1.本发明涉及一种农业机械中的移栽机械,特别是叶菜钵苗植物移栽用成排式取苗末端执行器,可用于栽培槽或其它培养种植板穴孔中钵苗的移栽。
背景技术:
2.目前,国外发达国家对温室移栽末端执行器的研究已经到达一定水平,比较有代表性包括韩国设计的气动式取苗机构、设计的指针式机械手、澳大利亚transplant systems公司生产的多种规格的机械手末端执行器、美国rapid automated system公司的rtw型移栽装置。这些移栽末端执行器的自动化程度很高,适合大面积自动移栽作业;然而结构比较复杂,并且成本较高。
3.相比较而言,我国对温室移栽末端执行器的研究刚刚起步,各项技术仍然不成熟,并且我国是农业化大国,农业机械化程度低,劳动人民的技术水平普遍较低,为促进农业生产机械移栽智能化程度,推动移栽技术发展,迫切需要研制出一种满足国情且简单高效、工作可靠、成本低的温室移栽末端执行器以代替人工劳动。
技术实现要素:
4.本发明的目的是克服上述背景技术中的不足,提供一种叶菜钵苗移栽用成排式取苗末端执行器,该末端执行器应能有效配合移栽机进行叶菜钵苗植物移栽,同时具有结构简单、性能可靠、成本较低的特点。
5.本发明采用的技术方案如下:
6.一种叶菜钵苗移栽用成排式取苗末端执行器,其特征在于:该末端执行器包括由外部移栽机携带且带有气缸固定板的背板、连接在背板下端且与所述气缸固定板平行布置的爪片下固定板、固定在所述气缸固定板上且其活动端竖直往下运动的若干直线机构、可活动地定位在爪片下固定板的下方且由所述若干直线机构驱动分别作抓取运动的若干组去苗爪。
7.所述直线机构为气缸;所述活动端为气缸的活塞杆,其该活塞杆的底端往下穿越过气缸固定板上的穿孔后,再固定一爪片上固定板;所述爪片上固定板定位于气缸上固定板与爪片下固定板之间且与爪片下固定板相互平行布置。
8.每组取苗爪包括至少三个对称布置的爪片以及与爪片相配合的爪套。
9.所述爪套的顶端固定在爪片下固定板上,爪套的中下部往下方悬伸,爪套的底端开设有与所述爪片相适合的滑孔,可供爪片可滑动地插入。
10.所述爪片的顶端固定在爪片上固定板上,爪片的底端先往下穿过爪片下固定板上的导向孔,然后再往下穿过爪套的滑孔;从而形成可上下运动的状态。
11.每组取苗爪中,所有的爪片对称布置,与爪片一一配合的爪套也对称布置,从而可在操作时形成夹持抓取叶菜钵苗的姿态。
12.所述爪片下固定板上开设有均布的若干副导向孔;每一副导向孔的数量与所述每
一副取苗爪的爪片数量一致且每一副导向孔均布在同一圆周方向。
13.每个爪套固定件上开设有对称布置的缺口,并且缺口形状与爪套顶端的结构相吻合,以同时将若干对称布置的爪套压紧固定在爪片下固定板上。
14.本发明的有益效果是:
15.本发明用于温室自动化移栽机的移栽作业,可适应不同规格栽培槽或其它培养种植板穴孔,在移栽机的配合下,可一次性进行多株(实施例显示是24株)幼苗的抓取,效率是以往移栽机所达不到的,易于操作,结构简单,性能可靠,定位精准,动作快速干净,放落时基质不劲结,可实现连续作业。
附图说明
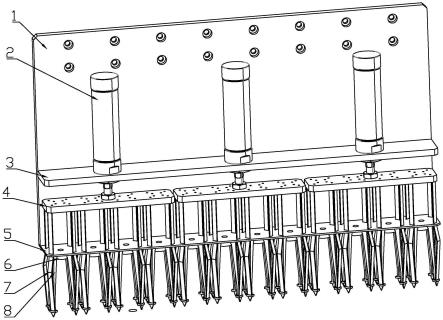
16.图1为本发明的立体结构示意图之一。
17.图2为本发明的立体结构示意图之二。
18.图3为本发明在移栽机上的工作位置示意图。
19.图4为本发明中气缸固定板的立体结构示意图。
20.图5为本发明中爪片上固定板的立体结构示意图。
21.图6为本发明中爪片下固定板的立体结构示意图。
22.图7为本发明中爪片的立体结构示意图。
23.图8为本发明中爪套的立体结构示意图。
24.图9为本发明中爪套固定件的立体结构示意图。
25.图10为本发明单组取苗爪抓取钵苗时的初始状态示意图。
26.图11为本发明单组取苗爪夹紧钵苗时状态示意图。
具体实施方式
27.以下结合说明书附图所示的实施例,对本发明作进一步说明。
28.如图1所示,温室移栽末端执行器,包括背板1、气缸2(即直线机构,活动端为气缸的活塞杆)、气缸固定板3、爪片上固定板4、爪片下固定板5、爪套固定件6、爪片7、爪套8。
29.所述气缸(图中显示三个气缸;优选双行程气缸)竖直安装在气缸固定板3的顶面,气缸伸出时,爪片呈夹紧状态,气缸回缩时,爪片呈展开状态。
30.所述气缸的活塞杆向下穿过气缸固定板的通孔3.1后,再通过连接件与爪片上固定板固定,爪片上固定板上开设有相配合的连接孔4.2(图中显示:三个气缸的活塞杆分别与一爪片上固定板固定,并且爪片上固定板保持与爪片下固定板相互平行),所述气缸工作时可推动爪片上固定板在竖直方向上伸缩运动。若干组(图中显示有一字型排列的12组)取苗爪固定在爪片上固定板的底面上,每组取苗爪包括至少三个对称布置的爪片(图中显示有四个爪片)以及与爪片相配合的爪套7;每组取苗爪中,爪套的数量与爪片数量一致。
31.所述爪片下固定板固定在背板的底端(螺栓穿过爪片下固定板边沿的若干开孔5.2后将爪片下固定板固定在背板上)。所述爪套的顶端通过爪套固定件6固定在爪片下固定板上(螺栓与爪片下固定板上的螺孔5.3配合,将爪套固定件固定在爪片下固定板的下表面);每个爪套固定件上开设有对称布置的缺口(缺口形状与爪套顶端的结构相吻合)可同时将四个对称布置的爪套(同一组取苗爪中的爪套)压紧固定在爪片下固定板上。爪套的中
下部往下方悬伸,爪套的底端开设有与所述爪片相适合的滑孔,可供爪片可滑动地插入。在抓取叶菜钵苗过程中,爪套既有导向和限位作用,在爪片收缩放苗的时候也可以起到往下推苗的作用,使得钵苗能更顺利的从爪片上面脱落,更容易放入到接苗杯中。
32.爪片下固定板上开设有若干组便于爪片穿过的导向孔5.1,每一组导向孔的数量与所述的每一副取苗爪的爪片数量一致且每一组导向孔均布在同一圆周方向(由图可知一共有12组,每组四个导向孔),每组的导向孔位置与每组取苗爪中的爪片一一对应布置。
33.所述爪片呈长条形;爪片的顶端通过螺钉固定在爪片上固定板的下表面(每组取苗爪中的爪片对称布置),爪片的底端先往下穿过爪片下固定板上的导向孔5.1,然后再往下穿过爪套的滑孔8.1;从而形成可上下运动的状态。爪片的中部具有一定的弯曲形状(弯曲程度可根据需要确定),从而使得同一组取苗爪的爪片在沿着滑孔往下运动的同时,也同时往对称中心(对应于同一圆周方向的圆心)移动,从而协同配合作夹紧并抓取叶菜钵苗的操作。
34.本发明还配置有连通气缸使用的气源(优选空气压缩机;图中省略)。
35.本发明的工作步骤如下
36.步骤一:气缸推杆收缩,带动爪针回归初始位置,如图7所示;
37.步骤二:气缸推杆伸长推动爪片上固定板,来推动爪片的下降;当爪片上固定板里与下固定板有轻微接触的时候,抓取工作已经完成,钵苗已经被抓取(为避免损伤钵苗,需要带着钵苗营养土一起抓取),如图8所示。
38.步骤三:外部移栽机(图中未显示)将抓取钵苗的末端执行器向上提升,移植至目标位置;气缸推杆回缩,各爪针张开,将钵苗放入目标容器,气缸推杆
39.继续收缩,直至末端执行器回归初始位置,开始下个钵苗移栽工作。
40.最后,需要注意的是,以上列举的仅是本发明的具体实施例。显然,本发明不限于以上实施例,还可以有很多变形。本领域的普通技术人员能从本发明公开的内容中直接导出或联想到的所有变形,均应认为是本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。