供的用于三维口腔扫描仪的标定器由于能够使得标定板在三个自由度上运动,从而能够获得覆盖口腔扫描仪在口内扫描时与牙齿的相对位置,使得扫描的数据能够更加的符合实际的牙齿扫描数据,从而能够使得得到的扫描仪的内外参数更加准确,进而使得扫描仪扫描的精度更高。
附图说明
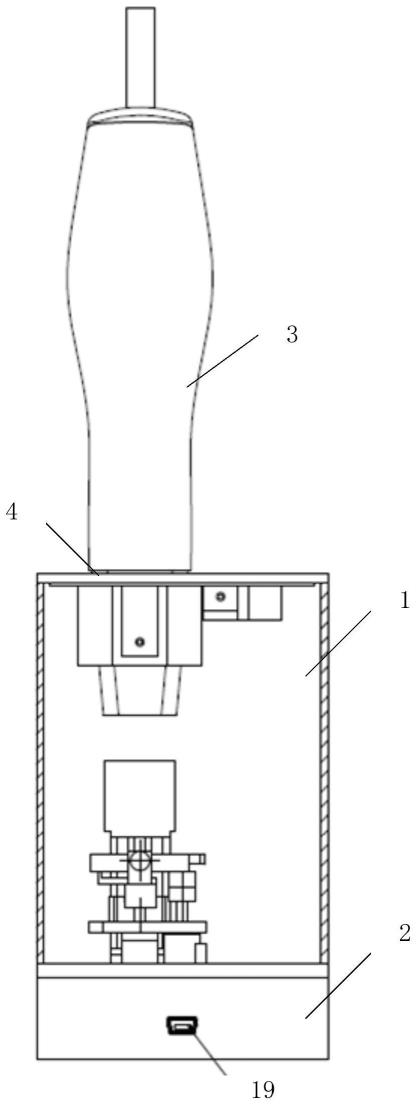
11.图1为本发明实施例提供的用于三维口腔扫描仪的标定器的结构示意图;
12.图2为本发明实施例提供的用于三维口腔扫描仪的标定器的标定驱动机构的结构示意图;
13.图3为本发明实施例提供的用于三维口腔扫描仪的标定器的第二连接件的结构示意图;
14.图4为本发明实施例使用的空间坐标系的示意图;
15.图5(a)至图5(i)分别为示出本发明实施例的标定板在实际使用时处于不同位姿状态的示意图;
16.图6为使用本发明的用于三维口腔扫描仪的标定器标定的扫描仪的扫描精度示意图;
17.图7和图8为现有标定设备标定的扫描仪的扫描精度示意图。
具体实施方式
18.为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.如图1、图2和图3所示,本发明实施例提供一种用于三维口腔扫描仪的标定器,包括:壳体1、底座2和控制器(未图示)。其中,壳体1设置在底座2上,可与底座2一体形成或者分开形成。壳体1的上端设置有供口腔扫描仪3插入的插入口4,壳体1的内部设置有标定板5和标定驱动机构,标定驱动机构包括升降驱动部6、水平旋转驱动部7和倾斜旋转驱动部8。标定驱动机构放置在底座2上。
20.在本发明实施例中,标定板5可为带有固定间距图案的阵列平板。标定板5的扫描面的面积大于口腔扫描仪3的扫描口的面积,且与口腔扫描仪3的视场大小正相关,以使得口腔扫描仪能够扫描到合理范围内的清楚的标定板5的图像数据。在一个示例中,标定板5的扫描面的尺寸可为24mm*24mm。一个实施例中,标定板5与口腔扫描仪3的之间的光路距离被设置为与口腔扫描仪3扫描口腔内的牙齿时的光路距离相同(或基本相同)。
21.在本发明实施例中,升降驱动部6用于带动标定板5沿空间直角坐标系的z轴上下移动,水平旋转驱动部7用于带动标定板5沿垂直于空间直角坐标系的y轴水平旋转,倾斜旋
转驱动部8用于带动标定板5沿空间直角坐标系的x轴上下转动。空间直角坐标系的原点为处于水平状态下的标定板5的中心o,如图4所示。
22.进一步地,如图2所示,在本发明实施例中,标定驱动机构还包括第一连接件9和第二连接件10。其中,升降驱动部6的驱动轴与第一连接件9的一端连接。水平旋转驱动部7的驱动轴穿过第一连接件9的另一端与第二连接件10连接;第二连接件10与标定板支座11活动连接;标定板支座11上设置有配重12,倾斜旋转驱动部8的驱动轴与配重12连接,通过倾斜旋转驱动部8和配重12的相互配合实现标定板5沿x轴的上下旋转。
23.在本发明实施例中,标定板支座11用于放置标定板5。第一连接件9可为板状结构。如图2和3所示,第二连接件10可包括基板13,基板13的左右两端向上延伸形成有两个立板14,基板的后端延伸形成有支撑部15,基板的前端向外突出形成有限位块16。基板13的下端与倾斜旋转驱动部8的驱动轴连接。两个立板14分别与标定板支座11的左右两端转动连接,在一个示例中,立板14可通过转动杆与标定板支座11转动连接,具体地,可在立板和标定板支座上开设连接孔,转动杆依次穿过立板和标定板支座上的连接孔,从而实现两者之间的转动连接。配重12可设置在标定板支座11的前端,但并不局限于此,也可设置在标定板支座11的后端,此时,限位块16可设置在基板13的后端,支撑部15设置在基板13的前端。在倾斜旋转驱动部8和配重12的作用下,标定板支座11可相对于立板上下转动,以选择性地与支撑部15和限位块16相接触。支撑部15可包括与基板13连接的连接板17以及沿连接板17向上延伸形成的支撑板18。支撑板18可整体形成为板状,在一个示例中,支撑板18的两端可向上突出形成有与标定板支座11相接触的两个支撑端。在本发明实施例中,限位块16的位置被设置为使得标定板支座11能够向下转动预设角度。
24.优选的实施例中,预设角度与标定板的扫描面的面积、和/或标定板与扫描仪之间的距离相关。在一个示意性实施例中,例如,预设角度可为0~30
°
。优选,预设角度可为30
°
。更优选,预设角度可为20
°
。
25.具体地,在本发明实施例中,在升降驱动部的驱动作用下,可带动与升降驱动部的驱动轴连接的第一连接件沿z轴上下移动,进而带动标定板支座整体沿z轴上下移动。在水平旋转驱动部的驱动作用下,可带动与水平旋转驱动部的驱动轴连接的第二连接件沿z轴旋转,以在y轴所在平面内水平旋转,进而带动标定板支座整体沿y轴所在平面水平旋转。在倾斜旋转驱动部带动其驱动轴向上移动时,能够顶住配重,使得标定板处于水平位置时,即标定板支座的一端抵靠在支撑板的两个支撑端上,另一端被倾斜旋转驱动部的驱动轴支撑。在倾斜旋转驱动部解除驱动力时,由于配重的原因,标定板支座会沿x轴向下转动,即设置有配重的一端向下转动,在向下转动至限位块的位置时,停止转动。
26.在本发明实施例中,升降驱动部6、水平旋转驱动部7和倾斜旋转驱动部8可为驱动电机,可通过现有的驱动连接方式与对应的连接结构连接。
27.进一步地,在本发明实施例中,控制器分别与口腔扫描仪3和标定驱动机构通信连接,用于根据预设指令控制口腔扫描仪3、升降驱动部6、水平旋转驱动部7和倾斜旋转驱动部8执行相应的操作,使得口腔扫描仪3能够扫描处于不同的位姿状态下的标定板的图像数据,不同的位姿状态覆盖口腔扫描仪在扫描口腔内的牙齿时,与牙齿的相对位置姿态。
28.口腔扫描仪3扫描的数据可实时发送给控制器,控制器对接收的数据进行处理,得到口腔扫描仪3的内、外参数。利用扫描仪扫描的图像数据对口腔扫描仪进行标定处理可采
用现有方法。
29.在本发明实施例中,控制器被配置为使得标定板在不同的时间(例如自动的运动到)位于不同的位置和/或不同的姿态(位置和姿态简称位姿)。标定板的位姿包括n个(n》=3)位姿,优选的,所述n个位姿与口腔扫描仪3的相对位置,与口腔扫描仪3扫描口腔内的牙齿的相对位置相关,从而使得扫描仪3的标定具有较高的精度。
30.进一步的,n个位姿包括一个原始位姿,n1个第二类位姿,n2个第三类位姿。原始位姿为下文实施例1所述位姿。第二类位姿为实施例1标定板的第二中心线b与x轴的夹角为α,第一中心线a与y轴的夹角为β。第三类位姿为实施例1所述的标定板的第一中心线和第二中心线分别位平行y轴和x轴,且沿着z轴上下移动的位姿。第二类位姿中,进一步的,n1个位姿中,第一中心线a与y轴的夹角分别为β1,β2,......,β
n1
,即β是非固定值。n2个位姿中,第二中心线b与x轴的夹角均为α,即α是固定值,标定板沿z轴上下移动的距离分别为h1mm和h2mm,h2大于h1,优选,h2=2*h1,在一个示例中,h1=1.5mm,h2=3mm。
31.更优选的,n1=4,n2=4,即可通过控制标定驱动机构使得标定板位于9种位姿状态下,分别称作为第一至第九位姿状态。第二类位姿为第二-第五位姿,第三类位姿为第六-九位姿。
32.(实施例1)
33.在该实施例中:
34.在第一位姿状态下,标定板的第一中心线a和第二中心线b分别位于y轴和x轴上,标定板的中心o位于原点处,第一中心线a和第二中心线b为经过标定板的中心相互垂直的两条直线,即处于水平状态。
35.在第二位姿状态下,标定板的第二中心线b与x轴的夹角为20
°
,可通过解除倾斜旋转驱动部的驱动力,使得标定板支座在配重的作用下向下转动至限位块的位置来实现。
36.在第三位姿状态下,标定板的第二中心线b与x轴的夹角为20
°
,第一中心线a与y轴的夹角为90
°
。该状态可在第二位姿状态下,通过控制水平旋转驱动部驱动标定板支座绕z轴顺时针或者逆时针旋转90
°
得到。
37.在第四位姿状态下,标定板的第二中心线b与x轴的夹角为20
°
,第一中心线a与y轴的夹角为180
°
。该状态可在第三位姿状态下,通过控制水平旋转驱动部驱动标定板支座继续绕z轴顺时针或者逆时针旋转90
°
得到。
38.在第五位姿状态下,标定板的第二中心线b与x轴的夹角为20
°
,第一中心线a与y轴的夹角为270
°
。该状态可在第四位姿状态下,通过控制水平旋转驱动部驱动标定板支座继续绕z轴顺时针或者逆时针旋转90
°
得到。
39.在第六位姿状态下,标定板的中心距离原点上方1.5mm,标定板的第一中心线a和第二中心线b分别位平行y轴和x轴。该状态可先通过控制倾斜旋转驱动部和水平旋转驱动部使得在第五位姿状态下的标定板复位到初始状态即第一位姿状态,然后通过控制升降驱动部驱动标定板支座沿z轴上升1.5mm得到。
40.在第七位姿状态下,标定板的中心距离原点上方3mm,标定板的第一中心线a和第二中心线b分别位平行y轴和x轴。该状态可在第六位姿状态下,通过控制升降驱动部驱动标定板支座继续沿z轴上升1.5mm得到。
41.在第八位姿状态下,标定板的中心距离原点下方1.5mm,标定板的第一中心线a和
第二中心线b分别位平行y轴和x轴。该状态可先通过控制升降驱动部使得在第七位姿状态下的标定板复位到初始状态即第一位姿状态,然后通过控制升降驱动部驱动标定板支座沿z轴下降1.5mm得到。
42.在第九位姿状态下,标定板的中心距离原点下方3mm,标定板的第一中心线a和第二中心线b分别位平行y轴和x轴。该状态可在第八位姿状态下,通过控制升降驱动部驱动标定板支座继续沿z轴下降1.5mm得到。
43.上述的第一至第九位姿状态下的标定板在实际使用时的状态可如图5(a)至5(i)所示。
44.(实施例2)
45.在该实施例中,9种位姿状态与前述实施例类似,不同之处在于,在第二至第五位姿状态下,标定板的第二中心线与x轴的夹角为30
°
。
46.在本发明实施例中,预设指令可包括驱动指令和扫描指令,驱动指令用于指示升降驱动部6、水平旋转驱动部7和倾斜旋转驱动部8按照预设顺序驱动,使得标定板依次处于上述九种位姿状态下,扫描指令用于指示口腔扫描仪3在标定板位于指定位姿状态时执行扫描操作。
47.此外,在本发明实施例中,在底座2上还可以设置有通信接口19,例如usb接口。通过将usb接口与控制器连接,可自动实现对不同位姿状态下的标定板的扫描操作。
48.本发明实施例提供的用于三维口腔扫描仪的标定器,能够通过标定驱动机构使得标定板在3个自由度上运动,在进行标定操作时,通过控制标定驱动机构使得标定板分别位于指定的3个自由度上的9个位姿状态下,由于这9个位姿状态能够有效的覆盖口腔扫描仪在口内扫描时与牙齿的相对位置的姿态,因此能够使得得到的扫描仪的内外参数更加准确,进而使得扫描仪扫描的精度更高。
49.在一个具体示例中,利用本发明实施例提供的用于三维口腔扫描仪的标定器得到的口腔扫描仪的扫描精度如图6所示。使用相同的口腔扫描仪分别在现有的一维标定器和二维标定器获得的扫描精度可分别如图7和图8所示。通过比较图6至图8的数据可知,利用本发明实施例提供的用于三维口腔扫描仪的标定器得到的口腔扫描仪的扫描精度为0.035736mm,而利用现有的一维标定器和二维标定器获得的扫描精度分别为0.098448mm和0.058885mm,可知,本发明实施例提供的用于三维口腔扫描仪的标定器得到的口腔扫描仪的扫描精度远大于现有标定器得到的扫描精度。
50.综上,本发明实施例提供的用于三维口腔扫描仪的标定器由于能够使得标定板在三个自由度上运动,从而能够获得覆盖腔扫描仪在口内扫描时与牙齿的相对位置的姿态,使得扫描的数据能够更加的符合实际的牙齿扫描数据,从而能够使得得到的扫描仪的内外参数更加准确,进而使得扫描仪扫描的精度更高。
51.以上所述实施例,仅为本发明的具体实施方式,用以说明本发明的技术方案,而非对其限制,本发明的保护范围并不局限于此,尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围,都应涵盖在本发明的保护范围之内。因此,
本发明的保护范围应所述以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。