1.本技术涉及无人机的领域,尤其是涉及一种无人机跟踪系统。
背景技术:
2.无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机
3.在需要对某个目标进行持续跟踪监测时,为了节约人力可以采用无人机携带监测设备进行持续跟踪监测,目前,无人机在对目标进行跟踪时,由于地形复杂或存在较多与目标相似的干扰因素,再加上无人机自身跟踪性能不够稳定,精确度不高,容易丢失目标。
技术实现要素:
4.为了便于实现无人机的精确跟踪,提高跟踪的精确度,本技术提供了一种无人机跟踪系统。
5.本技术提供的一种无人机跟踪系统采用如下的技术方案:
6.一种无人机跟踪系统,包括:包括无人机本体和目标识别标识,所述无人机本体上设置有第一gps定位模块、第一无线通讯模块、图像采集模块、图像识别模块、处理器以及飞行控制器,所述处理器连接所述飞行控制器,所述第一gps定位模块、第一无线通讯模块以及图像识别模块均与处理器连接,所述图像采集模块连接所述图像识别模块;
7.所述目标识别标识设置在待追踪目标上,所述目标识别标识包括标识本体以及设置在标识本体内的第二gps定位模块和第二无线通讯模块,所述第二gps定位模块和第二无线通讯模块连接,所述第一无线通讯模块和第二无线通讯模块通讯连接,以实现第二gps定位模块和处理器的连接;
8.所述第一gps定位模块用于对所述无人机本体进行定位,输出第一定位信号;
9.所述第二gps定位模块用于对所述标识本体进行定位输出第二定位信号;
10.所述第二无线通讯模块接收所述第二定位信号,并将所述第二定位信号通过所述第一无线通讯模块传输至所述处理器;
11.所述图像采集模块用于采集所述待追踪目标的图像信息;
12.所述图像识别模块用于接收所述图像信息,并对所述图像信息进行识别,当识别到目标识别标识时,输出第一识别信息,当未识别到目标识别标识时,输出第二识别信息;
13.所述处理器接收所述第一定位信号、第二定位信号和第一识别信息,输出第一控制信号;
14.所述飞行控制器接收所述第一控制信号,对所述待追踪目标进行跟踪。
15.通过采用上述技术方案,在无人机本体上设置有第一gps定位模块,在在标识本体内设置有第二gps定位模块,第一gps定位模块用于对无人机进行定位,输出第一定位信号,并将第一定位信号传输至处理器,第二定位模块用于对标识本体进行定位,输出第二定位信号,并将第二定位信号通过第一无线通讯模块和第二无线通讯模块传输至处理器,同时在无人机本体上还设置有图像采集模块,图像采集模块实时采集被跟踪目标的图像信息,
并将图像信息传输至图像识别模块,图像识别模块对采集到的图像信息进行识别,当识别到目标识别标识时,输出第一识别信号,处理器接收第一定位信号、第二定位信号和第一识别信号,输出第一控制信号,飞行控制器接收第一控制信号控制无人机对目标进行跟踪,采用上述方案,通过第一gps定位模块、第二gps定位模块和处理器的配合实现对无人机与目标之间距离和偏差的确定,并通过飞行控制器控制无人机进行目标跟踪,同时通过图像采集模块采集目标图像,通过图像识别模块,判断跟踪的目标是否正确,便于实现无人机的精确跟踪,提高跟踪的精确度。
16.可选的,所述标识本体内设置有超声波发生器,所述超声波发生器连接所述第二无线通讯模块,所述无人机本体上设置有超声波接收器,所述超声波接收器连接所述处理器。
17.通过采用上述技术方案,当由于地形较复杂,在进行目标跟踪时,图像采集模块暂时无法采集到目标图像时,此时处理器输出超声波控制指令,并将超声波控制指令通过第一无线通讯模块和第二无线通讯模块传输至超声波发生器,超声波发生器接收超声波控制指令发出超声波,无人机本体上的超声波接收器接收超声波,输出超声波接收信号,处理器接收超声波接收信号,输出跟踪信号,飞行控制器接收跟踪信号,进行目标跟踪。
18.可选的,还包括红外线扫描装置,所述红外线扫描装置设置在无人机本体上,所述红外线扫描装置连接所述处理器,所述红外线扫描装置用于检测到无人机前方出现障碍物时,输出障碍物检测信号,所述处理器接收所述障碍物检测信号,输出第三控制信号。
19.通过采用上述技术方案,通过设置红外线扫描装置,可以在无人机飞行过程中,实时检测前方是否遇到障碍物,当检测到障碍物时输出障碍物检测信号,处理器接收障碍物检测信号,输出第三控制信号,飞行控制器接收第二控制信号,控制无人机躲避障碍物。
20.可选的,所述无人机本体上还设置有录音器,所述录音器与所述处理器连接,所述录音器用于获取跟踪目标输入的语音,处理器根据语音生成第四控制信号。
21.通过采用上述技术方案,通过在无人机上设置录音器,被跟踪目标可通过录音器输入语音,处理器根据语音生成第四控制信号,飞行控制器接收第三控制信号,控制无人机进行相应的动作。
22.可选的,所述图像采集模块为摄像机。
23.可选的,所述处理器为arm处理器。
24.可选的,所述设备标识内设置有电源模块,所述电源模块分别连接所述第二gps定位模块、第二无线通讯模块和超声波发生器。
25.可选的,所述标识本体上设置有usb接口,所述usb接口连接所述电源模块。
26.综上所述,本技术包括以下至少一种有益技术效果:
27.1.通过第一gps定位模块、第二gps定位模块和处理器的配合实现对无人机与目标之间距离和偏差的确定,并通过飞行控制器控制无人机进行目标跟踪,同时通过图像采集模块采集目标图像,通过图像识别模块,判断跟踪的目标是否正确,便于实现无人机的精确跟踪,提高跟踪的精确度;
28.2.当由于地形较复杂,在进行目标跟踪时,图像采集模块暂时无法采集到目标图像时,此时处理器输出超声波控制指令,并将超声波控制指令通过第一无线通讯模块和第二无线通讯模块传输至超声波发生器,超声波发生器接收超声波控制指令发出超声波,无
人机本体上的超声波接收器接收超声波,输出超声波接收信号,处理器接收超声波接收信号,输出跟踪信号,飞行控制器接收跟踪信号,进行目标跟踪。
附图说明
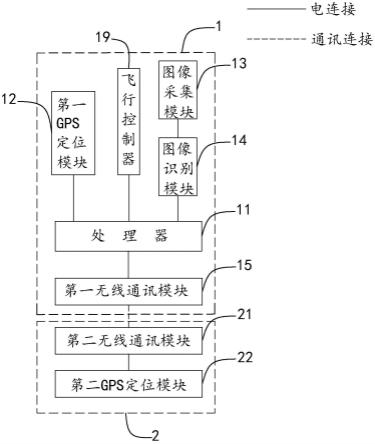
29.图1是本技术提供的无人机跟踪系统的部分结构示意图。
30.图2是本技术提供的无人机跟踪系统的整体结构示意图。
31.附图标记说明:1、无人机本体;11、处理器;12、第一gps定位模块;13、图像采集模块;14、图像识别模块;15、第一无线通讯模块;16、超声波接收器;17、红外线扫描装置;18、录音器;19、飞行控制器;2、标识本体;21、第二无线通讯模块;22、第二gps定位模块;23、超声波发生器;24、电源模块;25、usb接口。
具体实施方式
32.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图1-2及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本技术,并不用于限定本技术。
33.本技术实施例公开一种无人机跟踪系统。参照图1,无人机跟踪系统包括:无人机本体1和目标识别标识,无人机本体1上设置有第一gbs定位模块、图像采集模块13、图像识别模块14、处理器11、飞行控制器19以及第一无线通讯模块15,第一gps定位模块12、图像识别模块14、第一无线通讯模块15和飞行控制器19均与处理器11连接,图像识别模块14还与图像采集模块13连接;目标识别标识包括标识本体2以及设置在标识本体2内的第二无线通讯模块21和第二gbs定位模块,第二gps定位模块22和第二无线通讯模块21连接,第一无线通讯模块15和第二无线通讯模块21通讯连接,实现第二gps定位模块22和处理器11的通讯连接。本实施例中,标识本体2根据实际情况可设计为任意形状,在此不做限制。
34.工作时,将标识本体2设置在追踪目标上,标识本体2与追踪目标之间可通过诸如粘接、卡接等可以实现两者间固定连接的方式连接,在此不做限制;第一gps定位模块12用于对无人机本体1进行定位,并输出第一定位信号,处理器11接收第一定位信号;第二gbp定位模块用于对标识本体2进行定位输出第二定位信号,第二无线通讯模块21接收第二定位信号,并将第二定位信号通过第一无线通讯模块15传输至处理器11,处理器11接收第一定位信号和第二定位信号后,根据第一检测信号和第二检测信号确定无人机本体1与标识本体2间的距离以及偏差,即无人机本体1与跟踪目标之间的距离以及偏差,在处理器11内预先设定有预设跟踪距离。
35.设置在无人机本体1上的图像采集模块13实时采集跟踪目标的图像信息,并将采集到的图像信息传输至图像识别模块14,图像识别模块14对图像信息进行识别,当识别到图像信息中含有目标识别标识时,输出第一识别信息,处理器11接收到第一定位信号、第二定位信号和第一识别信息后,输出第一控制信号,飞行控制器19接收第一控制信号,控制无人机对目标进行跟踪。本实施例中,图像采集模块13为摄像机,摄像机的具体型号可根据跟踪现场的实际情况确定,在此不做限制。
36.参照图2,在一些较为复杂的环境中,例如当目标经过隧道、桥洞等一些较为封闭的环境时,gps定位信号较弱导致,容易出现定位不准确目标丢失的情况,为了改善这一情
况在标识本体2内设置有超声波发生器23,在无人机本体1接设置有超声波接收器16,超声波接收器16连接处理器11,超声波发生器23连接第二无线通讯模块21,当图像识别模块14对图像采集模块13上传的图像信息进行识别,当识别到图像信息中没有目标识别标识时输出第二识别信息,处理器11接收第二识别信息,输出超声波控制指令,第一无线通讯模块15接收超声波控制指令,并将超声波控制指令通过第二无线通讯模块21传输至超声波发生器23,超声波发生器23接收超声波控制指令开始工作,超声波接收器16接收超声波发生器23发出的超声波,输出超声波接收信号,处理器11接收超声波接收信号,输出第二控制信号,飞行控制器19接收第二控制信号,控制无人机靠近跟踪目标,以快速重新找到目标进行跟踪。
37.为了保证无人机在飞行过程中,被障碍物阻挡,影响无人机的飞行,在无人机本体1上设置有红外线扫描装置17,在无人机飞行过程中无线扫描装置实时检测无人机飞行方向是否存在障碍物,当检测到存在障碍物时,输出障碍物检测信号,处理器11接收障碍物检测信号输出第三控制信号,飞行控制器19接收第三控制信号,控制无人机躲避障碍物。
38.在无人机上设置有录音器18,无人机在对目标进行跟踪时,处理器11可通过录音器18采集目标输入的语音,处理器11根据接收到的语音生成第四控制信号,飞行控制器19接收第四控制信号,控制无人机进行相应的动作,本实施例中,处理器为arm处理器,在其他实施方式中,处理器可根据实际情况进行选择,在此不做限制。
39.在标识本体2内还设置有电源模块24,第二gps定位模块22、第二无线通讯模块21和超声波发生器23均与电源模块24连接,电源模块24的设置可为第二gps定位模块22、第二无线通讯模块21和超声波发生器23持续供电,保证目标识别标识的续航,本实施例中,电源模块24为充电电池,在标识本体2上设置有usb接口25,usb接口25连接电源模块24,当电源模块24电量耗尽时,可通过usb接口25连接诶外部电源为电源模块24进行充电。
40.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,本说明书(包括摘要和附图)中公开的任一特征,除非特别叙述,均可被其他等效或者具有类似目的的替代特征加以替换。即,除非特别叙述,每个特征只是一系列等效或类似特征中的一个例子而已。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
