1.本发明涉及网络通讯领域,尤其涉及一种蛇形机器人内部狭小空间内微型通讯网关领域。
背景技术:
2.管网运输是自来水、天然气等最基本的运输方式,每个城市的地下都布满四通八达的管道。但是随着使用时长的增加,管道会出现腐蚀破损、泄漏的情况,造成资源浪费,因此需要及时对管道进行主动检修,对管道的漏损情况进行提前诊断。由于管道埋于地下、穿越公路楼房,且管道内部空间狭小,常规仪器和检测手段难已完成主动检修,管道机器人应运而生。
3.管道机器人采用蛇形结构,具有视觉舱、控制舱、综合舱、驱动舱,各舱体之间采用串行软连接,以便于在狭长空间进行探测。机器人不仅需要采集管道内部多个环境参数,如温度、压力、流速、磁场强度、机器人姿态,而且需要采集管道内部的视频图像、声音,并将这些数据实时传送至云服务器进行分析、计算。要实现蛇形管道机器人这些功能,相应的对机器人内部的控制线路也提出了较高的要求,主要表现在:蛇形机器人采用多cpu结构;各舱位控制线路采用串行结构,要求通讯方式灵活、快速;能传输视频图像,要求通讯具有较高的带宽;具备rs485、rs232、以太网、光纤通讯多种通信接口,方便各舱体间信息的交互通讯;网络通讯电路板尺寸要求不大于40mm
×
50mm。
4.综上,本实用新型设计了一种蛇形机器人内部狭小空间微型通讯网关,不仅能够实现多种异构网络交互通讯,而且能将内部所有数据、音视频通过一根单模单纤传输到数据平台,有效解决在空间受限的狭小空间内各舱体之间的网络通讯、协议转换、信息集成传输问题。
技术实现要素:
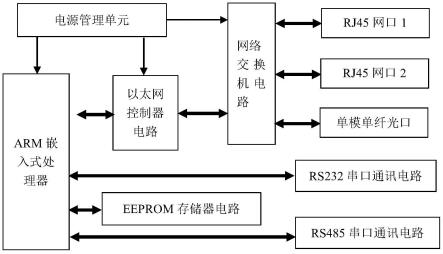
5.本实用新型设计了一种蛇形机器人内部狭小空间微型通讯网关,主要包括:arm嵌入式处理器、电源、eeprom存储器电路、以太网控制器电路、网络交换机电路、以太网电口、以太网单模单纤光口、rs232串口通讯电路、rs485串口通讯电路。电源分别与arm嵌入式处理器、以太网控制器电路和网络交换机电路连接;所述的arm嵌入式处理器与以太网控制器电路进行交互连接,以太网控制器电路与网络交换机电路行交互连接;所述的arm嵌入式处理器与eeprom存储器电路、rs232串口通讯电路和rs485串口通讯电路进行交互连接;网络交换机电路分别与rj45网口1、rj45网口2、单模单纤光口进行交互连接。
6.所述的电源实现dc-dc电源变换,将外部输入的直流24v电压变换成直流3.3v,为arm嵌入式处理器和各通讯接口电路提供所需要的电源。
7.所述的arm嵌入式处理器是网关数据分析、处理、计算和协议转换单元,一方面通过spi总线扩展以太网通讯接口,通过i2c总线扩展了eeprom,通过异步串口usart扩展了rs232和rs485通讯接口,另一方通过程序代码,实现异构网络接口的通讯协议转换。
8.所述的以太网控制器电路实现arm嵌入式处理器以太网接口扩展,一方面通过spi总线和处理器连接,另一方面和网络交换机电路连接,实现多个网络接口和光纤接口扩展。同时该部分电路采用全硬件tcp/ip协议栈,具有10/100mbps以太网网络层和物理层,支持tcp、udp、ipv4、icmp、arp、igmp和pppoe协议,使用32kb缓存作为网络通讯数据内存,支持8个独立端口同时运行。
9.所述的网络交换机电路采用5口交换机芯片作为核心器件,其中:1个tx网口和以太网控制器相连接,1个fx网口作为以太网光口,用于连接外部网络设备,2个tx网口作为以太网电口,用于连接机器人视觉舱的网络摄像头和其它网络模块。
10.所述的eeprom存储器电路通过i2c总线和处理器连接,实现非易失性数据存储,用来保存网络参数、端口地址和系统设置参数。
11.所述的rs232串口通讯电路通过异步通讯接口usart和处理器连接,实现处理器和机器人驱动舱的电路模块连接。
12.所述的rs485串口通讯电路通过异步通讯接口usart和处理器连接,实现处理器和机器人控制舱的电路模块连接。
13.与现有技术相比较,本实用新型具有以下技术优势:
14.将rs232、rs485串行通讯和以太网通讯集成在一个模块上,可实现串行通讯数据和以太网数据双向透明传输。
15.模块集成了以太网光纤接口,模块上的任一通讯接口数据可通过光纤进行远距离传输,最远传输距离可达80km。
16.光纤接口采用单模单纤,减少光纤传输成本,方便工程布线。
17.模块尺寸仅40mm
×
50mm,特别适用于狭小空间场景。
18.综上,本实用新型设计的一种蛇形机器人内部狭小空间微型通讯网关,不仅能够实现多种异构网络交互通讯,而且能将内部所有数据、音视频通过一根单模单纤传输到数据平台,有效解决在空间受限的狭小空间内各舱体之间的网络通讯、协议转换、信息集成传输问题。
19.需要特别说明的是,本实用新型的技术改进点为蛇形机器人内部狭小空间微型通讯网关,主要针对的是蛇形机器人进行的通讯控制系统,上述技术描述中为了凸显技术结构和功能,对各个通讯协议以及相应程序进行了描述,但并不表示本实用新型的技术方案主体需要依照程序或者协议进行,具体的技术架构以及通讯结构在下述具体实施方式进行详述。上述技术特征的描述涉及的产品型号可以在市场上购买得到,程序及通讯协议为系统自带,本实用新型依托的仅是产品结构。
附图说明
20.图1为蛇形管道机器人结构图。图1中,1为视觉舱,2位控制舱,本实用新型通讯网关安装在控制舱壳体内。
21.图2为本实用新型通讯网关接口图。
22.图3为本实用新型通讯网关结构组成框图。
23.图4为本实用新型电源电路图。
24.图5为本实用新型arm嵌入式处理器核心电路图。
25.图6为本实用新型以太网控制器电路图。
26.图7为本实用新型5口交换机电路图。
27.图8为本实用新型eeprom存储器电路图。
28.图9为本实用新型rs232串口通讯电路图。
29.图10为本实用新型rs485串口通讯电路图。
具体实施方式
30.参照附图,本实用新型提出的一种蛇形管道机器人内部狭小空间微型通讯网关。图1为蛇形管道机器人结构图,通讯网关安装在图1中的控制舱2的壳体内;图2为通讯网关接口图,包括2个10/100m自适应tx以太网电口,1个10/100m自适应fx以太网光口,1个rs232全双工串口,1个rs485半双工串口。图3为本实用新型通讯网关结构组成框图,包括:arm嵌入式处理器、电源、eeprom存储器电路、以太网控制器、网络交换机电路、以太网电口、以太网单模单纤光口,rs232串口通讯电路、rs485串口通讯电路。
31.本实施方案中,图4为电源电路图,采用mp1584en电源管理芯片,将外部输入的直流24v电压变换成直流3.3v,为处理器和各通讯接口电路提供所需要的电源。
32.本实施方案中,arm嵌入式处理器采用stm32f103rct6,是网关数据分析、处理、计算和协议转换单元,图5为处理器核心电路图,通过引脚p33、p34、p35、p36、p37、p38和以太网控制器芯片相连接,p33为芯片的片选信号,低电平有效,p34为处理器spi2的时钟信号,p35为处理器spi2的数据输入引脚,p36为处理器spi2的数据输出引脚,通过spi2这4个引脚就可以实现和以太网控制器的数据通讯;p37为中断信号,低电平有效,以太网控制器收到数据后产生该中断信号;p38为以太网控制器的复位信号,在软件设计中用于主动复位以太网控制器芯片。通过引脚p58、p59、p8和eeprom存储器fm24cl04相连接,引脚p58是i2c接口的时钟线,引脚p59是i2c接口的数据线,处理器通过i2c接口实现和fm24cl04的数据读写,引脚p8用作eeprom的写保护,该引脚输出低电平,fm24cl04允许写入数据,输出高电平则禁止写入数据。处理器通过usart4实现rs232通讯接口,引脚p51为异步通讯接口的数据发送端,引脚p52为数据接收端。处理器通过usart1实现rs485通讯接口,引脚p42为异步通讯接口的数据发送端,引脚p43为数据接收端,引脚p41为rs485通讯的数据接收/发送使能端,该引脚为高电平时,允许发送数据,低电平时允许接收数据。
33.本实施方案中,以太网控器电路采用嵌入式集成芯片w5500设计,和arm嵌入式处理器之间采用spi进行接口,图6为w5500接口电路原理图。w5500的引脚p32、p33、p34、p35、p36、p37分别和arm处理器的p33、p34、p35、p36、p37、p38引脚相连接。w5500的p1和p2为网络数据发送引脚的负端和正端,分别和交换机电路中ip175gh的p45和p44引脚相连接,w5500的p5和p6为网络数据接收引脚的负端和正端,和ip175gh的p47和p46引脚相连接。w5500电路采用全硬件tcp/ip协议栈,具有10/100mbps以太网网络层和物理层,支持tcp、udp、ipv4、icmp、arp、igmp和pppoe协议,使用32kb缓存作为网络通讯数据内存,支持8个独立端口同时运行。
34.本实施方案中,图7为5口交换机电路原理图,主芯片选用ip175gh。p44、p45为以太网口0数据接收引脚的正端和负端,和以太网控制器的w5500的p2、p1引脚连接;p46、p47为以太网口0数据发送引脚的正端和负端。ip175gh的p19、p20为以太网光纤接口数据发送引
脚的负端和正端,直接和1*9光模块的发送端口连接,p21、p22为以太网光纤接口数据接收引脚的负端和正端,和1*9光模块的接收端口相连接。ip175gh的引脚1~4为交换机以太网口1的数据发送端和数据接收端,连接到网络变压器,经过网络变压器信号隔离后,得到tx网口1;ip175gh的引脚8~11为交换机以太网口2的数据接收端和数据发送端,连接到网络变压器,经过网络变压器信号隔离后,得到tx网口2。
35.本实施方案中,eeprom存储器采用fm24cl04,和处理器之间采用i2c接口连接,电路原理图见图8;fm24cl04的数据线sda和微处理器stm32f103rct6的p59引脚连接,时钟线scl和微处理器的p58引脚连接;写保护线wp和处理器的p8引脚连接。
36.fm24cl04wei用来保存网络参数、端口地址和系统设置参数。
37.本实施方案中,图9为rs232串行接口电路图,采用sp3232ecy-l作为rs232的驱动器,引脚t1in和处理器usart4的数据发送引脚usart4_tx连接,p12引脚r1out和处理器usart4的数据接收脚usart4_rx连接。通过rs232接口,实现处理器和驱动舱的电路模块通讯。
38.本实施方案中,图10为rs485串行接口电路图,采用sp3485en-l作为rs485的驱动器,p1引脚ro和处理器usart1的数据接收引脚usart1_rx连接;p4引脚di和处理器usart1的数据发送引脚usart1_tx连接,引脚p2和p3为rs485的数据发送/接收使能控制端,为输入引脚,和处理器的引脚41连接,低电平时,数据接收使能,允许接收数据,高电平时,数据发送使能,允许发送数据,处理器通过控制该引脚状态来实现数据接收和数据发送。通过rs485接口,实现处理器和机器人控制舱的电路模块通讯。
39.以上所述,仅为本发明专利的具体实施方式,但本发明专利的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明专利揭露的技术范围内,根据本发明的技术方案及其构思加以等同替换或改变,都应该涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。