1.本实用新型涉及检测设备的技术领域,尤其涉及一种门铃缝隙检测装置。
背景技术:
2.在电子行业中,对一些部件的内缝隙大小有要求的场景,则需要对内缝隙进行检测,内缝隙的检测项目主要有间隙测量与高度差。现有常规的门铃的缝隙检测方式为人工用塞规进行检测,然而人工检测的用的塞规不确保测量的力度可能会有偏差,精度不确保;另外,需要检测的点位比较多,人工检测的时间会比较长,效率低。
技术实现要素:
3.为了解决现有技术的不足,本实用新型提供一种精度高、检测效率高的门铃缝隙检测装置。
4.本实用新型要解决的技术问题是通过以下技术手段来实现的:一种门铃缝隙检测装置,它包括输送轨道和分别先后设置在所述输送轨道上的缝隙高度差检测模块与缝隙间隙检测模块,所述缝隙高度差检测模块包括激光头支架、设置在所述激光头支架上的第一位移单元和设置在所述第一位移单元上的激光头,所述缝隙间隙检测模块包括相机支架、设置在所述相机支架上的第二位移单元和设置在所述第二位移单元上的ccd相机,所述激光头和所述ccd相机均分别朝向正下方的所述输送轨道,所述激光头支架上设置有plc控制器,所述ccd相机与所述plc控制器电连接。
5.在上述方案中,缝隙高度差检测模块用于通过激光头检测门铃缝隙的高度差,缝隙高度差检测模块配置寄存器,用来储存产品测试点位的数据,激光头会按照调试的点位进行按顺序的测量,激光头扫描得到的数据经过处理转化输出到plc控制器里。缝隙高度差检测模块通过ccd相机检测门铃缝隙的间隙,ccd相机根据之前的点位进行移动,点位到达后,plc控制器控制ccd相机进行拍照,得到的数据会直接给到寄存器里面。本实用新型免人工检测采用机件提高了检测的速度,精度得到了提升。
6.进一步的,所述第一位移单元包括设置在所述激光头支架上端的第一丝杆电机,所述激光头支架的内部设置有与所述第一丝杆电机驱动连接的第一丝杆,所述第一丝杆上适配设置有第一滑台,所述第一滑台的前端设置有转动头,所述激光头的上部与所述转动头的下部固定连接。
7.在上述方案中,激光头通过第一滑台可以进行上下位移,通过转动头可以实现转动操作,所以激光头可以进行灵敏上下左右的转动动作,激光头安装在转动头的偏心位置,使得转动可以增加覆盖范围。
8.进一步的,所述第一滑台的末端设置有转孔,所述转动头包括与所述转孔转动配合的上转盘,所述上转盘的下部设置有下转盘,所述下转盘的下部设置有安装凸棱,所述激光头与所述安装凸棱固定连接。
9.进一步的,所述第二位移单元包括设置在所述相机支架上端的第二丝杆电机,所
述相机支架的内部设置有与所述第二丝杆电机驱动连接的第二丝杆,所述第二丝杆上适配设置有第二滑台,所述ccd相机固定设置在所述第二滑台的前端,所述第二滑台的前端的底部设置有延长支架,所述延长支架上设置有光源罩,所述光源罩设置在所述ccd相机的镜头的下部。
10.在上述方案中,ccd相机通过第二滑台可以进行上下位移,令ccd相机可以调整距离实现高精度的拍摄照片;所述光源罩可以为ccd相机进行补光。
11.进一步的,所述光源罩为上窄下宽的锥形形状,所述光源罩的顶部设置有通孔,所述ccd相机的镜头正对所述通孔。
12.进一步的,所述输送轨道在所述缝隙高度差检测模块的前部的扫码枪。
13.在上述方案中,扫码枪用于对待检测产品进行扫描产品序列码,用于识别记录产品。
附图说明
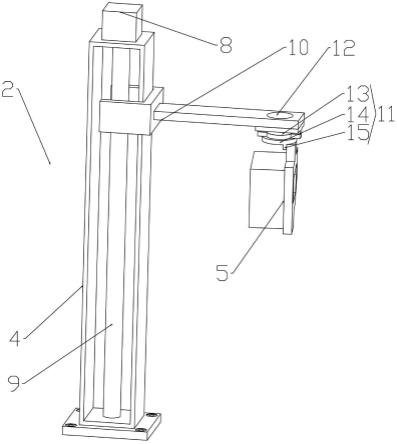
14.图1是本实用新型的缝隙高度差检测模块的结构示意图;
15.图2是本实用新型的缝隙间隙检测模块的结构示意图;
16.图3是本实用新型的结构示意图。
具体实施方式
17.下面结合附图和实施例对本实用新型作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本实用新型,而非对本实用新型的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本实用新型相关的部分而非全部结构。
18.如图1至图3所示,本实用新型所采用的技术方案为,本实用新型为一种门铃缝隙检测装置,它包括输送轨道1和分别先后设置在所述输送轨道1上的缝隙高度差检测模块2与缝隙间隙检测模块3,所述缝隙高度差检测模块2包括激光头支架4、设置在所述激光头支架4上的第一位移单元和设置在所述第一位移单元上的激光头5,所述缝隙间隙检测模块3包括相机支架6、设置在所述相机支架6上的第二位移单元和设置在所述第二位移单元上的ccd相机7,所述激光头5和所述ccd相机7均分别朝向正下方的所述输送轨道1,所述激光头支架4上设置有plc控制器,所述ccd相机7与所述plc控制器电连接。
19.在上述方案中,缝隙高度差检测模块2用于通过激光头5检测门铃缝隙的高度差,缝隙高度差检测模块2配置寄存器,用来储存产品测试点位的数据,激光头5会按照调试的点位进行按顺序的测量,激光头5扫描得到的数据经过处理转化输出到plc控制器里。缝隙高度差检测模块2通过ccd相机7检测门铃缝隙的间隙,ccd相机7根据之前的点位进行移动,点位到达后,plc控制器控制ccd相机7进行拍照,得到的数据会直接给到寄存器里面。本实用新型免人工检测采用机件提高了检测的速度,精度得到了提升。其中输送轨道1为可前后左右运动的轨道,输送轨道1的底部配置了左右位移驱动系统进行左右位移驱动。
20.进一步的,所述第一位移单元包括设置在所述激光头支架4上端的第一丝杆电机8,所述激光头支架4的内部设置有与所述第一丝杆电机8驱动连接的第一丝杆9,所述第一丝杆9上适配设置有第一滑台10,所述第一滑台10的前端设置有转动头11,所述激光头5的上部与所述转动头11的下部固定连接。
21.在上述方案中,激光头5通过第一滑台10可以进行上下位移,通过转动头11可以实现转动操作,所以激光头5可以进行灵敏上下左右的转动动作,激光头5安装在转动头11的偏心位置,使得转动可以增加覆盖范围。
22.进一步的,所述第一滑台10的末端设置有转孔12,所述转动头11包括与所述转孔12转动配合的上转盘13,所述上转盘13的下部设置有下转盘14,所述下转盘14的下部设置有安装凸棱15,所述激光头5与所述安装凸棱15固定连接。
23.进一步的,所述第二位移单元包括设置在所述相机支架6上端的第二丝杆电机16,所述相机支架6的内部设置有与所述第二丝杆电机16驱动连接的第二丝杆17,所述第二丝杆17上适配设置有第二滑台18,所述ccd相机7固定设置在所述第二滑台18的前端,所述第二滑台18的前端的底部设置有延长支架19,所述延长支架19上设置有光源罩20,所述光源罩20设置在所述ccd相机7的镜头21的下部。
24.在上述方案中,ccd相机7通过第二滑台18可以进行上下位移,令ccd相机7可以调整距离实现高精度的拍摄照片;所述光源罩20可以为ccd相机7进行补光。
25.进一步的,所述光源罩20为上窄下宽的锥形形状,所述光源罩20的顶部设置有通孔22,所述ccd相机7的镜头21正对所述通孔22。
26.进一步的,所述输送轨道1在所述缝隙高度差检测模块2的前部的扫码枪23。
27.在上述方案中,扫码枪23用于对待检测产品进行扫描产品序列码,用于识别记录产品。
28.在本实用新型中,扫码枪23识别到产品的产品序列码,然后先去到缝隙高度差检测模块2这个工位进行测量产品的缝隙的高度差,然后再到缝隙间隙检测模块3这个工位测量间隙。本实用新型使用光学的原理,不需要直接接触,直接拍出来间隙。缝隙高度差检测模块2配置寄存器,用来储存产品点位的数据,激光头5会按照调试的点位进行按顺序的测量,外部视觉软件里触发激光头5进行检测,检测得到的数据会经过视觉软件的转化然后由视觉软件来输出到plc控制器里。激光头5测量的点位测量完成后,会进入到ccd相机的拍摄工位,输送轨道会根据之前的点位进行移动,令产品准确来到ccd相机7的正下方,点位到达后,plc控制器给信号,然后视觉软件才触发拍照,得到的数据会直接给到寄存器里面。
29.注意,上述仅为本实用新型的较佳实施例及所运用技术原理。本领域技术人员会理解,本实用新型不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本实用新型的保护范围。因此,虽然通过以上实施例对本实用新型进行了较为详细的说明,但是本实用新型不仅仅限于以上实施例,在不脱离本实用新型构思的情况下,还可以包括更多其他等效实施例,而本实用新型的范围由所附的权利要求范围决定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
