1.本发明涉及医疗复健领域,特别是涉及一种基于体验质量的下肢外骨骼机器人步态规划方法及系统。
背景技术:
2.目前外骨骼机器人在很多应用领域有较好的发展前景,以色列医疗机械公司rewalk robotics ltd研制的rewalk是目前世界上最为领先的下肢外骨骼机器人,其依赖拐杖支撑并能够实现多种运动模式的切换,包括站立、坐下、行走、爬坡等;日本筑波大学的cybernics研究中心研发的hal-5具有两套控制系统,分别是自主被动控制系统和生物意识主动控制系统,它是目前最为轻巧的外骨骼之一;新西兰的rex nionics公司研发的rex以厚重的外骨骼为代价来使整个机器保持更好的平衡;美国ekso bionics公司的ekso设置内置语音辅助系统并且能统计上传相关数据,以便医疗人员分析使用。
3.以上康复外骨骼机器人都能够帮助下肢截瘫的患者进行一定的下肢运动功能恢复和神经重建。但是目前外骨骼机器人提供的都是单一且重复的步态训练模式,在使用机器人过程中经常会出现机器人的运动滞后于人体运动的情况,因为下发给机器人的人体运动信号一般会晚于使用者的运动意图。这种情况会使得用户在使用外骨骼机器人的时候感受到机器人的拖曳感,这会非常影响康复训练,甚至会导致无法运行。所以在使用下肢外骨骼机器人的时候,患者的体验质量(quality of experience,qoe)往往非常的差劲。此外,现有的康复外骨骼机器人都依赖拐杖或其他辅助支撑工具助力完成行走。
4.基于上述问题,亟需一种新的步态规划方法以提高下肢复健的平稳性及复健质量。
技术实现要素:
5.本发明的目的是提供一种基于体验质量的下肢外骨骼机器人步态规划方法及系统,可提高下肢复健的平稳性及复健质量。
6.为实现上述目的,本发明提供了如下方案:
7.一种基于体验质量的下肢外骨骼机器人步态规划方法,包括:
8.采集多个目标人员行走过程中左右髋关节和左右膝关节的转动角速度和角加速度,得到初级步态数据集;所述目标人员为下肢能够正常行走的人员;
9.采用动态时间规整算法,根据多个目标人员的年龄段和性别,对所述初级步态数据集中的数据分类,并建立各个类别的标准步态模型;所述标准步态模型中包括多个步态、每个步态的步态周期及相邻两步态的步态间隔;
10.体验人员穿戴下肢外骨骼机器人,根据下肢外骨骼机器人内置的标定步态模型进行康复训练测试,并实时记录各步态周期内体验人员的手杖使用次数及机器人拖拽次数;所述标定步态模型为与体验人员的年龄段和性别对应的标准步态模型;
11.根据各步态周期内的手杖使用次数及机器人拖拽次数,确定对应步态周期的体验
质量;
12.基于长短期记忆网络,根据所述标定步态模型及各步态周期的体验质量,对所述体验人员在下一步态周期的步态进行预测,得到所述体验人员的步态预测模型;所述步态预测模型用于为所述体验人员提供下肢康复训练的步态规划。
13.可选地,所述采集多个目标人员行走过程中左右髋关节和左右膝关节的转动角速度和角加速度,得到初级步态数据集,具体包括:
14.在目标人员行走过程中,通过加速度传感器实时采集人体左髋关节、左膝关节、右髋关节及右膝关节的角速度和角加速度,得到初级步态数据集;所述加速度传感器的数量为4个,4个加速度传感器分别固定在人体的左髋关节、左膝关节、右髋关节及右膝关节处。
15.可选地,所述采集多个目标人员行走过程中左右髋关节和左右膝关节的转动角速度和角加速度,得到初级步态数据集,具体包括:
16.通过rgb相机拍摄目标人员行走过程中的多帧图像;
17.针对任意相邻的两帧图像,提取两帧图像中的标记点;所述标记点包括左大腿标记点、左膝盖标记点、左小腿标记点、右大腿标记点、右膝盖标记点及右小腿标记点;
18.根据两帧图像中的标记点,确定对应时刻目标人员左髋关节、右髋关节、左膝关节及右膝关节的角速度和角加速度,得到初级步态数据集。
19.可选地,所述采用动态时间规整算法,根据多个目标人员的年龄段和性别,对所述初级步态数据集中的数据分类,并建立各个类别的标准步态模型,具体包括:
20.采用动态时间规整算法,根据多个目标人员的年龄段和性别,将初级步态数据集中的数据分为多个类别;
21.针对任一类别,将所述类别中的数据进行最小二乘法多项式曲线拟合,得到所述类别的初始步态模型;所述初始步态模型中包括多个初始步态、各初始步态的步态周期及相邻两初始步态的步态间隔;
22.基于机器人动力学模型,采用虚拟机器人对所述初级步态模型进行仿真测试,并根据所述虚拟机器人反馈的误差,调整所述初始步态模型中各初始步态的步态周期及相邻两初始步态的步态间隔,直至误差最小时,将当前各初始步态对应的初始步态模型作为所述类别的标准步态模型。
23.可选地,所述根据各步态周期内的手杖使用次数及机器人拖拽次数,确定对应步态周期的体验质量,具体包括:
24.针对任一步态周期,根据所述步态周期内的手杖使用次数及固定行走次数,确定第一体验质量;
25.根据所述步态周期内的机器人拖拽次数及固定行走次数,确定第二体验质量;
26.根据所述第一体验质量及所述第二体验质量,确定所述步态周期的体验质量。
27.可选地,根据以下公式,确定第一体验质量:
[0028][0029]
其中,q1为第一体验质量,m为固定行走次数,a为手杖使用次数;
[0030]
根据以下公式,确定第二体验质量:
[0031][0032]
其中,q2为第二体验质量,b为机器人拖拽次数;
[0033]
根据以下公式,确定步态周期的体验质量:
[0034]
q=α
·
(ω1·
q1 ω2·
q2) 1;
[0035]
其中,q为步态周期的体验质量,α为量化系数,ω1为第一体验质量的权重,ω2为第二体验质量的权重。
[0036]
可选地,所述基于体验质量的下肢外骨骼机器人步态规划方法还包括:
[0037]
将所述体验人员的步态预测模型导入下肢外骨骼机器人,体验人员穿戴所述下肢外骨骼机器人进行康复训练;
[0038]
根据下肢外骨骼机器人反馈的力矩信息,实时调整所述步态预测模型的角速度、角加速度、步态间隔及步态周期。
[0039]
为实现上述目的,本发明还提供了如下方案:
[0040]
一种基于体验质量的下肢外骨骼机器人步态规划系统,包括:
[0041]
数据采集单元,用于采集多个目标人员行走过程中左右髋关节和左右膝关节的转动角速度和角加速度,得到初级步态数据集;所述目标人员为下肢能够正常行走的人员;
[0042]
分类单元,与所述数据采集单元连接,用于根据多个目标人员的年龄段和性别,对所述初级步态数据集中的数据分类,并建立各个类别的标准步态模型;所述标准步态模型中包括多个步态、每个步态的步态周期及相邻两步态的步态间隔;
[0043]
测试单元,与所述分类单元连接,用于使体验人员穿戴下肢外骨骼机器人,根据下肢外骨骼机器人内置的标定步态模型进行康复训练测试,并实时记录各步态周期内体验人员的手杖使用次数及机器人拖拽次数;所述标定步态模型为与体验人员的年龄段和性别对应的标准步态模型;
[0044]
质量确定单元,与所述测试单元连接,用于根据各步态周期内的手杖使用次数及机器人拖拽次数,确定对应步态周期的体验质量;
[0045]
步态预测单元,分别与所述测试单元及所述质量确定单元连接,用于基于长短期记忆网络,根据所述标定步态模型及各步态周期的体验质量,对所述体验人员在下一步态周期的步态进行预测,得到所述体验人员的步态预测模型;所述步态预测模型用于为所述体验人员提供下肢康复训练的步态规划。
[0046]
可选地,所述数据采集单元包括:
[0047]
左髋关节传感器,固定在目标人员的左髋关节处,用于采集所述目标人员左髋关节的角速度和角加速度;
[0048]
右髋关节传感器,固定在目标人员的右髋关节处,用于采集所述目标人员右髋关节的角速度和角加速度;
[0049]
左膝关节传感器,固定在目标人员的左膝关节处,用于采集所述目标人员左膝关节的角速度和角加速度;
[0050]
右膝关节传感器,固定在目标人员的右膝关节处,用于采集所述目标人员右膝关节的角速度和角加速度。
[0051]
可选地,所述数据采集单元包括:标记点及rgb相机;所述标记点包括左大腿标记
点、左膝盖标记点、左小腿标记点、右大腿标记点、右膝盖标记点及右小腿标记点;
[0052]
所述左大腿标记点设置在目标人员的左大腿处;所述左膝盖标记点设置在目标人员的左膝盖处;所述左小腿标记点设置在目标人员的左小腿处;
[0053]
所述右大腿标记点设置在目标人员的右大腿处;所述右膝盖标记点设置在目标人员的右膝处;所述右小腿标记点设置在目标人员的右小腿处;
[0054]
所述rgb相机用于采集所述目标人员行走过程中的多帧图像,提取出各图像中的标记点,并根据相邻两帧图像中的标记点,确定对应时刻目标人员左髋关节、右髋关节、左膝关节及右膝关节的角速度和角加速度,得到初级步态数据集。
[0055]
根据本发明提供的具体实施例,本发明公开了以下技术效果:分别建立各个年龄段及性别的标准步态模型,根据康复训练过程中体验人员的手掌使用次数及机器人拖拽次数确定体验质量,然后采用长短期记忆网络,根据标定步态模型及各步态周期的体验质量,对体验人员在下一步态周期的步态进行预测,给出最符合该体验人员人体生理特征的个性化训练步态,可以让使用患者摆脱拐杖实现稳定行走。
附图说明
[0056]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0057]
图1为本发明基于体验质量的下肢外骨骼机器人步态规划方法的流程图;
[0058]
图2为4个传感器的佩戴位置及佩戴方式示意图;
[0059]
图3为标记点的位置示意图;
[0060]
图4(a)为传感器方式采集的步态示意图;
[0061]
图4(b)为图像处理方式采集的步态示意图;
[0062]
图4(c)为传感器和图像处理方式相互校准后的步态示意图;
[0063]
图5为基于分类的标准步态模型的实现框图;
[0064]
图6为下肢外骨骼机器人的机械结构示意图;
[0065]
图7为本发明基于体验质量的下肢外骨骼机器人步态规划系统的模块结构示意图。
[0066]
符号说明:
[0067]
右髋关节传感器-1,右膝关节传感器-2,左髋关节传感器-3,左膝关节传感器-4,长连杆-5,右大腿标记点-6,右膝盖标记点-7,右小腿标记点-8,大腿力传感器-9,小腿力传感器-10,足底力传感器-11,髋关节执行单元-12,膝关节执行单元-13,踝关节连接点-14,数据采集单元-15,分类单元-16,测试单元-17,质量确定单元-18,步态预测单元-19。
具体实施方式
[0068]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他
实施例,都属于本发明保护的范围。
[0069]
本发明的目的是提供一种基于体验质量的下肢外骨骼机器人步态规划方法及系统,通过根据患者的生理特性以及行走特征,考虑用户的体验质量,给出针对性的个性化步态预测模型,实现不需要依赖拐杖支撑就能稳定行走的效果,并且有极好的体验质量,进而能够让下肢外骨骼机器人更好地帮助患者进行下肢康复训练。
[0070]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0071]
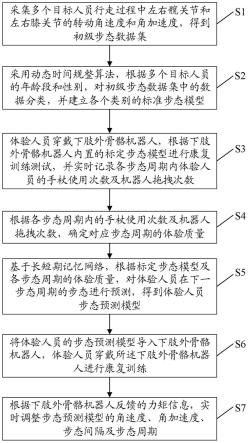
如图1所示,本发明基于体验质量的下肢外骨骼机器人步态规划方法包括:
[0072]
s1:采集多个目标人员行走过程中左右髋关节和左右膝关节的转动角速度和角加速度,得到初级步态数据集。所述目标人员为下肢能够正常行走的人员。
[0073]
s2:采用动态时间规整算法,根据多个目标人员的年龄段和性别,对所述初级步态数据集中的数据分类,并建立各个类别的标准步态模型。所述标准步态模型中包括多个步态、每个步态的步态周期及相邻两步态的步态间隔。在本实施例中,每个步态周期包括多组左右髋关节和左右膝关节的转动角速度和角加速度。
[0074]
s3:体验人员穿戴下肢外骨骼机器人,根据下肢外骨骼机器人内置的标定步态模型进行康复训练测试,并实时记录各步态周期内体验人员的手杖使用次数及机器人拖拽次数。所述标定步态模型为与体验人员的年龄段和性别对应的标准步态模型。具体地,将各个类别的标准步态模型导入到实际机器人上,让各类别的使用者穿戴下肢外骨骼机器人进行测试。
[0075]
s4:根据各步态周期内的手杖使用次数及机器人拖拽次数,确定对应步态周期的体验质量。
[0076]
s5:基于长短期记忆网络,根据所述标定步态模型及各步态周期的体验质量,对所述体验人员在下一步态周期的步态进行预测,得到所述体验人员的步态预测模型。所述步态预测模型用于为所述体验人员提供下肢康复训练的步态规划。
[0077]
进一步地,如图2所示,步骤s1具体包括:在目标人员行走过程中,通过加速度传感器实时采集人体左髋关节、左膝关节、右髋关节及右膝关节的角速度和角加速度,得到初级步态数据集;所述加速度传感器的数量为4个,4个加速度传感器分别固定在人体的左髋关节、左膝关节、右髋关节及右膝关节处。在本实施例中,4个加速度传感器均采用pmu6050。具体地,同一条腿上的两个加速度传感器之间用长连杆5连接,以保证采集的角速度和角加速度数据完全来自矢状面。4个加速度传感器以蓝牙形式发送数据。
[0078]
作为另一种实施方式,如图3所示,步骤s1具体包括:通过rgb相机拍摄目标人员行走过程中的多帧图像。针对任意相邻的两帧图像,提取两帧图像中的标记点。所述标记点包括左大腿标记点、左膝盖标记点、左小腿标记点、右大腿标记点6、右膝盖标记点7及右小腿标记点8。根据两帧图像中的标记点,确定对应时刻目标人员左髋关节、右髋关节、左膝关节及右膝关节的角速度和角加速度,得到初级步态数据集。
[0079]
此外,本发明还可以同时使用rgb相机和加速度传感器的方式采集步态数据。将两种方式采集的数据进行帧率统一、同步等调整,并进行相互校准,互相提出干扰数据,以得到初级步态数据集。
[0080]
具体地,选定步态运动相位变化的关键点,以图像处理方式获得的步态数据为基
础,如图4(b),向数据间隔中插值由加速度传感器获得的步态数据,如图4(a),以弥补图像方式存在的步态信息缺失的缺陷,同时替换存在具有较大测量误差的数据点。如图4(c)获取了人体步态的关键信息,剔除了几个误差数据点。
[0081]
更进一步地,如图5所示,步骤s2具体包括:
[0082]
s21:采用动态时间规整算法,根据多个目标人员的年龄段和性别,将初级步态数据集中的数据分为多个类别。具体地,所述类别包括青年男性、青年女性、中年男性、中年女性、老年男性及老年女性。
[0083]
首先初步根据人类的生理特性以及步态运动规律将患者根据男女性别和青年(30岁以下)、中年(30至60岁)、老年(60岁以上)三个年龄段分为了青年男性、青年女性、中年男性、中年女性、老年男性、老年女性。利用初级步态数据集中的数据,通过动态时间规整算法获得了各个年龄段之间步态曲线的相似度,如表1。表中斜角上的值为同一个类别的两个不同的步态曲线的相似度,用作对比数据,同时也验证可以通过动态时间规整算法来计算步态曲线之间的相似性。
[0084]
表1不同类别之间的步态相似度
[0085]
相似度中年男中年女老年男老年女年轻男年轻女中年男104542464029246288592605148230中年女246401195129748263423808336536老年男292642974812967248472753256029老年女288592634224847103943576830063青年男260513808327532357681483525161青年女480233653656029300632516111089
[0086]
各个年龄段内对象的步态曲线比跨年龄对象之间的步态曲线有更高的相似性,同时随着年龄差距的增大,步态曲线的相似性也会不断有所减小,另外,性别对步态曲线的相似度也有非常大的影响,这是由于来自性别的直接人体构造差异来自年龄增长造成的纵向生理变化必然会引起人体走路姿态和习惯的变化。由此可见,本发明按照年龄段和性别对初级步态模型进行分类具有很高的可靠性和正确性。
[0087]
s22:针对任一类别,将所述类别中的数据进行最小二乘法多项式曲线拟合,得到所述类别的初始步态模型。所述初始步态模型中包括多个初始步态、各初始步态的步态周期及相邻两初始步态的步态间隔。
[0088]
s23:基于机器人动力学模型,采用虚拟机器人对所述初级步态模型进行仿真测试,并根据所述虚拟机器人反馈的误差,调整所述初始步态模型中各初始步态的步态周期及相邻两初始步态的步态间隔,直至误差最小时,将当前各初始步态对应的初始步态模型作为所述类别的标准步态模型。
[0089]
在本实施例中,同比例构建虚拟机器人进行反复仿真测试,并根据机器人动力学模型进行实际测试,根据测试过程中的力矩等反馈信息调整初始步态模型的缺陷,使步态模型能够符合下肢外骨骼机器人的硬件条件同时满足患者下肢康复要求,得到符合各个年龄段和性别的标准步态模型。
[0090]
具体地,由于要将步态模型应用于实际的机器人上,所以需要根据硬件的需求和实际的应用环境调整初始步态模型。首先利用初始步态模型,选取不同的间隔,在每个间隔
下从初始步态模型中获得该间隔下的一组初级数据;根据实际机器人的硬件情况,对初级数据进行规范化处理使数据能够用于实际机器人,并获得处理后的模型误差;选取使处理误差最小的输入步态间隔和步态周期,并获得对应的新一级步态模型,作为后续虚拟和实际机器人测试的输入步态数据。
[0091]
根据机器人的测试情况,如果同时满足虚拟和实际测试,则该步态模型就作为最终的标准步态模型;如果不满足虚拟测试或实际测试,则需要重新选取间隔以及步态周期,并将现在的模型作为下一级步态模型的参考模型,直到满足测试,获得最终的标准步态模型。
[0092]
进一步地,步骤s4具体包括:
[0093]
s41:针对任一步态周期,根据所述步态周期内的手杖使用次数及固定行走次数,确定第一体验质量。
[0094]
在本实施例中,根据以下公式,确定第一体验质量:
[0095][0096]
其中,q1为第一体验质量,m为固定行走次数,a为手杖使用次数。
[0097]
s42:根据所述步态周期内的机器人拖拽次数及固定行走次数,确定第二体验质量。
[0098]
在本实施例中,根据以下公式,确定第二体验质量:
[0099][0100]
其中,q2为第二体验质量,b为机器人拖拽次数。
[0101]
s43:根据所述第一体验质量及所述第二体验质量,确定所述步态周期的体验质量。
[0102]
在本实施例中,根据以下公式,确定步态周期的体验质量:
[0103]
q=α
·
(ω1·
q1 ω2·
q2) 1;
[0104]
其中,q为步态周期的体验质量,α为量化系数,ω1为第一体验质量的权重,ω2为第二体验质量的权重。
[0105]
记g=ω1·
q1 ω2·
q2,且g∈[0,1]。根据用户实际测试,ω1》ω2,且ω1 ω2=1。然后将体验质量得分量化至1-5分,令q=α
·
g 1,使得q∈[1,5],假设g到q的映射服从均匀分布,则α=4。
[0106]
具体地,由于每个人对于主观测试的标准不同,因此本发明充分考虑体验者的使用状况,量化体验质量,要求体验者分别体验当前步态周期和参考模式,记录体验者在固定步态行走次数下的数据。手杖使用次数是指体验者在整个过程中无法保持平衡而使用手杖进行支撑的次数,由其他观察者记录,体验者使用手杖支撑稳定后应及时抬起手杖;机器人出现拖曳的次数是指体验者感受到机器人预测的步态与自身不一致,导致出现体验者被动受机器人拖拽情况的次数,由体验者自身记录。从而得到当前步态周期的体验质量,并将体验质量值量化至1-5分,量化后的体验质量值与舒适度对应情况见表2。在本实施例中,体验者为下肢瘫痪的患者。
[0107]
表2
[0108][0109][0110]
另外,对于数据库中已经存储步态数据的患者,或是具有一定的行走能力,且能够通过加速度传感器和/或rgb相机采集步态的患者。则可以将该患者的步态直接导入到机器人中进行测试,并获取相应的体验质量。
[0111]
在步骤s5中,以标定步态模型的数据或实时采集的步态数据为基础,将获得的相应的体验质量评分作为特征进行lstm(long short term memory,长短期记忆网络)模型的训练。算法预测结果作为该使用者的个性化预测步态。并将获得的步态进行实际测试得到最终个性化步态。
[0112]
具体地,训练数据来自初级步态数据集,其中包括各类别的共2000组(60000个)步态数据。由于客观模型评价法需要巨大的时间成本和人力成本,通过实验不足以获得能够满足实现lstm的评分数据。所以本发明通过wfl定律(weber-fechner,韦伯-费希纳)模拟获得足够的数据。wfl是心理学上一个描述现实物理刺激与人类心理感知之间关系的定律。该定律的结论可以用公式表示:
[0113][0114]
其中,s0表示作为对比的最小的物理刺激大小,s表示当前的物理刺激的大小,p表示测试者的心理感受,k为定律系数。在下肢外骨骼人的步态模型中,s0表示原始步态,s表示待测步态,p表示测试者的体验质量。本方法的目标是提高康复效果和使用体验,这是心理范围上的感知,而过程则是通过平衡控制算法来设计最为合理的步态,这是客观的物理变量。通过上述公式可以得到,本发明所实现的预测算法将主观与客观联系在了一起,科学合理地提高用户体验。通过wfl模拟出了每组步态的评分。将步态与评分即使用者的qoe作为lstm预测算法的训练数据。
[0115]
在本实施例中,lstm算法设置的训练间隔为50(一个步态周期中的数据个数),在每个时间步中,网络的输入为一个二维向量θ,θ=(p,q);p表示输入的步态向量,其中分别表示步态点,步态点表示某一个时刻采样到的步态数据,包括角速度和角加速度,以50个步态点(一个步态周期)为一组构成一个步态向量,n表示训练数据的长度;q表示输入的体验质量,组构成一个步态向量,n表示训练数据的长度;q表示输入的体验质量,即对于任意一组输入步态向量,有同一个体验质量。
[0116]
为了进一步提高下肢康复训练的效率,本发明基于体验质量的下肢外骨骼机器人步态规划方法还包括:
[0117]
s6:将所述体验人员的步态预测模型导入下肢外骨骼机器人,体验人员穿戴所述下肢外骨骼机器人进行康复训练。
[0118]
s7:根据下肢外骨骼机器人反馈的力矩信息,实时调整所述步态预测模型的角速度、角加速度、步态间隔及步态周期。
[0119]
具体地,步骤s6具体包括:体验者穿戴并启动外骨骼机器人和上位机,完成机器人校零操作后,用网线将机器人与上位机相连并建立通信连接。将步态预测模型经过控制器转化为具体的动力运动命令(例如角速度),然后通过上位机输入到各个主动关节(左右髋关节、左右膝关节)中,通过执行器来驱动外骨骼机器人运动。机器人带动体验者行走,并通过机器人上的力传感器将力矩信息实时反馈给上位机。
[0120]
步骤s7具体包括:根据机器人动力学模型,将得到的力矩信息与步态预测模型的数据进行匹配和验证,重复测试并调整角速度、角加速度、步态间隔及步态周期,以获得让体验者有最好的体验质量和满足机器人硬件的步态数据。
[0121]
本发明针对下肢截瘫的患者,提供一种基于体验质量的下肢外骨骼机器人步态规划方法,首先设计人体步态采集装置采集正常人行走的步态,建立步态数据库,然后对步态进行分类并得到各个类别的标准步态模型。通过客观模型测试获得与各个步态相对应的用户体验质量,进而以标准步态数据为基础,实现基于体验质量的lstm预测,获得的结果经过测试以后得到最终个性化步态预测模型。
[0122]
本发明采用的下肢外骨骼机器人(例如fourierx2)包括机器人主体(背包)、机器人的左腿和右腿。左腿和右腿为机器人行走的驱动部位,是对称结构。左腿包括3个活动关节:左髋关节、左膝关节和左踝关节,右腿包括3个活动关节:右髋关节、右膝关节和右踝关节。下肢外骨骼机器人还包括:髋关节执行单元12、膝关节执行单元13及踝关节连接点14。左髋关节、左膝关节、右髋关节和右膝关节分别由对应的电机(执行单元)控制,具有主动自由度,可以向其输入动力学数据(例如角度,角速度)来控制机器人的运动和前进。踝关节不含电机,为被动自由度,随着穿戴者踝关节角度的变化而变化。
[0123]
机器人左腿和右腿上各有3个力传感器:大腿力传感器9、小腿力传感器10及足底力传感器11,分别位于大腿中部、小腿中部和足底,用于检测患者穿戴机器人行走过程中各个位置的拉压力,以作为动力学模型的力矩数据。
[0124]
本发明将实际测试中生成的反馈力矩与仿真测试中的得到的反馈力矩函数比对,调整使两个反馈力矩曲线保持一致。能够将实际测试中的真实力矩数据反馈给仿真环境用于进一步调整标准步态模型。通过不断地测试与反馈,对步态预测模型进行不断地优化,以提高用户体验质量。
[0125]
如图7所示,本发明基于体验质量的下肢外骨骼机器人步态规划系统包括:数据采集单元15、分类单元16、测试单元17、质量确定单元18及步态预测单元19。
[0126]
其中,所述数据采集单元15用于采集多个目标人员行走过程中左右髋关节和左右膝关节的转动角速度和角加速度,得到初级步态数据集。所述目标人员为下肢能够正常行走的人员。
[0127]
所述分类单元16与所述数据采集单元15连接,所述分类单元16用于根据多个目标
人员的年龄段和性别,对所述初级步态数据集中的数据分类,并建立各个类别的标准步态模型。所述标准步态模型中包括多个步态、每个步态的步态周期及相邻两步态的步态间隔。
[0128]
所述测试单元17与所述分类单元16连接,所述测试单元17用于使体验人员穿戴下肢外骨骼机器人,根据下肢外骨骼机器人内置的标定步态模型进行康复训练测试,并实时记录各步态周期内体验人员的手杖使用次数及机器人拖拽次数。所述标定步态模型为与体验人员的年龄段和性别对应的标准步态模型。
[0129]
所述质量确定单元18与所述测试单元17连接,所述质量确定单元18用于根据各步态周期内的手杖使用次数及机器人拖拽次数,确定对应步态周期的体验质量。
[0130]
所述步态预测单元19分别与所述测试单元17及所述质量确定单元18连接,所述步态预测单元19用于基于长短期记忆网络,根据所述标定步态模型及各步态周期的体验质量,对所述体验人员在下一步态周期的步态进行预测,得到所述体验人员的步态预测模型。所述步态预测模型用于为所述体验人员提供下肢康复训练的步态规划。
[0131]
具体地,所述数据采集单元15包括:左髋关节传感器3、右髋关节传感器1、左膝关节传感器4及右膝关节传感器2。
[0132]
其中,所述左髋关节传感器3固定在目标人员的左髋关节处,所述左髋关节传感器3用于采集所述目标人员左髋关节的角速度和角加速度。
[0133]
所述右髋关节传感器1固定在目标人员的右髋关节处,所述右髋关节传感器1用于采集所述目标人员右髋关节的角速度和角加速度。
[0134]
所述左膝关节传感器4固定在目标人员的左膝关节处,所述左膝关节传感器4用于采集所述目标人员左膝关节的角速度和角加速度。
[0135]
所述右膝关节传感器2固定在目标人员的右膝关节处,所述右膝关节传感器2用于采集所述目标人员右膝关节的角速度和角加速度。
[0136]
作为另一种实施方式,所述数据采集单元15包括:标记点及rgb相机。所述标记点包括左大腿标记点、左膝盖标记点、左小腿标记点、右大腿标记点6、右膝盖标记点7及右小腿标记点8。
[0137]
具体地,所述左大腿标记点设置在目标人员的左大腿处。所述左膝盖标记点设置在目标人员的左膝盖处。所述左小腿标记点设置在目标人员的左小腿处。
[0138]
所述右大腿标记点6设置在目标人员的右大腿处。所述右膝盖标记点7设置在目标人员的右膝处。所述右小腿标记点8设置在目标人员的右小腿处。
[0139]
所述rgb相机用于采集所述目标人员行走过程中的多帧图像,提取出各图像中的标记点,并根据相邻两帧图像中的标记点,确定对应时刻目标人员左髋关节、右髋关节、左膝关节及右膝关节的角速度和角加速度,得到初级步态数据集。
[0140]
此外,数据采集单元还可以用于其他领域的人体步态采集,采集到的各类人群的步态数据可以作为人体步态分析和研究的训练集。
[0141]
相对于现有技术,本发明基于体验质量的下肢外骨骼机器人步态规划系统与上述基于体验质量的下肢外骨骼机器人步态规划方法的有益效果相同,在此不再赘述。
[0142]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说
明即可。
[0143]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。