1.本发明涉及使用塑料材料注射模制机的塑料产品注射模制领域,塑料材料注射模制机设有具有第一模具构件和第二模具构件的模具,并使用模内贴标技术。
背景技术:
2.模内贴标是生产塑料制品的一种公知技术。本文中,当模具打开时,将标签放置在模具的第一模具构件的每个模具中。在模制阶段,标签与模制塑料产品成为整体。模制阶段结束后,模具打开,已知会导致产品保留在第二模具构件上。
3.在该领域中,已知许多自动化装置构造成处理标签,以使标签正确安装在第一模具构件上。在已知的实施例中,这些装置还构造成从第二模具构件处卸载产品,通常与标签的处理同时进行。
4.nl1032959、jp2009096012、cn105965498和cn203994424中公开了现有技术自动装置的示例。
5.随着人们普遍希望每个产品使用更少的塑料材料,例如用于注射模制的(食品)包装产品,所谓的薄壁注射模制已变得很有吸引力。这种技术允许在极短的周期内批量生产极薄的薄壁产品。例如,对于壁厚小于0.025英寸(0.62毫米)且流动长度与壁厚之比大于200的食品包装容器,就根据这种技术生产。
技术实现要素:
6.本发明旨在提供一种与塑料材料注射模制机一起使用的改进的自动模内标签处理和产品卸载装置。例如,在极短的周期时间方面寻求改进,例如在使用薄壁注射模制技术生产产品时。也为了稳定性,特别是为了自动装置中的部件的高速度,而寻求改进。此外,在能源使用方面也寻求改进。
7.本发明通过提供根据权利要求1所述的与塑料材料注射模制机一起使用的自动模内标签处理和产品卸载装置来实现上述一个或多个目标。
8.本发明的自动模内标签处理和产品卸载装置构造成与塑料材料注射模制机一起使用,该注射模制机机包括带有第一模具构件和第二模具构件的模具。这些第一模具构件和第二模具构件适于在模具的打开位置和关闭位置之间沿水平延伸的x轴相对于彼此移位。在一些实施例中,第一模具构件和第二模具构件中的一个将固定不动,而另一个模具构件则适于由注射模制装置的机构来移位,以关闭和打开模具。这是一种非常传统的布置。本发明装置还可应用于所谓的叠层模具,其包括三个或三个以上堆叠布置的模具构件,它们相对于彼此移位。
9.将塑料材料注射到模具中可以通过各种布置来完成。例如,经由第一模具上的注射点或第二模具上的注射点进行注射。例如,所进行的注射可以位于标签侧,或位于与标签相对的产品侧。还设想了其他安排。
10.本发明装置包括两个主臂,实施为:
[0011]-标签处理臂,在标签处理臂的外端设有标签保持件,该标签保持件构造成可释放地保持一个或多个标签,
[0012]-产品卸载臂,在产品卸载臂的外端设有产品夹持件,该产品夹持件构造成可释放地保持一个或多个模制的塑料产品,
[0013]
按照本技术领域的惯例,模具可设计成在每个模具周期生产多个产品,例如,在模具中呈矩形排布的四个产品。
[0014]
按照本技术领域的惯例,标签保持件可构造成同时保持多个标签,这些标签对应于模具的产品腔/芯布置。
[0015]
按照本技术领域的惯例,标签夹持件可构造成同时保持多个产品,这些产品对应于模具的产品腔/芯布置。
[0016]
例如,标签保持件构造成保持四个标签,产品夹持件构造成保持四个产品,模具构造成在一个周期内注射模制四个模内贴标的塑料产品。显然,其他数字,例如超过四个,也是可能的。
[0017]
本发明装置具有固定框架。在实际实施例中,框架驻于注射模制机旁边,通常位于模具打开和关闭的位置,以使本发明装置的主臂可以在打开的第一模具构件和第二模具构件之间横向地、优选水平地引入。
[0018]
本发明装置包括两个线性引导装置:
[0019]-第一线性引导装置,该第一线性引导装置支承标签处理臂,以沿着垂直于所述x轴的y轴方向在缩回位置和延伸位置之间往复运动,
[0020]-第二线性引导装置,该第二线性引导装置支承产品卸载臂,以沿着垂直于所述x轴的y轴方向在缩回位置和延伸位置之间往复运动,
[0021]
本文中,在延伸位置,标签处理臂上的标签保持件和产品卸载臂上的产品夹持件在x方向上与相应的模具构件对齐。因此,这些部件位于当时打开的模具的模具构件之间。
[0022]
在本发明装置中,第一线性引导装置相对于框架被引导,从而可平行于x轴移动。在本发明装置中,第二线性引导装置也相对于框架被引导,从而可平行于x轴移动。由于这些引导装置各自支承本发明装置的相应臂,这些臂也可相对于框架沿x轴方向移动,从而相对于模具构件移动。
[0023]
本发明装置具有标签处理臂x轴驱动机构,该标签处理臂x轴驱动机构带有相应的第一驱动马达和第一变速器,第一驱动马达安装在框架上,第一变速器联接到第一驱动马达和第一线性引导装置。
[0024]
本发明装置具有产品卸载臂x轴驱动机构,该产品卸载臂x轴驱动机构有相应的第二驱动马达和第二传动装置,第二驱动马达安装在框架上,第二传动装置联接到第二驱动马达和第二线性引导装置。
[0025]
将这些第一驱动马达和第二驱动马达安装在框架上,使得装置的部件实现轻量化设计,这些部件在操作期间必须以极高的速度移动,例如,鉴于注射模制机的周期极短。如果这些马达中的一个或两个安装在任何此类移动部件上,移动部件的重量将显著增加,从而导致与振动、精度、装置中的应力、过度的驱动要求、能耗等相关的问题。
[0026]
本发明装置还具有y轴驱动布置,包括至少一个安装在框架上的y轴驱动马达,以
及将至少一个y轴驱动马达联接到所述标签处理臂和所述产品卸载臂以进行运动的传动装置。同样,将该至少一个y轴驱动马达安装在装置的框架上是有利的。
[0027]
本发明装置还包括控制第一驱动马达、第二驱动马达和至少一个y轴驱动马达的控制装置,所有这些马达安装在框架上,并且在装置运行期间不跟随高速移动部件一起移动。
[0028]
控制装置构造成,在模制周期的注射模制阶段结束后,并且当模具被带入打开位置时,操作至少一个y轴马达,以使标签处理臂和产品卸载臂前进到其各自的延伸位置,该延伸位置位于第一模具构件和第二模具构件之间的间隙中。这样做是为了使标签保持件在x轴方向上与第二模具构件对齐,并指向第二模具构件;并且使产品夹持件在x轴方向上与第一模具构件对齐,并指向第一模具构件。
[0029]
在延伸位置,操作第一驱动马达以使设有对齐的标签保持件的标签处理臂前进到第二模具构件,从而实现将一个或多个由此保持的标签转移到第二模具构件。
[0030]
在延伸位置,操作第二驱动马达以使带有对齐的产品夹持部的产品卸载臂前进到第一模具构件,从而实现将一个或多个注射模制的产品从第一模具构件转移到产品夹持件。
[0031]
在完成标签转移后,操作第一驱动马达以从第二模具构件处撤回设有标签保持件的标签处理臂。
[0032]
在完成产品转移之后,操作第二驱动马达以从第一模具构件处撤回带有产品夹持件的产品卸载臂,该产品夹持件持有一个或多个产品。
[0033]
由于提供了独立控制的第一驱动马达和第二驱动马达,标签保持件和产品夹持件可以各自以最佳方式相对于相应的模具构件移动,并且彼此独立。这意味着标签转移和产品夹持动作可以同时进行。模具构件之间的间隙也可以保持有限的尺寸。
[0034]
为了完成本发明装置的运动周期,操作至少一个y轴马达,将标签处理臂和产品卸载臂从其各自的延伸位置缩回至其缩回位置。在关闭/打开模具时,该缩回位置在第一模具构件和/或第二模具构件的轨迹之外。
[0035]
按照本领域的惯例,可操作处于缩回位置的产品夹持件,以将被夹持的产品弹出,例如,进入容器或传送器。
[0036]
按照本领域的惯例,可向处于缩回位置的标签保持件提供一个或多个新标签。
[0037]
例如,产品夹持件实施为基于真空抽吸来夹持产品。
[0038]
例如,标签保持件实施为基于真空抽吸来保持标签。标签可带加载静电,用于静电保持在模具表面。
[0039]
应当理解,由于本发明的设计,不需要在标签保持件和标签处理臂之间提供任何可致动的位移机构。该臂本身的运动足以对标签保持件正确进行相对于模具构件的定位,以实现一个或多个标签的转移。作为高度优选,本发明装置不在标签保持件和标签处理臂之间提供任何可致动的位移机构。这样可以减轻移动部件上的重量,并提高设备的运行可靠性。
[0040]
应当理解,由于本发明的设计,产品夹持件和产品卸载臂之间不需要任何可致动的位移机构。该臂本身的运动足以对产品夹持件正确进行相对于模具构件的定位,以实现从第二模具处夹取一个或多个产品。作为高度优选,本发明装置不在产品夹持件和产品卸
载臂之间提供任何可致动的位移机构。这样可以减轻移动部件上的重量,并提高设备的运行可靠性。
[0041]
在实施例中,第一线性引导装置和第二线性引导装置中的每一个都包括水平定向并沿y方向延伸的细长底架,其中每个底架都具有一个或多个沿y方向延伸的线性轴承轨道,并且其中每个臂都设有轴承构件,例如在臂的内端,轴承构件沿y轴方向在各自的线性轴承轨道上滑动。
[0042]
在实施例中,框架在框架的固定位置中具有一个或多个(例如多个平行的)x轴轨道,x轴轨道在x轴方向上支承和引导第一线性引导装置和第二线性引导装置。例如,引导装置的靠近其内端和外端的位置在轨道上受到支承。例如,引导装置被悬挂在x轴轨道的下方。
[0043]
在实施例中,第一驱动马达和第一线性引导装置之间的第一传动装置包括线性带驱动件。例如,第一驱动马达驱动可旋转轴,该轴安装到框架的固定位置并沿y轴方向延伸,其中该轴装配有一个或多个从动滑轮,例如两个滑轮,其中框架支承一个或多个返回滑轮,返回滑轮在x轴方向上与该轴隔开,其中有带在从动滑轮和返回滑轮上行进,例如多条带,其中每条带固定到第一线性引导装置,例如固定到第一线性引导装置的底架。
[0044]
在实施例中,第一驱动马达是电驱动马达,并且构造成根据指令在每个方向上驱动可旋转轴。
[0045]
在实施例中,第二驱动马达和第二线性引导装置之间的第二传动装置包括线性带驱动件。例如,第二驱动马达驱动可旋转轴,该轴安装到框架的固定位置并沿y轴方向延伸,其中该轴装配有一个或多个从动滑轮,例如两个滑轮,其中框架支承一个或多个返回滑轮,返回滑轮在x轴方向上与该轴隔开,其中有带在从动滑轮和返回滑轮上运行,例如两条带,其中每条带固定到第二线性引导装置,例如固定到第二线性引导装置的底架。
[0046]
在实施例中,第二驱动马达是电驱动马达,并且构造成根据指令在每个方向上驱动可旋转轴。
[0047]
在实施例中,第一线性引导装置的底架承载两个滑轮,这两个滑轮在y轴方向上隔开,例如一个位于底架的内端,一个则位于底架的外端,其中有带装配在滑轮周围,其中带连接到标签处理臂,其中一个滑轮,例如内端滑轮是从动滑轮,使带沿选定方向移动,从而使得标签处理臂沿y轴方向移入和移出,所述从动滑轮连接到安装到框架的至少一个y轴驱动马达。
[0048]
在实施例中,第二线性引导装置的底架承载两个滑轮,这两个滑轮在y轴方向上隔开,例如一个位于底架的内端,一个则位于底架的外端,其中有带装配在滑轮周围,其中带连接到产品卸载臂,其中一个滑轮,例如内端滑轮是从动滑轮,使带沿选定方向移动,从而使得产品卸载臂沿y轴方向移入和移出,所述从动滑轮连接到安装在框架上的至少一个y轴驱动马达。
[0049]
在实施例中,提供y轴驱动马达,用于驱动可旋转轴,该轴安装到框架的固定位置并沿x轴方向延伸,其中该轴延伸穿过第一线性引导装置的驱动滑轮和第二线性引导装置的驱动滑轮。
[0050]
在一个实施例中,标签保持件和产品夹持件具有兼容的机械接口,构造成允许标签保持件和产品夹持件中的每一个都机械连接到两个臂中的选定的一个。
[0051]
本发明还涉及一种用于处理模内标签并从塑料材料注射模制机处卸载产品的方法,该塑料材料注射模制机包括带有第一模具构件和第二模具构件的模具,所述第一模具构件和第二模具构件适于在所述模具的打开位置和关闭位置之间沿水平延伸的x轴相对于彼此移位,其中使用如本文所述的自动模内标签处理和产品卸载装置。
[0052]
应当理解,当产品为无模内标签的注射模制产品时,也可使用本文所述的系统。在这种情况下,由于不需要处理标签,因而标签保持件将不存在。
[0053]
本发明还涉及一种注射模制系统,其包括如本文所述的自动模内标签处理和产品卸载装置,以及塑料材料注射模制机,该塑料材料注射模制机包括带有第一模具构件和第二模具构件的模具,所述第一模具构件和第二模具构件适于在所述模具的打开位置和关闭位置之间沿水平延伸的x轴相对于彼此移位。
[0054]
本发明还涉及一种模制具有模内标签的塑料产品的方法,其中使用如本文所述的注射模制系统。
附图说明
[0055]
现在将参考附图阐释本发明。在附图中:
[0056]
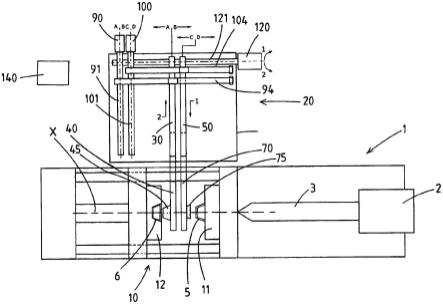
图1示出了根据本发明的注射模制系统的平面示意图,该注射模制系统包括注射模制机以及自动模内标签处理和产品卸载装置,
[0057]
图2示出了根据本发明的自动模内标签处理和产品卸载装置的示例的一部分的仰视立体图,
[0058]
图3从不同角度示出了图2的装置,
[0059]
图4示出了图2的装置的一部分的仰视立体图,以及
[0060]
图5示出了图4的部分的俯视立体图。
具体实施方式
[0061]
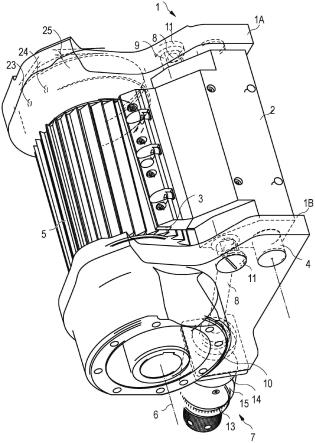
在图1中,附图标记1表示塑料材料注射模制机,例如,用于在非常短的周期时间内实施上述薄壁注射成型。例如,在本发明的应用范围内设想最多3秒的周期时间,但根据产品的不同,也可能出现更长的周期时间。例如,机器1用于注射模制薄壁包装产品,例如盖子和容器。
[0062]
一般地,机器1包括具有挤出筒3的挤出机2。
[0063]
机器1还包括模具10。在实际实施例中,模具10将是可更换的模具,以在机器1上制造不同的产品。
[0064]
模具10包括第一模具构件11和第二模具构件12。这些第一模具构件11和第二模具构件12适于在模具10的打开位置(在图1中示出)和关闭位置之间沿水平延伸的x轴相对于彼此移位。
[0065]
图1示意性地示出了模制的塑料产品5。
[0066]
图1示意性地示出了模内标签6。
[0067]
图1还示意性地示出了与塑料材料注射模制机1一起使用的自动模内标签处理和产品卸载装置20。如将理解的,图2到图5详细示出了这种装置20的示例性实施例。因此,在适当的情况下,图1和图2到图5中的部件被给予相同的附图标记。
[0068]
装置20具有固定框架21,例如,框架21将安装在机器1的旁边,在模具10打开和关闭的位置。例如,框架21固定至机器1旁边的地板。
[0069]
例如,如图2到图5所示,框架21具有垂直立柱22和由立柱22支承的顶部框架结构23。
[0070]
装置20包括标签处理臂40,标签处理臂40在其外端设有标签保持件45。标签保持件45构造成可释放地保持一个或多个标签6,标签6为模内贴标技术而制作,以在模具10中的生产期间与模制的塑料产品5成整体。
[0071]
装置20包括产品卸载臂70,产品卸载臂70在其外端设有产品夹持件75。产品夹持件75构造成可释放地夹持一个或多个模制的塑料产品5。
[0072]
图1示意性地示出了标签保持件45和产品夹持件75。
[0073]
在图2、图3中,未示出标签保持件45和产品夹持件75。在图4、图5中,仅示出了标签保持件45和产品夹持件75的基板。按照本领域的惯例,可以将一个或多个标签保持件构件附着在标签保持件的基板上,例如用螺栓。按照本领域的惯例,可以将一个或多个产品夹持件构件附着在产品夹持件的基板上,例如用螺栓。
[0074]
装置20包括第一线性引导装置30。第一线性引导装置30支承标签处理臂40,以相对于第一线性引导装置30沿着垂直于所述x轴x的y轴方向在缩回位置和延伸位置之间往复运动。
[0075]
装置20包括第二线性引导装置50。第二线性引导装置50支承产品卸载臂70,以相对于第二线性引导装置70沿着垂直于所述x轴x的y轴方向在缩回位置和延伸位置之间往复运动。
[0076]
图1示意性地示出了臂40、臂70的延伸位置。其他附图示出了缩回位置。
[0077]
例如,如图所示,第一线性引导装置30和第二线性引导装置50中的每一个包括水平定向并沿y方向延伸的细长底架31、细长底架51。每个底架都有内端和外端。本文中,外端是指向机器1的端部,而底架的内端远离机器1。
[0078]
例如,如图所示,每个底架31、底架51具有一个或多个沿y方向延伸的线性轴承轨道32、线性轴承轨道52,例如,如此处所示,位于底架的底侧。每个臂40、臂70在其内端设有轴承构件41、轴承构件71,例如,如图所示,在臂40、臂70的顶侧,轴承构件41、轴承构件71在各自的线性轴承轨道32、线性轴承轨道52上沿y轴方向滑动。
[0079]
第一线性引导装置30相对于框架21被引导,从而可平行于x轴移动。
[0080]
第二线性引导装置50相对于框架21被引导,从而可平行于x轴移动。
[0081]
如图2到图5所示,框架21在固定位置上具有平行的x轴轨道24、x轴轨道25,x轴轨道在x轴方向上支承和引导第一线性引导装置30和第二线性引导装置50。例如,引导装置30和引导装置50的靠近其内端和外端的位置在轨道24和轨道25上受到支承。如图所示,每个引导构件底架31、引导构件底架51可设有x轴轴承构件33、x轴轴承构件34、x轴轴承构件53、x轴轴承构件54,x轴轴承构件在x轴轨道24、x轴轨道25上滑动,x轴轨道固定安装在框架21上。
[0082]
例如,如图所示,引导装置30、引导装置50被悬挂在x轴轨道24、x轴轨道25的下方。
[0083]
装置20具有标签处理臂x轴驱动机构,其带有安装在框架21上的相应的第一驱动马达90。该马达90经由第一传动装置联接到第一线性引导装置30。
[0084]
装置20具有产品卸载臂x轴驱动机构,其带有安装在框架21上的相应的第二驱动马达100。该马达100经由第二传动装置联接到第二线性引导装置50。
[0085]
通常,装置20具有y轴驱动布置,包括至少一个安装在框架21上的y轴驱动马达120,以及将至少一个y轴驱动马达120联接到标签处理臂40和产品卸载臂70的传动装置,以使标签处理臂40和产品卸载臂70在其各自的延伸位置和收缩位置之间运动。
[0086]
如图所示,第一驱动马达90和第一线性引导装置30之间的第一传动装置包括线性带驱动件。
[0087]
第一驱动马达90驱动可旋转轴91,可旋转轴91安装到框架21的固定位置并沿y轴方向延伸。轴91装配有一个或多个从动滑轮,在此有两个滑轮92、滑轮93。框架21在x轴方向上支承一个或多个返回滑轮,返回滑轮与轴91隔开。有带在从动滑轮和返回滑轮上行进,此处是带94、带95。每条带94、带95固定到第一线性引导装置30,此处固定到其底架31,此处固定在间隔位置。
[0088]
第一驱动马达90是电驱动马达,并且构造成根据指令在每个方向上驱动可旋转轴。因此,引导装置30可以在x轴方向上高速且准确地移位。
[0089]
如图所示,第二驱动马达100和第二线性引导装置50之间的第二传动装置包括线性带驱动件。
[0090]
第二驱动马达100驱动可旋转轴101,可旋转轴101安装到框架21的固定位置并沿y轴方向延伸,在此与轴91平行且相邻。轴101装配有一个或多个从动滑轮,在此有两个滑轮102、滑轮103。框架21在x轴方向上支承一个或多个返回滑轮,返回滑轮与轴101隔开。有带在从动滑轮和返回滑轮上行进,此处是带104、带105。每条带104、带105固定到第二线性引导装置50,此处固定到其底架51,此处固定在间隔位置。
[0091]
第二驱动马达100是电驱动马达,并且构造成根据指令在每个方向上驱动可旋转轴。因此,引导装置50可以在x轴方向上高速且准确地移位。
[0092]
第一驱动马达90和第二驱动马达100以及第一传动装置和第二传动装置分别从可独立控制的传动系传送到引导装置30、引导装置50,从而能够独立控制臂40、臂70的x轴方向运动。更具体地,标签保持件相对于模具构件的运动可以独立地由产品夹持件相对于模具构件的运动来完成。并且,如上所述,驱动这些运动的驱动马达90、驱动马达100安装在框架21上。
[0093]
如图2到图5所示,引导装置30的底架承载两个滑轮35、滑轮36,滑轮35和滑轮36在y轴方向上隔开,例如,一个在底架31的内端,一个在底架31的外端。带37装配在滑轮35、滑轮36周围。带37在其内端连接到臂40。内端滑轮35是从动滑轮,使带37沿选定方向移动,从而使臂40沿y轴方向移入和移出。
[0094]
如图2到图5所示,引导装置50的底架承载两个滑轮55、滑轮56,滑轮35和滑轮36在y轴方向上隔开,例如,一个在底架51的内端,一个则在底架31的外端。带57装配在滑轮55、滑轮56周围。带57在其内端与臂70连接。内端滑轮55是从动滑轮,使带57沿选定方向移动,从而使臂70沿y轴方向移入和移出。
[0095]
在实际示例中,该例程可以在很短的时间内执行,例如,与总共最多3秒的注射模制周期同步。
[0096]
臂在y方向上的加速度在前进和后退运动中都可超过10g,以实现极短的例程时
间。由于臂只携带用于保持标签或夹持产品的必需部件,这是可能的,这些部件不会在x方向和y方向上执行任何运动,因为这些运动由布置在固定框架上的马达控制。臂40、臂70本身也最好是轻质的,例如碳纤维等。
[0097]
如图2到图5所示,臂40、臂70优选实施为板状体,臂40、臂70在y轴上具有长度,在z轴上具有高度,在x轴上具有宽度。高度是宽度的若干倍,以实现臂的高稳定性。
[0098]
如图所示,臂40、臂70可具有相同的形状,并连接到引导装置和处于外端的标签保持件/产品夹持件。例如,这可以实现替换臂的库存成本的降低。
[0099]
在一个实施例中,标签保持件45和产品夹持件75具有兼容的机械接口,构造成允许标签保持件和产品夹持件中的每一个都机械连接到两个臂40、臂70中的选定的一个。
[0100]
在一个实施例中,标签保持件45和产品夹持件75可以在装置20的臂40、臂70之间交换,例如,考虑到使用不同模具对不同产品进行模制。因此,考虑图1,产品保持件75将安装在臂40上,标签保持件安装在臂70上。
[0101]
如图2到图5所示,在一个实施例中,有y轴驱动马达120,该y轴驱动马达120使标签处理臂40和产品卸载臂70在其各自的延伸位置和缩回位置之间一致移动。
[0102]
此处的驱动马达120驱动可旋转轴121,可旋转轴121安装到框架21的固定位置并沿x轴方向延伸。轴121延伸穿过内端滑轮35和内端滑轮55,或者可以以其他方式可旋转地连接到这种内端滑轮。
[0103]
y轴驱动马达120是电驱动马达,并且构造成根据指令在每个方向上驱动输出轴和连接到该输出轴的可旋转轴121。因此,驱动滑轮35和滑轮55,从而驱动带37和带57,使臂40和臂70相对于相关引导装置30和引导装置50在y轴方向上以同步的方式移动。
[0104]
由于结构原因,仅提供一个y轴驱动马达120被认为是有利的,例如,优选允许引导装置30、引导装置50在设计上类似,例如,由于内滑轮35和内滑轮55现在可以位于同样的空间位置。
[0105]
需要注意,在替代实施例中,可以提供两个y轴驱动马达,每个马达经由相应的轴与内滑轮35、内滑轮55中的一个配合,以在y轴方向上为每个臂40、臂70提供独立的传动系。
[0106]
如图所示,标签保持件45相对于模具构件12的x轴运动,例如基板和附着在其上的一个或多个标签保持件构件的x轴运动,仅由引导装置30的x轴驱动装置控制。装置20不在标签保持件45和标签处理臂40之间提供任何可致动的位移机构。
[0107]
如图所示,产品夹持件75相对于模具构件11的x轴运动,例如基板和附着在其上的一个或多个夹持件构件的x轴运动,仅由引导装置50的x轴驱动装置控制。装置20不在产品夹持件75和产品卸载臂70之间提供任何可致动的位移机构。
[0108]
设置控制装置140,例如计算机化和程序化的控制器,以控制装置20的操作,包括控制第一驱动马达90、第二驱动马达100和y轴驱动马达120。优选地,装置140还连接到挤出机2的控制器。
[0109]
控制装置140经过配置(例如编程),以在注射模制阶段结束后,在模具10已被带入打开位置时,装置20行动以在模具构件12上放置一个或多个新标签6,并从其他模具构件11处移除一个或多个注射模制的塑料制品5。这是通过高速执行的例程来完成的,该例程包括操作y轴驱动马达120,使标签处理臂40和产品卸载臂70从其缩回位置前进到处于第一模具构件11和第二模具构件12之间的间隙中的其相应的延伸位置(见图1),使标签保持件45在x
轴方向与第二构件12对齐,并指向所述第二模具构件12,并且使产品夹持件75在x轴方向与第一模具构件11对齐,并指向所述第一模具构件11。如本文所示,在本实施例中,臂40、臂70一致移动。
[0110]
一旦臂40、臂70已延伸,该例程包括操作第一x轴驱动马达90,以使设有对齐的标签保持件45的标签处理臂40前进到第二模具构件12,从而将由此保持的一个或多个标签6转移到第二模具构件12。例如,通过真空抽吸将一个或多个标签6保持在保持件45上。转移时,该真空被释放。在实施例中,标签6可以借由带静电的标签6和金属模具构件之间的静电结合保持在模具构件中。例如,使用静电施加装置146将静电放置在标签6上。替代方式是使用真空抽吸将标签6保持在模具构件中。
[0111]
通常,在标签处理臂40和标签保持件45进行上述x运动的同时,操作第二驱动马达100以使带有对齐的产品夹持件75的产品卸载臂70前进到第一模具构件11,从而使夹持件75与存在于模具构件11上的一个或多个产品5接合。然后操作夹持件75以执行其夹取动作,这可能例如意味着应用真空抽吸来夹取产品和/或实现机械夹取。由此实现将一个或多个注射模制产品从第一模具构件11转移到产品夹持件75。
[0112]
在完成标签转移后,操作第一驱动马达90以从第二模具构件12处撤回设有标签保持件45的标签处理臂70。
[0113]
在完成产品转移到夹持件75之后,操作第二驱动马达100以从第一模具构件11处撤回带有产品夹持件75的产品卸载臂70,该产品夹持件75持有一个或多个产品5。
[0114]
应当理解,由于存在单独的传动系,标签保持件45和夹持件75的x运动可以独立执行。这样可以优化每个运动,并使这些操作具有较高的整体速度。
[0115]
在例程的最后一步中,操作y轴马达120以将标签处理臂40和产品卸载臂70从其各自的延伸位置缩回至其缩回位置,缩回位置在关闭模具时位于第一模具构件11和/或第二模具构件12的轨迹之外。
[0116]
如本领域已知的,现在可以将一个或多个新标签6装载到标签保持件45上。
[0117]
如本领域已知的,现在产品5可以从夹持件75处释放。例如,产品落在传送器上或容器中,或转移到其他处理装置。
[0118]
从图2到图5中可以理解,臂40、臂70在此处实施为允许交换标签保持件45和产品夹持件75的位置,因此现在标签保持件面向挤出机,产品夹持件背离挤出机。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。