1.以下描述的实施方式涉及通过振动计量仪进行的测量,并且更具体地,涉及检测振动计量仪的取向并基于检测到的取向来补偿测量结果。
背景技术:
2.诸如例如科里奥利质量流量计、液体密度计、气体密度计、流体粘度计、气体/液体比重计、气体/液体相对密度计和气体分子量计的振动计量仪通常是已知的并且用于测量流体的特性。通常,振动计量仪包括传感器组件和计量电子设备。传感器组件内的材料可以是流动的或静止的。振动计量仪可以用于测量传感器组件中的材料的质量流速、密度或其他性能。
3.振动计量仪可以在不同的方向上定向。例如,在传感器组件具有包含材料的两个弯曲导管的情况下,该弯曲导管可以具有管在上取向、管在下取向或旗形取向。附加地,振动计量仪可以以一个取向进行校准并且以不同的取向安装在客户现场处。例如,振动计量仪可以以管在上取向进行校准并且以旗形取向安装在客户现场中。
4.然而,由于因压力而变化的材料密度(即水头压力可能导致材料密度增加)以及由重力的相对方向导致的对振动计量仪的振动特性(例如旋转元件的模态振型)的其他影响,因此传感器组件的取向可能影响振动计量仪的测量结果。例如,由传感器组件在管在下取向上进行的密度测量结果可能大于由相同传感器组件在管在上取向上进行的密度测量结果。因此,存在检测振动计量仪的取向并基于检测到的取向来补偿振动计量仪的测量结果的需要。
技术实现要素:
5.提供了一种用于检测取向并基于检测到的取向来补偿测量结果的计量电子设备。根据实施方式,计量电子设备包括处理系统和被配置成通信地耦接至传感器组件的接口。该处理系统被配置成基于由传感器组件提供的一个或更多个传感器信号来检测传感器组件的取向。
6.提供了一种用于检测取向并基于检测到的取向来补偿测量结果的振动计量仪。根据实施方式,振动计量仪包括传感器组件和通信地耦接至传感器组件的计量电子设备。该计量电子设备被配置成基于由传感器组件提供的一个或更多个传感器信号来检测传感器组件的取向。
7.提供了一种用于检测振动计量仪的取向并基于检测到的取向来补偿测量结果的方法。根据实施方式,该方法包括:从传感器组件接收一个或更多个传感器信号和基于由传感器组件提供的一个或更多个传感器信号来检测传感器组件的取向。
8.各个方面
9.根据一个方面,用于检测取向并基于检测到的取向来补偿测量结果的计量电子设备(20)包括:接口(401),其被配置成通信地耦接至传感器组件(10);以及处理系统(402),
其被配置成基于由传感器组件(10)提供的一个或更多个传感器信号来检测传感器组件(10)的取向。
10.优选地,处理系统(402)被配置成基于一个或更多个传感器信号来检测传感器组件(10)的取向包括:处理系统(402)被配置成基于在由传感器组件(10)提供的一个或更多个传感器信号中的传感器信号中所观察到的传感器组件(10)的一个或更多个振动模式的时间周期来检测取向。
11.优选地,计量电子设备(20)被配置成基于一个或更多个振动模式的时间周期来检测取向包括:计量电子设备(20)被配置成基于根据一个或更多个振动模式中的至少两个振动模式所确定的密度值来检测取向。
12.优选地,处理系统(402)还被配置成基于传感器组件(10)的检测到的取向来补偿测量结果。
13.优选地,处理系统(402)还被配置成基于传感器组件(10)的检测到的取向来补偿测量结果包括:处理系统(402)还被配置成基于传感器组件(10)的检测到的取向与传感器组件(10)的参考取向的关系来补偿测量结果。
14.优选地,参考取向是校准取向。
15.优选地,传感器组件(10)的检测到的取向是管在下取向(500a)、管在上取向(500b)和旗形取向(500c)中的一个。
16.根据一个方面,一种用于检测取向并基于检测到的取向来补偿测量结果的振动计量仪(5)包括传感器组件(10)和通信地耦接至传感器组件(10)的计量电子设备(20)。计量电子设备(20)被配置成基于由传感器组件(10)提供的一个或更多个传感器信号来检测传感器组件(10)的取向。
17.优选地,计量电子设备(20)被配置成基于一个或更多个传感器信号来检测传感器组件(10)的取向包括:计量电子设备(20)被配置成基于在由传感器组件(10)提供的一个或更多个传感器信号中的一个传感器信号中所观察到的传感器组件(10)的或更多个振动模式的时间周期来检测取向。
18.优选地,计量电子设备(20)被配置成基于一个或更多个振动模式的时间周期来检测取向包括:计量电子设备(20)被配置成基于根据一个或更多个振动模式中的至少两个振动模式所确定的密度值来检测取向。
19.优选地,计量电子设备(20)还被配置成基于传感器组件(10)的检测到的取向来补偿测量结果。
20.优选地,计量电子设备(20)还被配置成基于传感器组件(10)的检测到的取向来补偿测量结果包括:计量电子设备(20)还被配置成基于传感器组件(10)的检测到的取向与传感器组件(10)的参考取向的关系来补偿测量结果。
21.优选地,参考取向是校准取向。
22.优选地,传感器组件(10)的检测到的取向是管在下取向(500a)、管在上取向(500b)和旗形取向(500c)中的一个。
23.根据一个方面,一种用于检测振动计量仪的取向并基于检测到的取向来补偿测量结果的方法包括:从传感器组件接收一个或更多个传感器信号,和基于由传感器组件提供的一个或更多个传感器信号来检测传感器组件的取向。
24.优选地,基于一个或更多个传感器信号来检测传感器组件的取向包括:基于如在由传感器组件提供的一个或更多个传感器信号中的一个传感器信号中所观察到的传感器组件的一个或更多个振动模式的时间周期来检测取向。
25.优选地,基于一个或更多个振动模式的时间周期来检测取向包括:基于根据一个或更多个振动模式中的至少两个振动模式所确定的密度值来检测取向。
26.优选地,该方法还包括基于传感器组件的检测到的取向来补偿测量结果。
27.优选地,基于传感器组件的检测到的取向来补偿测量结果包括:基于传感器组件的检测到的取向与传感器组件的参考取向的关系来补偿测量结果。
28.优选地,参考取向是校准取向。
29.优选地,传感器组件的检测到的取向是管在下取向、管在上取向和旗形取向中的一个。
附图说明
30.在所有附图上,相同的附图标记表示相同的元件。应当理解,这些附图不一定按比例绘制。
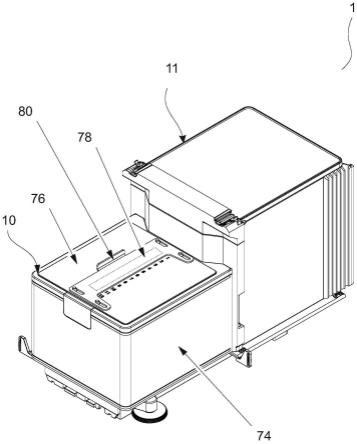
31.图1示出了用于检测取向并基于检测到的取向来补偿测量结果的振动计量仪5。
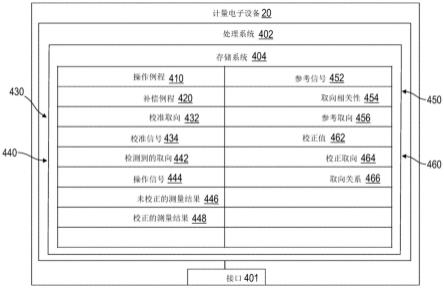
32.图2示出了振动计量仪5的框图,包括计量电子设备20的框图表示。
33.图3a和图3b示出了用于说明诸如上述导管130、130’的导管的振动模式的导管线缆图。
34.图4示出了用于检测振动计量仪的取向并基于检测到的取向来补偿测量结果的计量电子设备20。
35.图5a至图5c示出了振动计量仪5的不同示例性取向。
36.图6示出了振动计量仪的频谱曲线图600。
37.图7示出了说明对振动计量仪取向的检测的校准曲线图700。
38.图7a示出了校准曲线图700的一部分的详细视图。
39.图8示出了检测振动计量仪的取向的方法800。
具体实施方式
40.图1至图8以及以下描述描绘了具体示例以教导本领域技术人员如何做出以及使用检测取向并基于检测到的取向来校正测量结果的实施方式的最佳模式。出于教导发明原理的目的,已经简化或省略了一些常规的方面。本领域技术人员将理解落入本说明书的范围内的来自这些示例的变型。本领域的技术人员将理解,以下描述的特征可以以各种方式进行组合以形成检测取向并基于该取向来校正测量结果的多种变型。因此,以下描述的实施方式不限于以下描述的具体示例,而仅由权利要求及其等同内容来限定。
41.图1示出了用于检测取向并基于检测到的取向来补偿测量结果的振动计量仪5。如图1所示,振动计量仪5包括传感器组件10和计量电子设备20。传感器组件10响应于处理材料的质量流速和密度。计量电子设备20经由引线100连接至传感器组件10,以通过端口26提供密度、质量流速和温度信息以及其他信息。
42.传感器组件10包括一对歧管150和150’、具有法兰颈110和110’的法兰103和103’、
一对平行导管130和130’、驱动器180、电阻式温度检测器(rtd)190以及一对拾取传感器170l和170r。导管130和130’具有两个基本上直的入口支路131、131’和出口支路134、134’,入口支路131、131’和出口支路134、134’在导管安装块120和120’处朝向彼此会聚。导管130、130’沿着其长度在两个对称位置处弯曲,并且在其整个长度上基本上平行。撑杆140和140’用于限定每个导管130、130’在其周围振荡的轴线w和w’。导管130、130’的支路131、131’和134、134’固定地附接至导管安装块120和120’,并且这些块又固定地附接至歧管150和150’。这提供了穿过传感器组件10的连续闭合的材料路径。
43.当具有孔102和102’的法兰103和103’经由入口端104和出口端104’连接至承载被测量的处理材料的处理线(未示出)中时,材料通过法兰103中的孔口101进入计量仪的入口端104,并且通过歧管150被引导至具有表面121的导管安装块120。在歧管150内,材料被分开并且通过导管130、130’输送。在离开导管130、130’时,处理材料在具有表面121’的块120’和歧管150’内重新组合成单个流,并且此后被输送至通过具有孔102’的法兰103’连接至处理线(未示出)的出口端104’。
44.导管130、130’被选择成并且适当地安装至导管安装块120、120’,以分别具有关于弯曲轴线w
‑‑
w和w
’‑‑
w’的基本上相同的质量分布、惯性矩和杨氏模量。这些弯曲轴线穿过撑杆140、140’。由于导管的杨氏模量随温度而变化,并且该变化影响流量和密度的计算,因此将rtd 190安装至导管130’以连续地测量导管130’的温度。导管130’的温度以及因此针对通过rtd 190的给定电流而跨rtd 190出现的电压由穿过导管130’的材料的温度支配。在公知的方法中由计量电子设备20使用跨rtd 190出现的温度相关电压以补偿由于导管温度的任何变化而引起的导管130、130’的弹性模量的变化。rtd 190通过引线195连接至计量电子设备20。
45.导管130、130’两者都由驱动器180绕其相应弯曲轴线w和w’在相反的方向上并且在被称为流量计量仪的第一异相弯曲模式下被驱动。该驱动器180可以包括许多公知布置中的任何一种,例如安装至导管130’的磁体和安装至导管130的相对线圈,并且交流电通过该相对线圈以使两个导管130、130’振动。合适的驱动信号185通过计量电子设备20经由引线施加至驱动器180。
46.计量电子设备20接收引线195上的rtd温度信号,以及出现在引线100上的分别承载左传感器信号165l和右传感器信号165r的传感器信号165。计量电子设备20产生出现在至驱动器180的引线上并且使导管130、130’振动的驱动信号185。计量电子设备20对左传感器信号165l和右传感器信号165r以及rtd信号195进行处理,以计算穿过传感器组件10的材料的质量流速和密度。该信息连同其他信息一起由计量电子设备20作为信号施加在路径26上。以下是对计量电子设备20的更详细的讨论。
47.图2示出了振动计量仪5的框图,包括计量电子设备20的框图表示。如图2所示,计量电子设备20通信地耦接至传感器组件10。如前述参照图1所描述的,传感器组件10包括左拾取传感器170l和右拾取传感器170r、驱动器180和温度传感器190,它们经由一组引线100通过通信信道112通信地耦接至计量电子设备20。
48.计量电子设备20经由引线100提供驱动信号185。更具体地,计量电子设备20向传感器组件10中的驱动器180提供驱动信号185。此外,包括左传感器信号165l和右传感器信号165r的传感器信号165由传感器组件10提供。更具体地,在所示的实施方式中,传感器信
号165由传感器组件10中的左拾取传感器170l和右拾取传感器170r提供。如可以理解的,传感器信号165通过通信信道112分别提供给计量电子设备20。
49.计量电子设备20包括处理器210,处理器210通信地耦接至一个或更多个信号处理器220以及一个或更多个存储器230。处理器210还通信地耦接至用户界面30。处理器210在端口26上经由通信端口与主机通信地耦接,并且经由电力端口250接收电力。处理器210可以是微处理器,但是可以采用任何合适的处理器。例如,处理器210可以包括诸如多核处理器的子处理器、串行通信端口、外围接口(例如,串行外围接口)、片上存储器、i/o端口等。在这些和其他实施方式中,处理器210被配置成对接收到并处理过的信号例如数字化信号执行操作。
50.处理器210可以从一个或更多个信号处理器220接收数字化传感器信号。处理器210还被配置成提供诸如相位差、传感器组件10中的流体的性质等的信息。处理器210可以通过通信端口将信息提供至主机。处理器210还可以被配置成与一个或更多个存储器230进行通信以接收信息和/或将信息存储在一个或更多个存储器230中。例如,处理器210可以从一个或更多个存储器230接收校准因子和/或传感器组件零点(例如,当存在零流量时的相位差)。校准因子和/或传感器组件零点中的每一个可以分别与流量计量仪5和/或传感器组件10相关联。处理器210可以使用校准因子来处理从一个或更多个信号处理器220接收的数字化传感器信号。
51.一个或更多个信号处理器220被示出为包括编码器/解码器(codec)222和模数转换器(adc)226。一个或更多个信号处理器220可以调节模拟信号,将经调节的模拟信号数字化和/或提供数字化信号。codec 222被配置成从左拾取传感器170l和右拾取传感器170r接收传感器信号165。codec 222还被配置成向驱动器180提供驱动信号185。在替选实施方式中,可以采用更多或更少的信号处理器。
52.如所示,传感器信号165经由信号调节器240被提供至codec 222。驱动信号185经由信号调节器240被提供至驱动器180。尽管信号调节器240被示出为单个块,但是信号调节器240可以包括信号调节部件,例如两个或更多个运算放大器、诸如低通滤波器的滤波器、电压至电流放大器等。例如,传感器信号165可以由第一放大器放大,并且驱动信号185可以由电压至电流放大器放大。放大可以确保传感器信号165的幅值接近codec 222的全刻度范围。
53.在所示的实施方式中,一个或更多个存储器230包括只读存储器(rom)232、随机存取存储器(ram)234和铁电随机存取存储器(fram)236。然而,在替选实施方式中,一个或更多个存储器230可以包括更多或更少的存储器。附加地或替选地,一个或更多个存储器230可以包括不同类型的存储器(例如,易失性存储器、非易失性存储器等)。例如,可以采用诸如例如可擦除可编程只读存储器(eprom)等的不同类型的非易失性存储器来代替fram 236。一个或更多个存储器230可以是被配置成存储处理数据例如驱动信号或传感器信号、质量流速或密度测量结果等的存储装置。
54.可以根据下式来生成质量流速测量结果
[0055][0056]
δt项包括操作得出的(即,测量的)时间延迟值,例如,在时间延迟是由于与通过
振动流量计5的质量流速有关的科里奥利效应引起的情况下,该时间延迟值包括拾取传感器信号之间存在的时间延迟。当流动材料流过振动流量计5时,测量的δt项最终确定流动材料的质量流速。δt0项包括零流量校准常数下的时间延迟/相位差。δt0项通常在工厂处被确定,并且被编程到振动流量计5中。零流量下的时间延迟/相位差δt0项将不会改变,即使在流量条件发生改变的情况下。通过将测量的时间延迟(或相位差/频率)乘以流量校准因子fcf来确定流过流量计量仪的流动材料的质量流速。流量校准因子fcf与流量计量仪的物理刚度成比例。
[0057]
关于密度,每个导管130、130’将振动的共振频率可以是导管130、130’的弹簧常数的平方根除以具有材料的导管130、130’的总质量的函数。具有材料的导管130、130’的总质量可以是导管130、130’的质量加上导管130、130’内部的材料的质量。导管130、130’中的材料的质量与材料的密度成正比。因此,该材料的密度可以与包含该材料的导管130、130’振荡的周期的平方与导管130、130’的弹簧常数的乘积成比例。因此,通过确定导管130、130’振荡的周期并且通过适当地缩放结果,可以实现对由导管130、130’包含的材料的密度的精确测量。计量电子设备20可以利用传感器信号165和/或驱动信号185来确定周期或共振频率。导管130、130’可以以多于一种振动模式进行振荡。
[0058]
振动模式
[0059]
图3a和图3b示出了用于说明诸如上述导管130、130’的导管的振动模式的导管线缆图。如图3a和图3b所示,通过线缆310描绘导管。线缆310具有用于反映u形导管的u形,其可以包括左导管和右导管。如图3a和图3b所示,线缆310包括左静止线缆312a和右静止线缆312b。图3a和图3b中还示出了弯曲轴线w—w、w’—w’,其与线缆310的振动节点并置。在图3a中,线缆310还包括左一阶弯曲模式线缆314a和右一阶弯曲模式线缆314b。还示出了左二阶弯曲模式线缆316a和右二阶弯曲模式线缆316b。在图3b中,线缆310包括左一阶扭转模式318a和右一阶扭转模式318b。
[0060]
通过箭头示出左一阶弯曲模式线缆314a与右一阶弯曲模式线缆314b异相180度。即,它们以相反的方式移动。这可以在各种方面是有益的,例如减少由于导管的不平衡位移而引起的振动计量仪的振动。左一阶弯曲模式线缆314a和右一阶弯曲模式线缆314b也被示出为具有与弯曲轴线w—w、w’—w’并置的单个节点。也通过箭头示出左二阶弯曲模式线缆316a与右二阶弯曲模式线缆316b彼此异相180度。然而,左二阶弯曲模式线缆316a和右二阶弯曲模式线缆316b具有两个振动节点,因此被称为“二阶”。左二阶弯曲模式线缆316a和右二阶弯曲模式线缆316b的固有频率可以高于左一阶弯曲模式线缆314a和右一阶弯曲模式线缆314b的固有频率。左一阶扭转模式318a和右一阶扭转模式318b被示出为沿其各自的长度相对于左静止线缆312a和右静止线缆312b具有不对称位移。箭头说明左一阶扭转模式318a和右一阶扭转模式318b彼此异相。
[0061]
通过线缆310示出的振动模式被示出为分开的,但可以叠加到由线缆310建模的导管上。即,由线缆310建模的导管可以具有多个振动模式。例如,导管中的左导管可以具有一阶弯曲模式、二阶弯曲模式和扭转模式。因此,导管可以具有一阶异相弯曲模式、二阶异相弯曲模式和一阶扭转模式。导管可以具有附加的模式,例如更高阶的弯曲模式(例如,三阶、四阶、五阶等)、同相弯曲模式以及更高阶的扭转模式(例如,二阶、三阶、四阶等)。
[0062]
如前述所述,振动模式可以具有形状、幅度和固有频率。可以通过将诸如传感器信
号165的传感器信号相互比较来检测振动模式的形状。由左拾取传感器170l提供的传感器信号与由右拾取传感器信号170r提供的传感器信号之间的相位差可以指示由由于管在弯曲模式或其他模式下振动时通过振动计量仪的流引起的科里奥利力导致的扭转模式激励,并且该相位差可以与导管130、130’之间的相位差成比例。振动模式的幅度可以与传感器信号165的幅度成比例。
[0063]
振动模式的频率可以根据传感器信号165和/或驱动信号185来确定。更具体地,由于每个振动模式具有固有模式频率,因此传感器信号165可以具有对应于导管130、130’的振动模式的分量。因此,可以使用滤波来分离分量以确定每个分量的频率。每个分量的频率对应于振动模式的频率。振动模式的频率可以单独地被称为模式频率。即,模式频率是振动模式的固有频率,其中的每一个固有频率与传感器信号165和/或驱动信号185中的分量对应。
[0064]
振动模式可以具有关系。例如,两个振动模式之间的关系——本文中称为模式关系——可以基于两个振动模式的相位、幅度和频率。在一个示例中,模式关系可以是左二阶弯曲模式线缆316a和右二阶弯曲模式线缆316b的频率与左一阶弯曲模式线缆314a和右一阶弯曲模式线缆314b的频率的差。模式关系可以被量化为模式差。例如,模式关系可以是左二阶弯曲模式线缆316a和右二阶弯曲模式线缆316b的时间周期相对于左一阶弯曲模式线缆314a和右一阶弯曲模式线缆314b的时间周期之间的差。
[0065]
用于检测取向的计量电子设备
[0066]
图4示出了用于检测振动计量仪的取向并基于检测到的取向来补偿测量结果的计量电子设备20。如图4所示,计量电子设备20包括接口401和处理系统402。计量电子设备20例如接收诸如来自传感器组件10的振动响应。计量电子设备20处理振动响应,以便获得流过传感器组件10的流动材料的流动特性。
[0067]
接口401可以从图1和图2中所示的拾取传感器170l、170r中的一个接收传感器信号165。接口401可以执行任何必要的或期望的信号调节,例如任何方式的格式化、放大、缓冲等。替选地,可以在处理系统402中执行信号调节中的一些或全部。此外,接口401可以使计量电子设备20与外部设备之间能够进行通信。接口401能够进行任何方式的电子、光学或无线通信。接口401可以基于振动响应来提供信息。接口401可以与数字转换器例如图2所示的codec 222耦接,其中,传感器信号包括模拟传感器信号。数字器对模拟传感器信号进行采样并将其数字化,并且产生数字化的传感器信号。
[0068]
处理系统402进行计量电子设备20的操作,并且对来自传感器组件10的流量测量结果进行处理。处理系统402执行一个或更多个处理例程并且从而处理流量测量结果以产生一个或更多个流量特性。处理系统402通信地耦接至接口401并且被配置成从接口401接收信息。
[0069]
处理系统402可以包括通用计算机、微处理系统、逻辑电路或一些其他通用或定制处理设备。附加地或替选地,处理系统402可以分布在多个处理设备之中。处理系统402还可以包括任何方式的集成或独立的电子存储介质,例如存储系统404。
[0070]
存储系统404可以存储流量计量仪参数和数据、软件例程、恒定值和可变值。在一个实施方式中,存储系统404包括由处理系统402执行的例程,例如振动测量仪5的操作例程410和补偿例程420。存储系统还可以存储统计值,例如标准偏差、置信区间等。
[0071]
补偿例程420可以针对振动计量仪的取向来补偿测量结果,例如质量流速测量结果。例如,如以下将更详细地描述的,补偿例程420可以基于由传感器组件10提供的一个或更多个传感器信号来检测振动计量仪的传感器组件例如以上所述的传感器组件10的取向。补偿例程420可以基于传感器组件的检测到的取向与传感器组件的参考取向的关系来补偿测量结果,例如质量流速测量结果。参考取向可以是校准取向。
[0072]
因此,存储系统404也可以存储校准信息430。如图4所示,校准信息430包括校准取向432和校准信号434。校准取向432可以是取向列表中的值,所述取向例如管在上取向、管在下取向或旗形取向。校准取向432可以从校准信号434中检测、由用户输入、由加速度计自动地检测等。校准取向432与校准信号434相关联。
[0073]
在振动计量仪5的校准期间可以对校准信号434进行测量和存储。校准信号434可以是传感器信号165的时域采样、示出振动模式的频率的频谱信号、其中每个分量频率与振动模式频率相关联的分量频率列表、分量之间关系的列表、前述的任何合适的组合等。校准信号434与校准取向432相关联。
[0074]
存储系统404还可以存储操作信息440,该操作信息440可以包括与振动计量仪5的安装有关的数据。如图4所示,操作信息440包括检测到的取向442、操作信号444、未校正的测量结果446和校正的测量结果448。检测到的取向442可以是取自取向列表或指向取向列表的值,所述取向例如管在上取向、管在下取向或旗形取向。检测到的取向442可以从操作信号444中检测、由用户输入、由加速度计自动地检测等。检测到的取向442可以是安装取向。检测到的取向442与操作信号444相关联。
[0075]
在振动计量仪5的校准期间可以对操作信号444进行测量和存储。操作信号444可以是传感器信号165和/或驱动信号185的时域采样、示出振动模式的频率的频谱信号、其中每个分量频率与振动模式频率相关联的分量频率列表、分量之间的关系列表、前述的任何合适的组合等。操作信号444可以与检测到的取向442相关联。
[0076]
未校正的测量结果446和校正的测量结果448可以是由振动计量仪5测量的材料参数值。该参数可以是任何合适的参数,例如密度、质量流速或任何导出的值诸如百分比空隙率、混合物密度或混合物组分密度等。未校正的测量结果446可以不对振动计量仪5的检测到的取向进行校正。例如,如果校准取向432是管在上取向并且检测到的取向是管在下取向,则未校正的测量结果446的值可能不等于振动计量仪5在管在上取向上进行的测量结果。然而,如以下将更详细地解释的,未校正的测量结果446可以通过使用校正的测量结果448被校正成校正的测量结果448,从而等于由振动计量仪5在管在上取向上进行的测量结果。
[0077]
存储系统404还可以存储参考信息450,参考信息450可以包括可以用于确定振动传感器5的取向的参考有关数据。如图4所示,参考信息450包括参考信号452和取向相关性454。参考信号452可以是与已知取向相关联的传感器信号。例如,参考信号452可以是分量频率的列表,分量频率中的每一个与给定的振动模式相关联,即与取向相关联。该列表可以用于确定取向特征,例如图4所示的取向相关性454中的一个。参考取向456可以是例如可以在校准期间使用的与参考信号452相关联的取向的列表。因此,参考信号452可以与校准信号434相同。
[0078]
取向相关性454可以是与振动计量仪5的取向相关联的模式关系的列表。例如,取
向相关性454可以是与传感器组件10的取向相关的模式关系的列表。如以下关于图7所解释的,模式关系可以是分别与模式相关联的两个或更多个振动参数值的定量关系例如差和比率,其依赖于管周期和观察密度值,但是可以采用任何合适的参数。
[0079]
仍然参照图4,存储系统404还可以包括校正信息460。校正信息460被示出为包括校正值462、校正取向464和取向关系466。校正值462可以与振动计量仪5的取向相关联。例如,校正值462可以包括值的列表,值中的每一个与振动计量仪5的取向例如图4所示的校正取向464相关联。校正取向464可以包括取向的列表,所述取向为例如管在上取向、管在下取向或旗形取向等。
[0080]
如可以理解的,根据取向之间的关系例如校准取向432与检测到的取向442之间的关系,校正值462可以与校正取向464相关联。这些关系和其他关系可以在取向关系466中。例如,如果校准取向432是管在上取向而检测到的取向是管在下取向,则取向关系可以是管在上与管在下的关系。取向关系466可以将管在上与管在下的关系关联至校正值462中的校正值。因此,可以使用校正值将未校正的测量结果446校正成校正的测量结果448。
[0081]
取向关系466也可以包括校正值462中的两个与取向关系之间的关系。例如,校正值462中的第一校正值可以和管在上与管在下的关系相关联,而第二校正值可以和管在下与管在上的关系相关联。第一校正值与第二校正值之间的差可以和管在下与旗形的关系相关联。即,校准取向432可以是管在下取向而检测到的取向442可以是旗形取向。因此,可以使用第一校正值与第二校正值之间的差将未校正的测量结果446校正成校正的测量结果448。
[0082]
如可以理解的,校准取向432可以总是处于特定取向,例如管在下取向。因此,校正值462可以仅具有三个值,其均通过取向关系466与校正取向464中的管在上取向、管在下取向和旗形取向相关联。然而,取向关系466也可以包括校正值关系与取向关系之间的关系,所述校正值关系例如校正值中的两个之间的关系。
[0083]
如还可以理解的,与无差异的取向关系(例如,管在上与管在上的关系、管在下与管在下的关系、旗形与旗形的关系等,见图5a至图5c)相关联的校正值可以是空值、零等。例如,如果通过与校正值相加来校正未校正的测量结果446,则对于无差异的取向关系校正值可以为零。如果通过乘以校正值来校正未校正的测量结果446,则校正值可以是空值,用于指示不应当执行乘法运算。因此,校正的测量结果448可以与未校正的测量结果446相同。可能需要基于振动计量仪的检测到的取向来进行校正,这意味着可能需要定义取向,如以下参照图5a至图5c所示。
[0084]
示例性取向
[0085]
图5a至图5c示出了振动计量仪5的不同示例性取向。如图5a所示,振动计量仪5具有管在下取向500a,并且在图5b中振动计量仪5具有管在上取向500b。振动计量仪5在图5c中被示出为具有旗形取向500c。在图5a至图5c中,振动计量仪5包括横向轴线510,其可以被定义为横向于材料流动方向。振动计量仪5还包括纵向轴线520。材料流动方向可以被视为在法兰103至法兰103’处与纵轴共线,即使材料可以沿法兰103、103’之间的其他方向流动。
[0086]
图5a至图5c中还示出了管在下重心530a、管在上重心530b和旗形重心530c。振动计量仪的重心可以是支架之间的流体和导管材料的质心,但是可以采用任何合适的质心。如图5a至图5c所示,管在下的横向长度532a对应于管在下的重心530a,管在上的横向长度
532b对应于管在上的重心530b,以及旗形横向长度532c对应于旗形重心530c。旗形纵向长度534c也对应于旗形重心530c。如根据图5a至图5c可以理解的,重心相对于支架位置的位置根据振动计量仪5的取向而不同。更具体地,当振动计量仪5处于管在下取向500a时,相对于管在上取向500b,水头压力会导致材料的密度更大。这会导致振动计量仪5中材料的测量结果不准确。因此,通过检测振动计量仪的取向,可以校正测量结果。
[0087]
检测取向
[0088]
如以下将更详细地解释的,振动计量仪的取向可以通过测量两个或更多个振动模式的传感器信号参数来检测。例如,可以针对一阶弯曲模式和二阶弯曲模式测量振动计量仪中导管的时间周期。这两个时间周期可以用于分别确定观察密度值:一阶观察密度值和二阶观察密度值。可以将第一观察密度值与第二观察密度值之间的差与先前确定的对振动计量仪取向的相关性进行比较以检测振动计量仪的取向。可以使用其他传感器信号参数。
[0089]
图6示出了振动计量仪的频谱曲线图600。如图6所示,频谱曲线图600包括以赫兹(hz)为单位的频率轴610和以分贝(db)为单位的幅度轴620。如可以看到的,频率轴610的范围是从0hz至1000hz,而幅度轴620的范围是从-150db至0db,但是可以采用任何合适的单位和数值范围。频谱曲线图600还包括频谱图630。频谱图630被示出为具有一阶驱动峰632和二阶驱动峰634。还示出了一阶扭转模式峰636和同相弯曲模式峰638。一阶驱动峰632处于约127hz处,并且二阶驱动峰634处于约675hz处。
[0090]
频谱图630可以通过从0hz扫描至1000hz并测量所产生的振动来生成。作为示例,参照上述振动计量仪5,驱动信号185可以是在0hz至1000hz的频率上以固定幅度提供至导管130、130’的正弦信号。当驱动信号185从0hz扫描至1000hz时,可以测量左传感器信号165l和右传感器信号165r的幅度。如可以理解的,一阶驱动峰632以振动计量仪5的固有频率为中心。然而,如在频谱图630中可以看出的,一阶驱动峰632和二阶驱动峰634两者都高于频谱图630的本底噪声,并且因此可以被滤波和测量。
[0091]
一阶驱动峰632可以对应于导管130、130’的一阶弯曲模式。类似地,二阶驱动峰634可以对应于导管130、130’的二阶弯曲模式。因此,在操作期间,驱动信号185可以具有中心分别在约127hz处和约675hz处的两个正弦分量。可以通过中心分别在约127hz处和约675hz处的两个带通滤波器对传感器信号165l、165r进行滤波。codec 222可以在一阶驱动峰632和二阶驱动峰634的频率由于材料流过导管130、130’而变化时跟踪一阶驱动峰632和二阶驱动峰634。
[0092]
因此,可以测量每个振动模式的传感器信号参数并且可以使所述传感器信号参数与导管130、130’中材料的特性相关。例如,驱动信号185和/或传感器信号165l、165r的时间周期和频率可以根据导管130、130’中材料的密度而变化。类似地,驱动信号185和/或传感器信号165l、165r的幅度可以变化。如可以理解的,可以确定材料的其他参数,诸如例如粘度、流速、成分等。
[0093]
如可以理解的,这些传感器信号参数可以与振动模式对应。例如,对应于一阶驱动峰632的一阶弯曲模式可以具有低于对应于二阶驱动峰634的二阶弯曲模式的频率的频率。因此,一阶弯曲模式可以用于生成一阶密度值,并且二阶弯曲模式可以用于生成二阶密度值。如可以理解的,这些密度值应当彼此相等,但是由于振动计量仪的取向,这些密度值可能彼此不相等。因此,如以下讨论所示,密度值或者其他测量值或传感器信号参数的差可以
用于检测振动计量仪的取向。
[0094]
图7示出了说明对振动计量仪取向的检测的校准曲线图700。如图7所示,校准曲线图700包括以克每立方厘米(g/cm3)为单位的密度轴710和以平方微秒(μs2)为单位的平方时间周期轴720。如所指示的,校准曲线图700属于管在下取向上的振动计量仪。校准曲线图700包括校准密度值702。换句话说,如果在管在下取向(与校准取向相同)上测量具有与校准密度值702相同的密度值的未知材料,则观察密度值将等于校准密度值702。
[0095]
如可以看到的,校准曲线图700包括一阶曲线图730和二阶曲线图740。通过在校准期间测量一阶弯曲模式和二阶弯曲模式的管周期来分别获得一阶图730和二阶图740。更具体地,通过在振动计量仪交替地充满水和空气时测量管周期来获得一阶图730和二阶图740。空气的密度为约0.001g/cm3,并且水的密度为约0.9982g/cm3,其在校准曲线图700中分别表示为d1和d2。
[0096]
如图7所示,一阶曲线图730包括一阶校准图732,以及二阶曲线图740包括二阶校准图742。分别地,一阶校准图732具有一阶空气坐标732a和一阶水坐标732b,以及二阶校准图742具有二阶空气坐标742a和二阶水坐标742b。当空气在振动流量计量仪的导管中时,通过分别测量一阶弯曲模式和二阶弯曲模式的管周期来分别确定一阶空气坐标732a和二阶空气坐标742a。类似地,当水在振动流量计量仪的导管中时,通过测量一阶弯曲模式的管周期和二阶弯曲模式的管周期来分别确定一阶水坐标732b和二阶水坐标742b。
[0097]
在多数振动计量仪中,材料的密度与包含该材料的导管的管周期的平方之间存在线性关系。因此,分别地,一阶空气坐标732a包括一阶空气管周期的平方k12和空气密度值d1、以及一阶水坐标732b包括一阶水管周期的平方k22和水密度值d2。类似地,二阶空气坐标742a包括二阶空气管周期的平方k32和空气密度值d1,以及二阶水坐标742b包括二阶水管周期的平方k42和水密度值d2。依靠材料密度与管周期的平方之间的线性关系来生成它们各自的一阶空气坐标732a与一阶水坐标732b以及二阶空气坐标742a与二阶水坐标742b之间的一阶校准图732和二阶校准图742。对于表现出非线性关系的其他振动计量仪,校准图可以被定义为拟合至在其他密度下利用其他流体材料或流体温度以类似方式确定的两个或更多个坐标的多项式或其他曲线。
[0098]
一阶校准图732和二阶校准图742可以用于确定未知材料的密度。例如,在振动计量仪以管在下取向安装并且材料具有等于校准密度值702的密度的情况下,则观察密度值可以等于根据一阶校准图732和二阶校准图742确定的校准密度值702。即,一阶校准图732和二阶校准图742将生成相同的校准密度值702。与校准的密度值702相关联的是作为一阶校准图732上的纵坐标的一阶校准管周期的平方736a以及作为二阶校准图742上的纵坐标的二阶校准管周期的平方746a。
[0099]
然而,振动计量仪可以以不同于校准期间使用的管在下取向来安装。当振动计量仪以与校准取向不同的取向安装时,一阶校准图732和二阶校准图742可以不生成校准密度值702。此外,一阶校准图732和二阶校准图742可以分别生成不相等的一阶密度值734和二阶密度值744。如以下所解释的,观察密度值之间的该差可以用于确定测量期间振动计量仪的取向。
[0100]
当振动计量仪以旗形取向安装时,一阶校准图732和二阶校准图742可以分别生成分别对应于一阶旗形管周期的平方736b和二阶旗形管周期的平方746b的一阶旗形密度值
734b和二阶旗形密度值744b。当振动计量仪以管在上取向安装时,一阶校准图732和二阶校准图742可以分别生成分别对应于一阶管在上管周期的平方736c和二阶管在上管周期的平方746c的一阶管在上密度值734c和二阶管在上密度值744c。如可以看出的,一阶旗形密度值734b和二阶旗形密度值744b彼此不相等。一阶管在上密度值734c和二阶管在上密度值744c也彼此不相等。以下参照图7a更详细地讨论了一阶密度值734与二阶密度值744之间的差。
[0101]
图7a示出了校准曲线图700的一部分的详细视图。如图7a所示,二阶曲线图740的密度轴与表示一阶旗形密度值734b、一阶管在上密度值734c、二阶旗形密度值744b和二阶管在上密度值744c的线相交。如所期望的,管在下的密度差δρ
在下
等于零,这是因为振动计量仪是在管在下的取向上校准的。如可以理解的,旗形密度差δρ
旗形
不等于管在上密度差δρ
旗形
。如还可以理解的,管在上密度差δρ
旗形
是旗形密度差δρ
旗形
大小的约两倍。因此,可以检测振动计量仪的取向。
[0102]
例如,计量电子设备20可以存储将管在上密度差δρ
在上
与管在上取向相关并将旗形密度差δρ
旗形
与旗形取向相关的取向相关性454。该相关性可以通过例如操作频率、管周期等来索引。即,管在上密度差δρ
在上
或旗形密度差δρ
旗形
的值可以与振动计量仪5的操作频率成比例地不同。取向相关性454可以是任何合适的形式,例如相对于其他参数的或对其他参数进行操作的百分比、比率等,所述其他参数例如振动计量仪5的操作频率、观察密度值等。可以在取向相关性454中使用除密度以外的值。例如,取向相关性454可以将振动计量仪5中的导管130的时间周期或时间周期的平方、或者时间周期的差或时间周期的平方的差与振动计量仪5的取向相关。这些相关性和其他相关性可以用于确定诸如上述的振动计量仪5的振动计量仪的取向,然后其可以用于校正测量结果。
[0103]
相关性可以推广到传感器信号参数或其他材料参数。例如,振动的时间周期可以表示为t
mo
,其中“mo”表示模式(m)和阶数(o)。模式可以分别由β和ζ表示为弯曲模式和扭转模式。阶数可以由1、2、3表示。因此一阶弯曲模式和一阶扭转模式可以分别表示为β1和ζ1。一阶弯曲模式和二阶弯曲模式可以表示为β1和β2。因此,可以将差定义为t
β1-t
β2
。其可以简化为δt
β1β2
。该命名法可以用于材料参数,诸如例如密度。使用一阶弯曲模式和二阶弯曲模式确定的密度之间的密度差可以定义为ρ
β1-ρ
β2
,其可以简化为δρ
β1β2
。
[0104]
基于取向来补偿测量结果
[0105]
下表说明了如何基于振动计量仪的取向来补偿测量结果。在下表中,列和行以管在下、管在上和旗形这三个取向为表头,但是可以采用任何合适的取向和/或对取向的描述。下表还包括由字母
‘
a’和
‘
b’指定的以未校正测量结果的百分比表示的校正值。如所示,校正值a、b与从校准取向到当前取向的变化相关联。即,a是从管在下校准到旗形操作的校正值(以读数的百分数表示)。b是从管在下校准到管在上操作的校正值(以读数的百分数表示)。
[0106]
管在下校准到管在上操作可以是振动计量仪的参考取向与检测到的取向之间的关系。即,参考取向可以是校准取向并且检测到的取向可以是当前取向。此外,参照以上的图4,校准取向可以是参考取向456中的值,当前取向可以是校正取向464中的值,并且参考取向与检测到的取向之间的关系可以是取向关系466中的值。
[0107][0108]
因此,当当前取向与校准取向相同时,则上表返回空值,指示未校正的测量结果可以不进行校正。因此,可以将未校正的测量结果作为准确的测量结果提供。当校准取向是管在下而当前取向是管在上时,则校正值可以是b。可以利用b通过例如将未校正测量结果乘以b与未校正的测量结果相加来校正未校正的测量结果。如也可以从上表中看出的,管在上校准取向对旗形取向具有a-b的校正值。即,可以通过将未校正测量结果乘以a与b的差与未校正的测量结果相加来校正未校正的测量结果。
[0109]
方法
[0110]
图8示出了检测振动计量仪的取向的方法800。如图8所示,方法800,在步骤810中,接收来自传感器组件的一个或更多个传感器信号。传感器组件可以与上述传感器组件10相同,但是可以采用任何合适的传感器组件。一个或更多个传感器信号可以通过例如上述接口401来接收。接口401和/或处理系统402可以对一个或更多个接收到的传感器信号进行调节、采样、数字化、压缩和/或扩展、抽取等。在步骤820中,方法800基于由传感器组件提供的一个或更多个传感器信号来检测传感器组件的取向。上述处理系统402可以检测取向。
[0111]
方法800,在步骤820中,可以基于如在由传感器组件提供的一个或更多个传感器信号中的一个传感器信号中所观察到的传感器组件的一个或更多个振动模式的时间周期来检测取向。例如,可以基于一个或更多个振动模式的时间周期来检测取向包括:基于根据一个或更多个振动模式中的至少两个振动模式所确定的密度值来检测取向。在以上参照图7和图7a所述的一个示例中,方法800可以将一阶旗形密度值734b与二阶旗形密度值744b进行比较以确定传感器组件处于旗形取向。该比较可以是两个密度值之间的差,或者可以相对于校准的密度值702进行比较。例如,可以将一阶旗形密度值734b与校准密度值702之间的差同二阶旗形密度值744b与校准密度值702之间的差进行比较。可以采用诸如比较时间周期、频率等的其他方式来检测取向。附加地,可以采用多于两个振动模式。
[0112]
方法800还可以基于传感器组件的检测到的取向来补偿测量结果。例如,可以基于传感器组件的检测到的取向与传感器组件的参考取向的关系来补偿测量结果。参照上表的示例,检测到的取向与参考取向的关系可以是当前取向例如旗形取向与校准取向例如管在下取向的关系。该关系确定校正值为a。该值可以应用于校正对传感器组件中材料的例如密
度或体积流速的测量的测量结果。如从上表中可以看到的,传感器组件的当前取向和/或校准取向可以是管在下取向、管在上取向和旗形取向。然而,可以采用其他取向。
[0113]
上述振动计量仪5、计量电子设备20和方法800可以检测传感器组件10的取向并校正测量结果。因此,校正的测量结果可以是准确的。可以基于由传感器组件10提供的传感器信号来检测取向,并且因此不需要附加的硬件。因此,可以在可以被配置成例如使传感器组件10以两个或更多个震动模式振动的任何振动计量仪中检测取向。这可以包括安装在现场的振动计量仪。可以通过传感器信号的任何合适的参数或根据传感器信号确定的任何合适的参数,例如使用从两个或更多个振动模式中确定出的密度值,来检测取向,并且因此,取向可以按照需要进行配置以减少计算资源同时保持期望的准确度。尽管可以采用任何合适的参数例如管周期或频率,但是由于例如可以采用温度校正来确定密度值,一阶弯曲模式和二阶弯曲模式的密度值可能更准确。
[0114]
上述实施方式的详细描述并不是发明人认为在本说明书的范围内的所有实施方式的详尽描述。实际上,本领域技术人员将认识到,上述实施方式的某些元素可以被不同地组合或消除以创建其他实施方式,并且这样的其他实施方式在本说明书的范围和教导内。对于本领域普通技术人员明显的是,上述实施方式可以整体或部分地组合以创建在本说明书的范围和教导内的另外的实施方式。
[0115]
因此,尽管在本文中出于说明性目的描述了特定实施方式,但是如本领域技术人员将认识到的,在本说明书的范围内的各种等效修改是可能的。本文中提供的教导可以应用于其他计量电子设备、振动计量仪以及用于检测和校正振动计量仪的取向的方法,而不仅应用于上述和附图中所示的实施方式。因此,上述实施方式的范围应当根据所附权利要求来确定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。