技术特征:
1.一种对准涡轮机壳体内的部件的方法,所述涡轮机壳体包括被构造为共同围绕转子的上部壳体和下部壳体,所述转子具有转子轴线,所述方法包括:对于沿着所述转子轴线的至少一个主要轴向位点并且在每个主要轴向位点处在所述涡轮机壳体的一侧或两侧处:在所述上部壳体在顶部放置位置联接到所述下部壳体的情况下,测量:第一参考点在联接到所述下部壳体的水平接头(hj)凸缘的外表面的第一光学目标处的第一位点,以及第二参考点在联接到所述下部壳体的所述hj凸缘的所述外表面并且与所述第一光学目标竖直间隔开的第二光学目标处的第二位点;在至少所述上部壳体在顶部移开位置从所述下部壳体移除的情况下,测量:所述第一参考点在所述第一光学目标处的第三位点,所述第二参考点在所述第二光学目标处的第四位点,第三参考点在所述下部壳体的所述水平接头(hj)凸缘的上表面上的第五位点,所述第三参考点与所述下部壳体中的所述部件在相应的主要轴向位点处的部件支撑位置具有已知的空间关系,以及第四参考点在所述下部壳体的所述hj凸缘的所述上表面上的第六位点,所述第四参考点在所述下部壳体的所述hj凸缘的所述上表面上与所述第三参考点间隔开;基于至少所述第一位点、所述第二位点、所述第三位点、所述第四位点、所述第五位点和所述第六位点以及所述下部壳体的内半径来计算所述部件支撑位置在所述顶部放置位置的预测偏移值;以及通过所述预测偏移值来调整所述涡轮机壳体中的所述部件支撑位置,其中在将所述上部壳体更换到所述顶部放置位置后相对于所述转子轴线改进定位在所述部件支撑位置处的所述部件的对准。2.根据权利要求1所述的方法,其中所述至少一个主要轴向位点包括多个主要轴向位点。3.根据权利要求2所述的方法,其中所述涡轮机壳体的所述一侧或两侧包括所述涡轮机壳体的两侧,并且针对所述涡轮机壳体的第一侧计算所述部件支撑位置在所述顶部放置位置的所述预测偏移值包括针对所述涡轮机壳体的相对第二侧解出所述部件支撑位置在所述顶部放置位置的所述预测偏移值。4.根据权利要求1所述的方法,还包括从所述下部壳体中移除所述上部壳体并且从所述下部壳体移除所述转子和下部隔膜中的至少一者,从而形成所述顶部移开位置。5.根据权利要求1所述的方法,其中所述第一光学目标和所述第二光学目标联接到所述下部壳体的所述hj凸缘的径向面向的外表面。6.根据权利要求1所述的方法,其中所述部件包括隔膜部分、内壳体部分和一个或多个固定喷嘴部分中的至少一者,并且其中调整改变所述部件支撑位置以在将所述涡轮机的所述上部壳体更换到所述顶部放置位置后改进所述部件与所述转子轴线的对准。7.根据权利要求1所述的方法,对于沿着所述转子轴线的不同于每个主要轴向位点并且包括所述第一光学目标而不是所述第二光学目标的至少一个次级轴向位点,并且在每个
次级轴向位点处在所述涡轮机壳体的一侧或两侧处:在所述上部壳体在所述顶部放置位置联接到所述下部壳体的情况下,测量:第七参考点在联接到所述下部壳体的所述hj凸缘的所述外表面的所述第一光学目标处的第七位点;在至少所述上部壳体在所述顶部移开位置从所述下部壳体移除的情况下,测量:所述第七参考点在所述第一光学目标处的第八位点,第八参考点在所述下部壳体的所述hj凸缘的所述上表面上的第九位点,所述第八参考点与所述下部壳体中的所述部件在相应的次级轴向位点处的所述部件支撑位置具有已知的空间关系,以及第九参考点在所述下部壳体的所述hj凸缘的所述上表面上的第十位点,所述第九参考点在所述下部壳体的所述hj凸缘的所述上表面上与所述第八参考点间隔开;针对所述至少一个次级轴向位点,基于所述第七位点、所述第八位点、所述第九位点和所述第十位点以及所述下部壳体的内半径来计算所述部件支撑位置在所述顶部放置位置的所述预测偏移值;以及通过所述预测偏移值来调整所述涡轮机壳体中在所述至少一个次级轴向位点处的所述部件支撑位置,其中在将所述上部壳体更换到所述顶部放置位置后相对于所述转子轴线改进对于所述至少一个次级轴向位点定位在所述部件支撑位置处的所述部件的所述对准。8.根据权利要求1所述的方法,其中计算所述预测偏移值包括:识别所述第三参考点在所述下部壳体的所述hj凸缘的所述上表面上的所述第五位点,所述第四参考点在所述下部壳体的所述hj凸缘的所述上表面上的所述第六位点,以及所述第一参考点在所述第一光学目标处的所述第三位点之间的三角形空间关系;通过计算从所述转子轴线延伸到所述第一光学目标在所述顶部放置位置的所述第一位点的第一矢量与从所述转子轴线穿过所述第一光学目标在所述顶部移开位置的所述第三位点的第二矢量之间的角度来确定所述下部壳体的所述hj凸缘围绕所述转子轴线的旋转角度(α);基于在所述顶部放置位置在所述第一位点处的所述第一参考点和所述下部壳体的所述hj凸缘围绕所述转子轴线的所述旋转角度(α)将所述三角形空间关系平移到所述顶部放置位置,所述平移为处于所述顶部放置位置的所述第三参考点形成预测的顶部放置位点;计算所测量的所述第三参考点的所述第五位点与所述第三参考点的所预测的顶部放置位点之间的任何竖直差(δz);以及基于所述下部壳体的所述hj凸缘的任何竖直差(δz)计算竖直调整,其中所述调整包括基于所述竖直调整和所述第三参考点与所述下部壳体中的所述部件的所述部件支撑位置的所述已知的空间关系来调整所述部件支撑位置以对所述部件支撑位置进行升高或下降中的一种。9.根据权利要求8所述的方法,其中计算所述预测偏移值还包括:通过计算延伸穿过所述第一光学目标和所述第二光学目标在所述顶部放置位置的所述第一位点和所述第二位点的第一参考线和延伸穿过所述第一光学目标和所述第二光学目标在所述顶部移开位置的所述第三位点和所述第四位点的第二参考线之间的角度来确定所述下部壳体的所述hj凸缘的倾斜角度(β);
计算所测量的所述第三参考点的所述第五位点与所述第三参考点的所预测的顶部放置位点之间的任何竖直差(δz);以及基于所述下部壳体的所述hj凸缘的任何竖直差(δz)和所述倾斜角度(β)计算所述竖直调整。10.根据权利要求8所述的方法,其中计算所述预测偏移值包括:在所述下部壳体的第一侧处计算所述第一光学目标在所述顶部放置位置的所述第一位点与所述第一光学目标在所述顶部移开位置的所述第三位点之间的第一水平差(δy1);在所述下部壳体的第二侧处计算所述第一光学目标在所述顶部放置位置的所述第一位点与所述第一光学目标在所述顶部移开位置的所述第三位点之间的第二水平差(δy2);以及对所述第一水平差(δy1)和第二水平差(δy2)求和以获得水平调整,并且其中所述调整包括基于所述水平调整和所述第三参考点与所述下部壳体中的所述部件的所述部件支撑位置的所述已知的空间关系来调整所述部件支撑位置。11.根据权利要求8所述的方法,其中计算所述预测偏移值还包括:在所述上部壳体处于要安装到所述下部壳体的位置的情况下,基于所述倾斜角度(β)计算所述上部壳体上的所述第三参考点和第五参考点附近的内部位点,或所述上部壳体上的所述第四参考点和第六参考点附近的外部位点处的任何间隙;基于至少所述下部壳体的所述第一位点、所述第二位点、所述第三位点、所述第四位点、所述第五位点和所述第六位点以及任何间隙来计算所述部件支撑位置在所述顶部放置位置的所述预测偏移值;以及通过所述预测偏移值来调整所述涡轮机壳体中的所述部件支撑位置,其中在将所述上部壳体更换到所述顶部放置位置后相对于所述转子轴线改进定位在所述部件支撑位置处的所述部件的对准。12.根据权利要求1所述的方法,其中计算所述预测偏移值包括:在所述下部壳体的第一侧处计算所述第一光学目标在所述顶部放置位置的所述第一位点与所述第一光学目标在所述顶部移开位置的所述第三位点之间的第一水平差(δy1);在所述下部壳体的第二侧处计算所述第一光学目标在所述顶部放置位置的所述第一位点与所述第一光学目标在所述顶部移开位置的所述第三位点之间的第二水平差(δy2);以及对所述第一水平差(δy1)和第二水平差(δy2)求和以获得水平调整,并且其中所述调整包括基于所述水平调整和所述第三参考点与所述下部壳体中的所述部件的所述部件支撑位置的所述已知的空间关系来调整所述部件支撑位置。13.根据权利要求1所述的方法,其中计算所述预测偏移值还包括:在至少所述上部壳体在所述顶部移开位置从所述下部壳体移除的情况下:识别穿过所述下部壳体的所述hj凸缘的所述第三参考点和所述第四参考点的第一参考线;识别穿过所述上部壳体的所述hj凸缘的下表面上的第五参考点和第六参考点的第二参考线,所述第五参考点在所述顶部放置位置与所述第三参考点对准,并且所述第六参考
点在所述顶部放置位置与所述第四参考点对准;通过将处于所述顶部移开位置的所述上部壳体的所述hj凸缘的所述转子轴线与处于所述顶部移开位置的所述下部壳体的所述hj凸缘的所述转子轴线叠加来建立所述第一参考线与所述第二参考线之间的角度关系;基于所述第一参考线与所述第二参考线之间的所述角度关系以及所述下部壳体的所述内半径,计算所述第三参考点和所述第五参考点附近的内部位点,或所述第四参考点和所述第六参考点附近的外部位点处的任何间隙;基于至少所述下部壳体的所述第一位点、所述第二位点、所述第三位点、所述第四位点、所述第五位点和所述第六位点以及任何间隙来计算所述部件支撑位置在所述顶部放置位置的所述预测偏移值;以及通过所述预测偏移值来调整所述涡轮机壳体中的所述部件支撑位置,其中在将所述上部壳体更换到所述顶部放置位置后相对于所述转子轴线改进定位在所述部件支撑位置处的所述部件的对准。14.一种用于对准涡轮机壳体内的部件的系统,所述涡轮机壳体包括被构造为共同围绕转子的上部壳体和下部壳体,所述转子具有转子轴线,所述系统包括:测量模块,所述测量模块被配置为:对于沿着所述转子轴线的至少一个主要轴向位点并且在每个主要轴向位点处在所述涡轮机壳体的一侧或两侧处:在所述上部壳体在顶部放置位置联接到所述下部壳体的情况下,接收对以下各项的测量:第一参考点在联接到所述下部壳体的水平接头(hj)凸缘的外表面的第一光学目标处的第一位点,以及第二参考点在联接到所述下部壳体的所述hj凸缘的所述外表面并且与所述第一光学目标竖直间隔开的第二光学目标处的第二位点;在至少所述上部壳体在顶部移开位置从所述下部壳体移除的情况下,接收对以下各项的测量:所述第一参考点在所述第一光学目标处的第三位点,所述第二参考点在所述第二光学目标处的第四位点,第三参考点在所述下部壳体的所述水平接头(hj)凸缘的上表面上的第五位点,所述第三参考点与所述下部壳体中的所述部件在相应的主要轴向位点处的部件支撑位置具有已知的空间关系,以及第四参考点在所述下部壳体的所述hj凸缘的所述上表面上的第六位点,所述第四参考点在所述下部壳体的所述hj凸缘的所述上表面上与所述第三参考点间隔开;以及计算模块,所述计算模块被配置为:基于至少所述第一位点、所述第二位点、所述第三位点、所述第四位点、所述第五位点和所述第六位点以及所述下部壳体的内半径来计算所述部件支撑位置在所述顶部放置位置的预测偏移值,并且基于所述预测偏移值来指示在所述至少一个主要轴向位点处对所述涡轮机壳体中的所述部件支撑位置的调整。
15.根据权利要求14所述的系统,其中对于沿着所述转子轴线的不同于每个主要轴向位点并且包括所述第一光学目标而不是所述第二光学目标的至少一个次级轴向位点,并且在每个次级轴向位点处在所述涡轮机壳体的一侧或两侧处,所述测量模块进一步接收对以下各项的测量:在所述上部壳体在所述顶部放置位置联接到所述下部壳体的情况下,第七参考点在联接到所述下部壳体的所述hj凸缘的所述外表面的所述第一光学目标处的第七位点;以及在至少所述上部壳体在所述顶部移开位置从所述下部壳体移除的情况下:所述第七参考点在所述第一光学目标处的第八位点,第八参考点在所述下部壳体的所述hj凸缘的所述上表面上的第九位点,所述第八参考点与所述下部壳体中的所述部件在相应的次级轴向位点处的所述部件支撑位置具有已知的空间关系,以及第九参考点在所述下部壳体的所述hj凸缘的所述上表面上的第十位点,所述第九参考点在所述下部壳体的所述hj凸缘的所述上表面上与所述第八参考点间隔开;并且其中所述计算模块进一步:针对所述至少一个次级轴向位点,基于所述第七位点、所述第八位点、所述第九位点和所述第十位点以及所述下部壳体的内半径来计算所述部件支撑位置在所述顶部放置位置的所述预测偏移值。16.根据权利要求14所述的系统,其中所述计算模块计算所述预测偏移值包括:通过计算延伸穿过所述第一光学目标和所述第二光学目标在所述顶部放置位置的所述第一位点和所述第二位点的第一参考线和延伸穿过所述第一光学目标和所述第二光学目标在所述顶部移开位置的所述第三位点和所述第四位点的第二参考线之间的角度来确定所述下部壳体的所述hj凸缘的倾斜角度(β);识别所述第三参考点在所述下部壳体的所述hj凸缘的所述上表面上的所述第五位点,所述第四参考点在所述下部壳体的所述hj凸缘的所述上表面上的所述第六位点,以及所述第一参考点在所述第一光学目标处的所述第三位点之间的三角形空间关系;通过计算从所述转子轴线延伸到所述第一光学目标在所述顶部放置位置的所述第一位点的第一矢量与从所述转子轴线穿过所述第一光学目标在所述顶部移开位置的所述第三位点的第二矢量之间的角度来确定所述下部壳体的所述hj凸缘围绕所述转子轴线的旋转角度(α);基于在所述顶部放置位置在所述第一位点处的所述第一参考点和所述下部壳体的所述hj凸缘围绕所述转子轴线的所述旋转角度(α)将所述三角形空间关系平移到所述顶部放置位置,所述平移为处于所述顶部放置位置的所述第三参考点形成预测的顶部放置位点;计算所测量的所述第三参考点的所述第五位点与所述第三参考点的所预测的顶部放置位点之间的任何竖直差(δz);以及基于所述下部壳体的所述hj凸缘的任何竖直差(δz)和所述倾斜角度(β)计算包括所述竖直调整的所述预测偏移值。17.根据权利要求16所述的系统,其中计算所述预测偏移值还包括:在所述上部壳体处于要安装到所述下部壳体的位置的情况下,基于所述倾斜角度(β)计算所述上部壳体上的所述第三参考点和第五参考点附近的内部位点,或所述上部壳体上
的所述第四参考点和第六参考点附近的外部位点处的任何间隙;以及基于至少所述下部壳体的所述第一位点、所述第二位点、所述第三位点、所述第四位点、所述第五位点和所述第六位点以及任何间隙来计算所述部件支撑位置在所述顶部放置位置的所述预测偏移值。18.根据权利要求14所述的系统,其中计算所述预测偏移值还包括:在所述下部壳体的第一侧处计算所述第一光学目标在所述顶部放置位置的所述第一位点与所述第一光学目标在所述顶部移开位置的所述第三位点之间的第一水平差(δy1);在所述下部壳体的第二侧处计算所述第一光学目标在所述顶部放置位置的所述第一位点与所述第一光学目标在所述顶部移开位置的所述第三位点之间的第二水平差(δy2);以及对所述第一水平差(δy1)和第二水平差(δy2)求和以获得水平调整,所述水平调整形成所述预测偏移值的至少一部分。19.一种涡轮机壳体,其包括:上部壳体,所述上部壳体具有上部水平接头(hj)凸缘;下部壳体,所述下部壳体具有下部水平接头(hj)凸缘,其中所述上部壳体和所述下部壳体被构造为共同围绕涡轮机转子和联接到所述涡轮机转子的多个涡轮机叶片;和多个第一光学目标,每个第一光学目标定位在沿着所述下部壳体的所述下部hj凸缘的径向面向的外表面延伸的多个轴向位点中的一个轴向位点处。20.根据权利要求19所述的涡轮机壳体,还包括定位在所述多个轴向位点中的一个或多个轴向位点处的第二光学目标,每个第二光学目标与相应的第一光学目标竖直间隔开。
技术总结
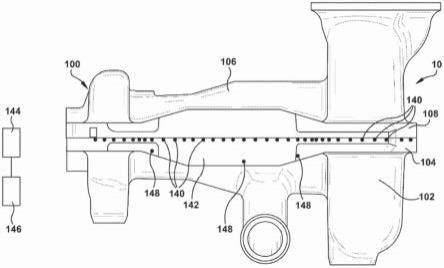
本发明公开了一种用于对准涡轮机壳体(100)内的部件的方法和系统,以及相关涡轮机壳体。在顶部放置位置,测量光学目标(140)和另一竖直间隔的光学目标(148)在接头凸缘上的位点。在移除至少上部壳体(106)之后,再次测量光学目标的位点,并且测量一对参考点在水平接头凸缘的上表面上的位点。基于该位点,针对处于顶部放置位置的部件支撑位置计算预测偏移值。预测偏移值可包括部分地基于多个参考点的三角形空间关系的平移和/或倾斜角度的竖直调整,水平调整,以及水平接头凸缘表面变形调整。通过预测偏移值来调整部件支撑位置以改进对准。准。准。
技术研发人员:K
受保护的技术使用者:通用电气公司
技术研发日:2019.10.28
技术公布日:2022/6/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。