1.本发明涉及微纳米机器人技术领域,特别是一种精准治理污水的纳米机器人。
背景技术:
2.微纳米机器人由于体积小,能够无损穿过生物组织等特点,因此在生物医学、环境检测和处理等多个领域具有非常重要的潜在作用。
3.目前,微纳米机器人,通常是通过微纳米马达来实现驱动的,微纳米马达在溶液中随时间不断变化呈现无规则运动,但通过磁场、超声、光、电等方法能够实现对微纳米马达的导航和速度的精准调空,从而使得在现实应用中成为可能。
4.但是,目前的微纳米马达的导航控制并没有达到理想的精确控制,作为核心的微纳米马达不能精确控制,那么纳米机器人的性能也势必受到影响。
技术实现要素:
5.本发明的目的在于克服现有技术的缺点,提供一种可控性高、能对各部位分别进行精准控制、能够根据实际情况进行自转和前进、动力大的精准治理污水的纳米机器人。
6.本发明的目的通过以下技术方案来实现:一种精准治理污水的纳米机器人,包括:
7.仿生本体,其内装有纳米马达,纳米马达内装有过氧化氢燃料;
8.用于多种污水处理的探针,其包括由自组装的烷基硫醇构成的长链、烷基硫醇的极性头部官能团,其连接在仿生本体的头部处。
9.进一步地,所述的探针,其极性头部官能团,根据不同的污水情况来选择,其外层包括但不限于以下枝链层:
10.修饰au/ni/pt枝链层,用于清除污水中的油性液体;
11.伴刀豆凝集素a接枝,用于清理大肠杆菌;
12.修饰mg-au janu,用于清理有机物;
13.修饰pt-fe,用于清理染料废水;
14.修饰表面修饰凝血酶-atp,用于清理蛋白质;
15.修饰有特异性单链dna,用于清理核酸;
16.高水溶性氨基葡萄糖祸合哇琳/罗丹明基团,用于络合汞离子。
17.可选地,所述的仿生本体的头部为锥形头;仿生本体,其头部大于其中部,其头部与其中部相连;仿生本体的中部,其前端的表面上开有流出孔;
18.锥形头的后端面处具有pt催化层,过氧化氢燃料经管筒输送至pt催化层后发生催化分解,催化分解后释放氧气和氢气时给锥形头形成自驱动。
19.进一步地,所述的锥形头包括多个锥形层叠合而成;多个锥形层叠合时,从内至外依次为pt催化层、fe-ni磁性层、ti惰性层、au薄层。
20.进一步地,所述的纳米马达通过管筒经流出孔引至锥形头处;
21.管筒的前端经含有偶氮苯的材质封闭,紫外线照射偶氮苯来实现管筒的开闭,从
而控制管筒输送过氧化氢的开闭,从而实现引导控制。
22.可选地,所述的仿生本体,其中部设置处的外表面处设置有齿轮,齿轮每个齿的同顺时针侧/逆时针侧沉积有铂层;当齿轮上的铂层与过氧化氢接触时,将过氧化氢催化分解为水和氧气,形成自驱动,于是实现本体的转动。
23.可选地,所述的仿生本体上嵌设有磁性的段或层;由柔性的铂—金—银—锡纳米线构成,其中铂—金段负责催化,而金—银—锡段负责磁场驱动,使催化与磁驱动模式之间快速简单的切换;
24.所述的仿生本体不对称设置,由于铂—金段的存在,仿生本体发生自转动。
25.可选地,所述的仿生本体上嵌设有磁性的段或层;所述的仿生本体上,具有装饰连接处,用于选择性的装载和运输货物。
26.可选地,所述的仿生本体,其尾部处装有氟碳乳液燃料,其尾部还连接有喷气结构;
27.在超声波作用下,氟碳乳液燃料被汽化,从喷气结构中喷出,从而推动纳米机器人高速运动。
28.进一步地,所述的喷气结构包括多个尾管,尾管内嵌有磁层,通过磁场控制尾管的摆动方向,控制纳米机器人前进的方向;所述的尾管呈dna链状。
29.可选地,所述的仿生本体,其尾部装有聚二甲基硅氧烷,其尾部还连接有仿生尾;
30.仿生本体的尾部处,还设置有含有偶氮苯的表层,其将内部的聚二甲基硅氧烷封闭;
31.仿生尾处,具有pt层;
32.在紫外线的照射下,含有偶氮苯的表层打开,让聚二甲基硅氧烷释放,从而与仿生尾处的pt层进行催化反应,形成反冲击;
33.在可见光照射下,含有偶氮苯的表层关闭。
34.进一步地,所述的仿生本体呈仿生鱼状。
35.本发明具有以下优点:
36.用于不同污水的探针的设置,能够根据污水的具体情况,进行精准治理;
37.通过反应条件与运动速度的关系,能够对溶液中物质的含量、反应条件进行定量监测;并且运动速度降低时,在污染处停留时间长,能重复对污水进行处理,实现监测和治理的一体化;
38.(3)仿生本体,各个不同的部位,通过多种不同形式进行驱动,实现对各部位动作的精准控制,从而提高动作和引导精度,同时还提高运动速度;
39.(4)锥形头的结构,既能通过过氧化氢与pt催化层的的作用,实现前进;
40.又能通过,fe-ni磁性层,通过磁场能够进行引导;
41.并且,还通过分子梭来进行控制;
42.(5)在仿生本体嵌有磁性的段或层,而仿生本体的不对称设置,使得仿生本体能够自转动;
43.同时仿生本体的磁性的段或层,还能通过磁场牵引;
44.(6)在仿生本体中部,通过设置齿轮以及齿轮齿上的沉淀pt层,让齿轮转动,从而实现纳米机器人的悬浮;
45.(7)在尾部有两者设计,一种是通过紫外线光的条件,让聚二甲基硅氧烷与pt层反应,进行推动;
46.或者通过超声波条件,引导氟碳乳液燃料汽化,实现推动,并且推动速度及其快;此外,尾管还设有磁层,通过外加磁场,能够控制尾管的摆动,利于精准控制纳米机器人的前进方向;
47.(8)氧化物溶液中加入肼或银离子,提高纳米或马达的速度和驱动力。
附图说明
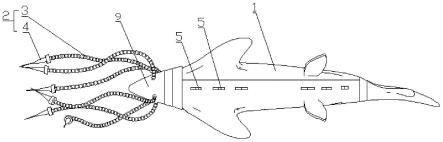
48.图1为本发明的结构示意图;
49.图2为本发明的内部结构示意图;
50.图3为本发明的另一角度结构示意图;
51.图4为本发明尾部通过尾管驱动的结构示意图;
52.图5为图4内部的结构示意图;
53.图中:1-仿生本体,2-探针,3-长链,4-极性头部官能团,5-齿轮,6-螺旋状尾部,7-纳米马达,8-管筒,9-锥形头。
具体实施方式
54.下面结合附图对本发明做进一步的描述,但本发明的保护范围不局限于以下所述。
55.如图1~图3所示,一种精准治理污水的纳米机器人,包括仿生本体1、多个探针2;其中,仿生本体1内装设有纳米马达7,纳米马达7内装有过氧化氢燃料;多个探针2连接在仿生本体1头部上。
56.本方案中,探针2其包括由自组装的烷基硫醇构成的长链3、烷基硫醇的极性头部官能团4,其连接在仿生本体1的头部处。其中,其极性头部官能团4,根据不同的污水情况来选择,其外层包括但不限于以下枝链层:修饰au/ni/pt枝链层,用于清除污水中的油性液体;伴刀豆凝集素a接枝,用于清理大肠杆菌;修饰mg-au janu,用于清理有机物;修饰pt-fe,用于清理染料废水;修饰表面修饰凝血酶-atp,用于清理蛋白质;修饰有特异性单链dna,用于清理核酸;高水溶性氨基葡萄糖祸合哇琳/罗丹明基团,用于络合汞离子。当然,在仿生本体1的表面,同样可以设置相应的枝链层。
57.本实施例中,仿生本体1的头部为锥形头9,锥形头8的后端面处具有pt催化层,纳米马达7内的过氧化氢通过管筒8引至锥形头9处。过氧化氢燃料经管筒8输送至pt催化层后发生催化分解,催化分解后释放氧气和氢气时给锥形头9形成向前的力,形成牵引。
58.进一步地,锥形头8包括4层叠合而成;从内至外依次为pt催化层、fe-ni磁性层、ti惰性层、au薄层。
59.更进一步地,在pt催化层掺杂碳纳米管,提高速度。具体地,管状微马达的内部pt表面对过氧化氢燃料催化分解,生成的氧气气泡产生连续推进力;推动马达向前运动;过氧化物燃料通过管前端的小开口进入微型锥管中,微管腔内的铂催化层激;活过氧化氢燃料分解,产生氧气,并随之成核形成气泡,一旦气泡从马达后方的出口分离,微马达便保持管内没有气泡的原始形状以迎接下一个运动循环(不断重复,从而使机器人能在低雷诺数下
运动)。
60.再进一步地,仿生本体1的中部的前端处开有流出孔,锥形头9大于仿生本体1中部的前端,纳米马达7内的过氧化氢筒管筒8排出,然后经过流出孔与锥形头8上的pt催化层接触。
61.本实施例中,仿生本体11的中部表面,还设置有装饰连接处,可用于选择性的装载和运输货物,选择性的加载相应的功能,加载组装后在进行定向运输。
62.为了控制方向,在仿生本体1中,也嵌设有磁性的段或层,再结合外部磁场的引导来实现。将较短的具有磁性的金属(镍)段嵌入到纳米马达中,该磁性段可以在垂直于纳米线长轴的横向外部磁场下磁化。通过磁场控制运动方向,可控制纳米马达沿着预定的轨迹运动。本体沿着预定轨迹被磁场精确引导和转向,让纳米马达在复杂的微通道网络中沿着预定的路径定向运动,实现在微芯片节点外的磁性分选。利用磁性取向,更好的可视化比较各种实验参数对马达速度的影响。
63.并且仿生本体1不对称设置。由于铂—金段的存在,过氧化氢与仿生本体1上铂—金段接触时,不同位置的分解程度不一样,导致生产气泡的多少不一样,那么形成力的不平衡,从而使仿生本体1发生自转。
64.本实施例中,为了提高速度,在过氧化物溶液中加入肼或银离子,提高纳米或马达的速度和驱动力。速度从5.0pum/s增加至94.0pum/s,速度显著提高近20倍。
65.可选地,一种精准治理污水的纳米机器人,还对管筒8的开闭进行了设计,纳米马达7通过管筒8经流出孔引至锥形头9处。
66.具体地,有两种设计方式,一种是:管筒8的前端经含有偶氮苯的材质封闭,紫外线照射偶氮苯来实现管筒8的开闭,从而控制管筒8输送过氧化氢的开闭,从而实现引导控制。
67.另一种是:在管筒8本身具有多个释放口,释放口处还设置有分子梭;通过分子梭的开闭,实现释放口的开闭,实现管筒8输送过氧化氢的开闭,从而实现锥形头9的引导控制,用于控制纳米机器人是否驱动动作。
68.具体地,分子梭包括环部分、直线部分,直线部分从环部分穿过,且直线部分的两端具有阻挡基团;直线部分的一个阻挡基团位于管筒8的释放口内,另一个阻挡基团另一端设有催化反应腔,催化反应腔内装有atp燃料和已糖激酶。分子梭工作时:在紫外线照射下,atp燃料会结合和水解,于是会推动相应的阻挡基团,使得直线部分推动另一端的阻挡基团动作;当没有紫外线的情况下,已糖激酶会将atp的酶进行降解,于是直线部分又往回动作。
69.需要说明的是,为了让紫外线顺利照射,相应位置处设有透明材质。
70.可选地,一种精准治理污水的纳米机器人,对仿生本体1中部的驱动还进行了设计。
71.具体地,仿生本体1的中部设置处的外表面处设置有齿轮5,齿轮5每个齿的同顺时针侧/逆时针侧沉积有pt层。从仿生本体1的过氧化氢燃料释放时,使得水中也有过氧化氢燃料,当齿轮5上的pt层与过氧化氢接触时,过氧化氢被分解,于是实现齿轮5的转动。
72.可选地,一种精准治理污水的纳米机器人,对仿生本体1的尾部还进行了另一种设计,如图2所示。
73.具体地,仿生本体1的尾部装有聚二甲基硅氧烷,其尾部还连接有仿生尾。而在仿生本体1的尾部处,还设置有含有偶氮苯的表层,其将内部的聚二甲基硅氧烷封闭;仿生尾
处,具有pt层。
74.工作时,在紫外光的照射下,含有偶氮苯的表层打开,让聚二甲基硅氧烷释放,从而与仿生尾处的pt层进行催化反应,形成反冲击;在可见光照射下,含有偶氮苯的表层关闭。
75.可选地,一种精准治理污水的纳米机器人,对仿生本体1的尾部处进行了另一种设计,如图4和图5所示。
76.具体地,仿生本体1的尾部处装有氟碳乳液燃料,其尾部还连接有喷气结构;在超声波作用下,氟碳乳液燃料被汽化,从喷气结构中喷出,从而推动纳米机器人高速运动。
77.本实施例中,喷气结构包括多个尾管6,尾管6内嵌有磁层,通过磁场控制尾管6的摆动方向,控制纳米机器人前进的方向。
78.进一步地,尾管6呈dna螺旋状。
79.需要说明的是,上述体积的仿生本体1呈仿生鱼状。
80.需要说明的是,通过反应条件与运动速度的关系,能够对溶液中物质的含量、反应条件进行定量监测;并且运动速度降低时,在污染处停留时间长,能重复对污水进行处理,实现监测和治理的一体化。
81.例如,当存在重金属、农药等有毒物质时,过氧化氢的催化反应程度降低,从而导致运动速度慢,反应了水体中有毒物质的分布。
82.上述实施例仅表达了较为优选的实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。