1.本实用新型涉及物流仓储机器人技术领域,尤其涉及一种物流仓储自动化上架装置。
背景技术:
2.现在很多的物流公司的物流仓储都采用了立体仓储系统,通过立体仓储货架配合立体仓储机器人进行使用,能够达到货物的自动化上架工作;
3.而现有的立体仓储机器人主要包括用于驱动移动的底座、用于进行货物升降的剪叉升降平台、以及安装在剪叉升降平台顶部用于抓取以及推动货物的抓取组件,同时配合安装在立体仓储机器人一侧的摄像模组,整体配合完成货物的自动上架下架工作;
4.这种立体仓储机器人使用时虽然非常的方便,但是依旧存在着一定的问题,通常在物流仓储里面会存在着较多的灰尘,立体仓储机器人长期在灰尘较多的环境下使用容易在其摄像模组的表面累积较多的灰尘,从而造成机器人不能够正常的进行识别,从而给上下架工作带来一定的影响。
5.因此,有必要提供一种新的物流仓储自动化上架装置解决上述技术问题。
技术实现要素:
6.为解决上述技术问题,本实用新型提供一种物流仓储自动化上架装置。
7.本实用新型提供的一种物流仓储自动化上架装置,包括移动底座、剪叉式升降组件、载物台、抓取组件、摄像模组、遮灰透明玻璃板、驱动转动机构和除灰机构,所述剪叉式升降组件安装在移动底座的顶部,所述载物台安装在剪叉式升降组件的顶部,所述抓取组件安装在载物台的顶部,所述摄像模组安装在载物台一侧的中部,所述遮灰透明玻璃板转动安装在载物台外壁靠近摄像模组的一侧,且遮灰透明玻璃板位于摄像模组的正前方,所述驱动转动机构固定在载物台的内壁,用于驱动遮灰透明玻璃板转动,所述除灰机构固定在载物台外壁靠近摄像模组的一侧,用于清扫遮灰透明玻璃板上的灰尘。
8.优选的,所述驱动转动机构包括第一支撑板、蜗杆、电机和转轴,两个所述第一支撑板对称固定在载物台的内壁靠近摄像模组一侧的中部,所述蜗杆通过轴承转动连接在两个第一支撑板之间,所述电机固定在载物台的内壁靠近蜗杆的一侧,且蜗杆靠近电机的一端与电机的输出端固定,所述转轴通过轴承转动连接在载物台靠近摄像模组一侧的中部,且转轴的一端与遮灰透明玻璃板的中部固定,所述转轴远离遮灰透明玻璃板的一端贯穿载物台固定有蜗轮,所述蜗轮与蜗杆啮合连接。
9.优选的,所述除灰机构包括第一同步带轮、第二支撑块、转杆、刷毛和第二同步带轮,所述第一同步带轮固定在蜗杆远离电机的一端,两个所述第二支撑块对称固定在载物台外壁靠近摄像模组的一侧,所述转杆通过轴承转动连接在两个第二支撑块之间,且转杆的外壁等距固定有刷毛,所述第二同步带轮固定在转杆靠近第一同步带轮的一端,且第一同步带轮和第二同步带轮通过同步带传动连接。
10.优选的,所述第一同步带轮的直径大于第二同步带轮的直径。
11.优选的,所述电机为减速电机。
12.优选的,所述载物台的外壁靠近摄像模组的一侧对称固定有补光灯。
13.优选的,所述载物台靠近摄像模组的一侧固定有环形滑轨,所述遮灰透明玻璃板靠近环形滑轨的一侧对称固定有环形滑条,所述环形滑条与环形滑轨的内壁转动连接。
14.优选的,所述载物台的内壁靠近转轴的一侧位于转轴的外壁固定有稳定套,所述转轴与稳定套的内壁转动连接。
15.与相关技术相比较,本实用新型提供的物流仓储自动化上架装置具有如下有益效果:
16.本实用新型通过设置的遮灰透明玻璃板能够对灰尘进行阻隔,避免灰尘掉落在摄像模组上,同时通过驱动转动机构和除灰机构的配合工作能够将遮灰透明玻璃板上的灰尘清扫干净,从而有效地避免灰尘对摄像模组工作造成影响,进而避免对货物的上下料工作造成影响,保证了上下架工作的正常。
附图说明
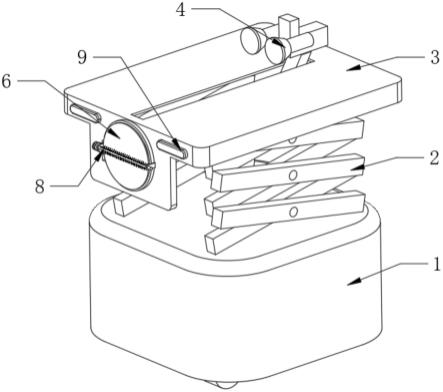
17.图1为本实用新型的整体结构示意图;
18.图2为本实用新型的摄像模组位置结构示意图;
19.图3为本实用新型的驱动转动机构结构示意图;
20.图4为本实用新型的a处放大图;
21.图5为本实用新型的除灰机构结构示意图;
22.图6为本实用新型的b处放大图;
23.图7为本实用新型的环形滑轨位置结构示意图;
24.图8为本实用新型的c处放大图;
25.图9为本实用新型的稳定套位置结构示意图;
26.图10为本实用新型的d处放大图。
27.图中标号:1、移动底座;2、剪叉式升降组件;3、载物台;4、抓取组件;5、摄像模组;6、遮灰透明玻璃板;7、驱动转动机构;71、第一支撑板;72、蜗杆;73、电机;74、转轴;75、蜗轮;8、除灰机构;81、第一同步带轮;82、第二支撑块;83、转杆;84、第二同步带轮;85、同步带;86、刷毛;9、补光灯;10、环形滑轨;11、环形滑条;12、稳定套。
具体实施方式
28.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
29.以下结合具体实施例对本实用新型的具体实现进行详细描述。
30.请参阅图1、图2和图6,本实用新型实施例提供的一种物流仓储自动化上架装置,包括移动底座1、剪叉式升降组件2、载物台3、抓取组件4、摄像模组5、遮灰透明玻璃板6、驱动转动机构7和除灰机构8,所述剪叉式升降组件2安装在移动底座1的顶部,所述载物台3安装在剪叉式升降组件2的顶部,所述抓取组件4安装在载物台3的顶部,所述摄像模组5安装
在载物台3一侧的中部,所述遮灰透明玻璃板6转动安装在载物台3外壁靠近摄像模组5的一侧,且遮灰透明玻璃板6位于摄像模组5的正前方,所述驱动转动机构7固定在载物台3的内壁,用于驱动遮灰透明玻璃板6转动,所述除灰机构8固定在载物台3外壁靠近摄像模组5的一侧,用于清扫遮灰透明玻璃板6上的灰尘。
31.需要说明的是,通过设置的遮灰透明玻璃板6能够对灰尘进行阻隔,避免灰尘掉落在摄像模组5上。
32.请参阅图3、图4和图7,所述驱动转动机构7包括第一支撑板71、蜗杆72、电机73和转轴74,两个所述第一支撑板71对称固定在载物台3的内壁靠近摄像模组5一侧的中部,所述蜗杆72通过轴承转动连接在两个第一支撑板71之间,所述电机73固定在载物台3的内壁靠近蜗杆72的一侧,且蜗杆72靠近电机73的一端与电机73的输出端固定,所述转轴74通过轴承转动连接在载物台3靠近摄像模组5一侧的中部,且转轴74的一端与遮灰透明玻璃板6的中部固定,所述转轴74远离遮灰透明玻璃板6的一端贯穿载物台3固定有蜗轮75,所述蜗轮75与蜗杆72啮合连接。
33.请参阅图4、图5和图6,所述除灰机构8包括第一同步带轮81、第二支撑块82、转杆83、刷毛86和第二同步带轮84,所述第一同步带轮81固定在蜗杆72远离电机73的一端,两个所述第二支撑块82对称固定在载物台3外壁靠近摄像模组5的一侧,所述转杆83通过轴承转动连接在两个第二支撑块82之间,且转杆83的外壁等距固定有刷毛86,所述第二同步带轮84固定在转杆83靠近第一同步带轮81的一端,且第一同步带轮81和第二同步带轮84通过同步带85传动连接。
34.需要说明的是,通过驱动转动机构7和除灰机构8的配合工作能够将遮灰透明玻璃板6上的灰尘清扫干净,从而有效地避免灰尘对摄像模组5工作造成影响,进而避免对货物的上下料工作造成影响,保证了上下架工作的正常。
35.请参阅图6,所述第一同步带轮81的直径大于第二同步带轮84的直径,使得第一同步带轮81转动带动第二同步带轮84转动是增速的。
36.请参阅图4,所述电机73为减速电机。
37.请参阅图1,所述载物台3的外壁靠近摄像模组5的一侧对称固定有补光灯9,使摄像模组5在黑暗环境下能够同样使用。
38.请参阅图7和图8,所述载物台3靠近摄像模组5的一侧固定有环形滑轨10,所述遮灰透明玻璃板6靠近环形滑轨10的一侧对称固定有环形滑条11,所述环形滑条11与环形滑轨10的内壁转动连接,保证遮灰透明玻璃板6稳定转动。
39.请参阅图9和图10,所述载物台3的内壁靠近转轴74的一侧位于转轴74的外壁固定有稳定套12,所述转轴74与稳定套12的内壁转动连接,能够提高转轴74与载物台3连接的稳定性。
40.本实用新型提供的物流仓储自动化上架装置的工作原理如下:
41.使用的时候,定期自动进行遮灰透明玻璃板6的表面灰尘清理工作,清理的时候通过驱动电机73转动,从而带动蜗杆72转动,进而带动蜗轮75转动,蜗轮75转动能够带动转轴74转动,转轴74进而带动遮灰透明玻璃板6转动,而在蜗杆72转动的同时能够带动第一同步带轮81转动,通过同步带85带动第二同步带轮84转动,进而带动转杆83转动,从而能够使得刷毛86在遮灰透明玻璃板6的表面刷动,同时随着遮灰透明玻璃板6的转动能够使得其表面
的灰尘被全面的扫除,从而能够达到自动除尘的效果;
42.本实用新型能够有效地避免灰尘掉落在摄像模组5上,从而有效地避免灰尘对摄像模组5工作造成影响,避免对货物的上下料工作造成影响,保证了上下架工作的正常。
43.本实用新型中涉及的电路以及控制均为现有技术,在此不进行过多赘述。
44.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。